
基于星载SAR方位向NLCS成像的目标定位方法.pdf

一只****呀盟

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于星载SAR方位向NLCS成像的目标定位方法.pdf
