
一种卫星VDES系统的信道估计方法.pdf

如灵****姐姐


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种卫星VDES系统的信道估计方法.pdf
本发明属于无线通信技术领域,具体涉及一种卫星VDES系统的信道估计方法。该方法包括以下步骤:一、构造块状导频结构;二、构造数据传输模型;三、建立IEKF预测、更新方程,输出下一个符号的估计点;四、在新的估计点进行多次迭代减少非线性误差,提高信道估计精度;五、IEKF输出的后验估计值将其转化为基向量系数,计算信道响应矩阵。与现有的卫星信道估计方法相比,本发明使用IEKF估计方法可以有效的跟踪快时变信道变化,降低多普勒频移的影响,提高信道估计精度。采用BEM减少待估参数个数,降低计算复杂度。可以有效保障卫星V
一种低轨卫星OFDM通信系统信道估计方法及装置.pdf
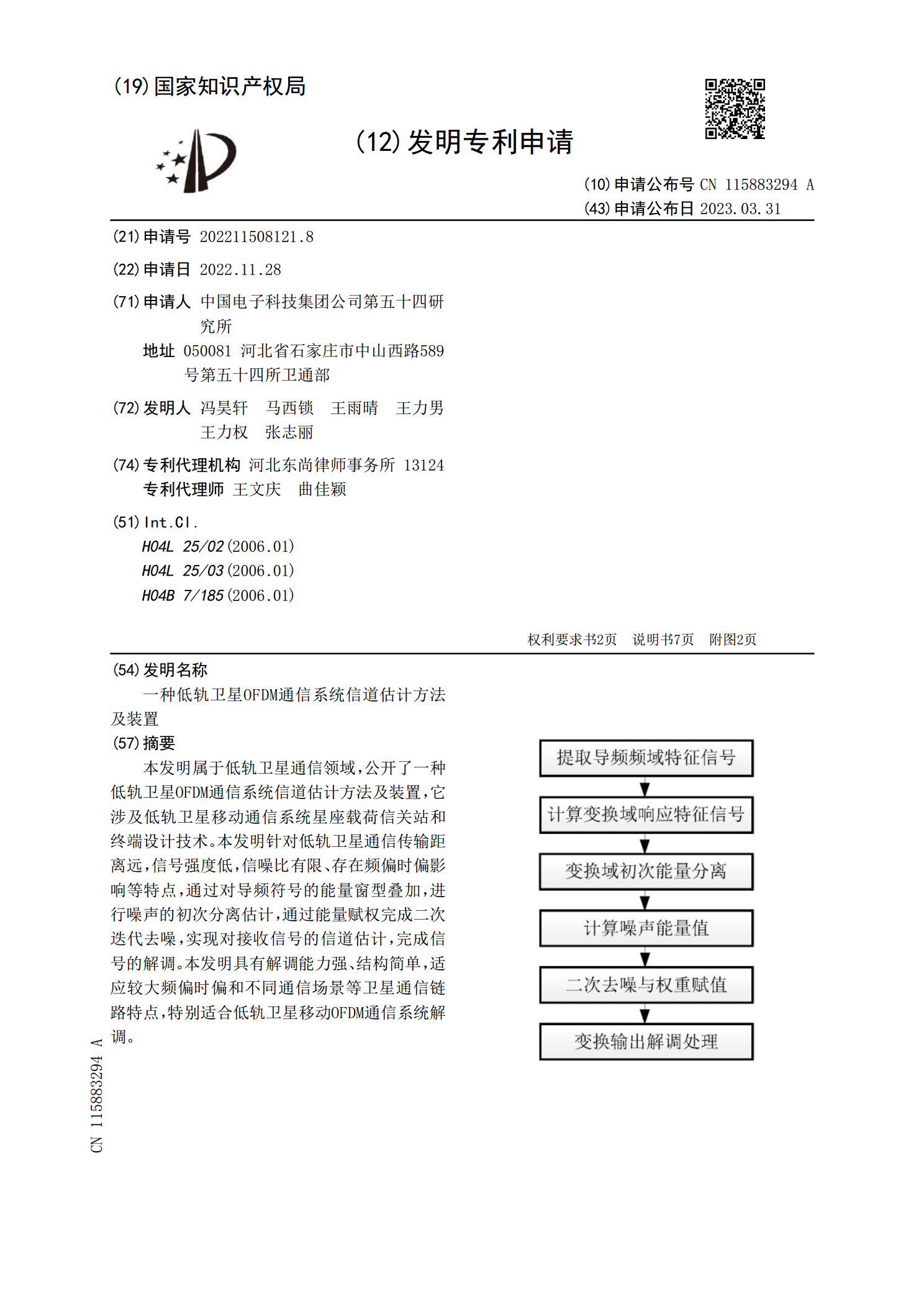
本发明属于低轨卫星通信领域,公开了一种低轨卫星OFDM通信系统信道估计方法及装置,它涉及低轨卫星移动通信系统星座载荷信关站和终端设计技术。本发明针对低轨卫星通信传输距离远,信号强度低,信噪比有限、存在频偏时偏影响等特点,通过对导频符号的能量窗型叠加,进行噪声的初次分离估计,通过能量赋权完成二次迭代去噪,实现对接收信号的信道估计,完成信号的解调。本发明具有解调能力强、结构简单,适应较大频偏时偏和不同通信场景等卫星通信链路特点,特别适合低轨卫星移动OFDM通信系统解调。

一种基于低轨卫星系统的快变信道估计方法.pdf
本发明公开了一种基于低轨卫星系统的快变信道估计方法,针对低轨卫星较大多普勒频移以及中继级联信道的时频双选特性,建立放大转发(AF,AmplifyForward)协议下级联信道的基扩展模型(BEM,BasisExpansionModel),分析了适用于BEM模型的信道估计算法。首先根据归一化多普勒频偏和信噪比来判断要选用的BEM模型,然后利用信道稀疏特性选取最小二乘算法(LS)和线性最小均方误差算法(LMMSE)估计模型系数。本发明能够利用基扩展模型减少快变信道的待估参数,结合信道稀疏性和自适应混合B

一种VDES系统中的低轨卫星的动态接入方法.pdf
本发明属于无线通信技术领域,具体涉及一种VDES系统中的低轨卫星的动态接入方法,包括以下步骤:根据上行信号的多普勒频移对船舶进行排序和编号;根据船舶的编号,依次对船舶进行低轨卫星的上行动态接入。与现有的直接竞争接入方法相比,本发明增加了根据多普勒频移值对船舶进行的排序,依据排序先对多普勒频移值小的船舶进行接入,这样可以降低系统的多普勒频移;本发明还增加了当船舶处于多颗低轨卫星覆盖范围内时,一颗低轨卫星接入失败就调整到另外一颗低轨卫星进行接入的动态调整,这样可以充分利用低轨卫星的空闲信道资源。因此本发明所公
一种适用于低轨卫星通信系统的信道估计方法及系统.pdf
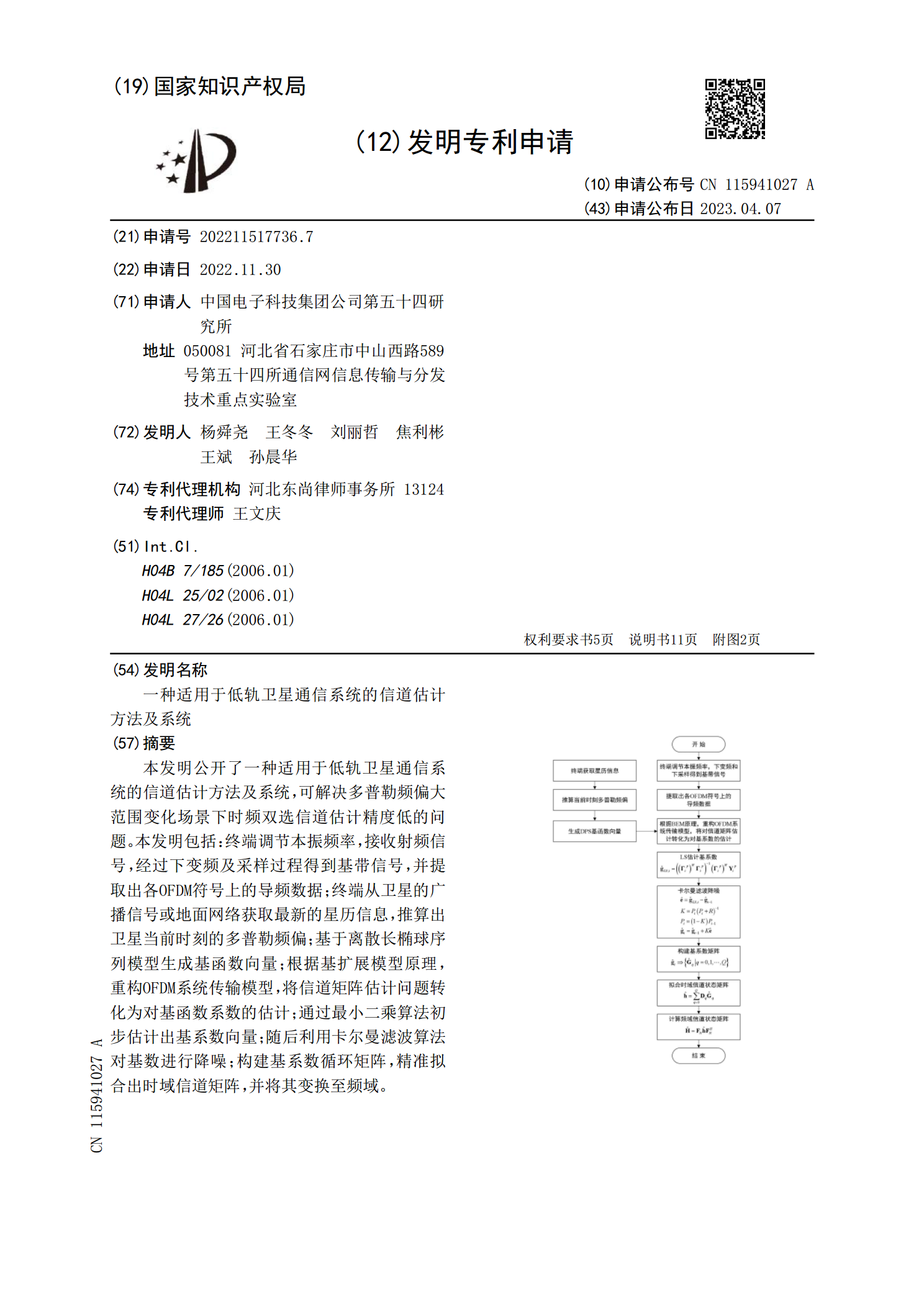
本发明公开了一种适用于低轨卫星通信系统的信道估计方法及系统,可解决多普勒频偏大范围变化场景下时频双选信道估计精度低的问题。本发明包括:终端调节本振频率,接收射频信号,经过下变频及采样过程得到基带信号,并提取出各OFDM符号上的导频数据;终端从卫星的广播信号或地面网络获取最新的星历信息,推算出卫星当前时刻的多普勒频偏;基于离散长椭球序列模型生成基函数向量;根据基扩展模型原理,重构OFDM系统传输模型,将信道矩阵估计问题转化为对基函数系数的估计;通过最小二乘算法初步估计出基系数向量;随后利用卡尔曼滤波算法对基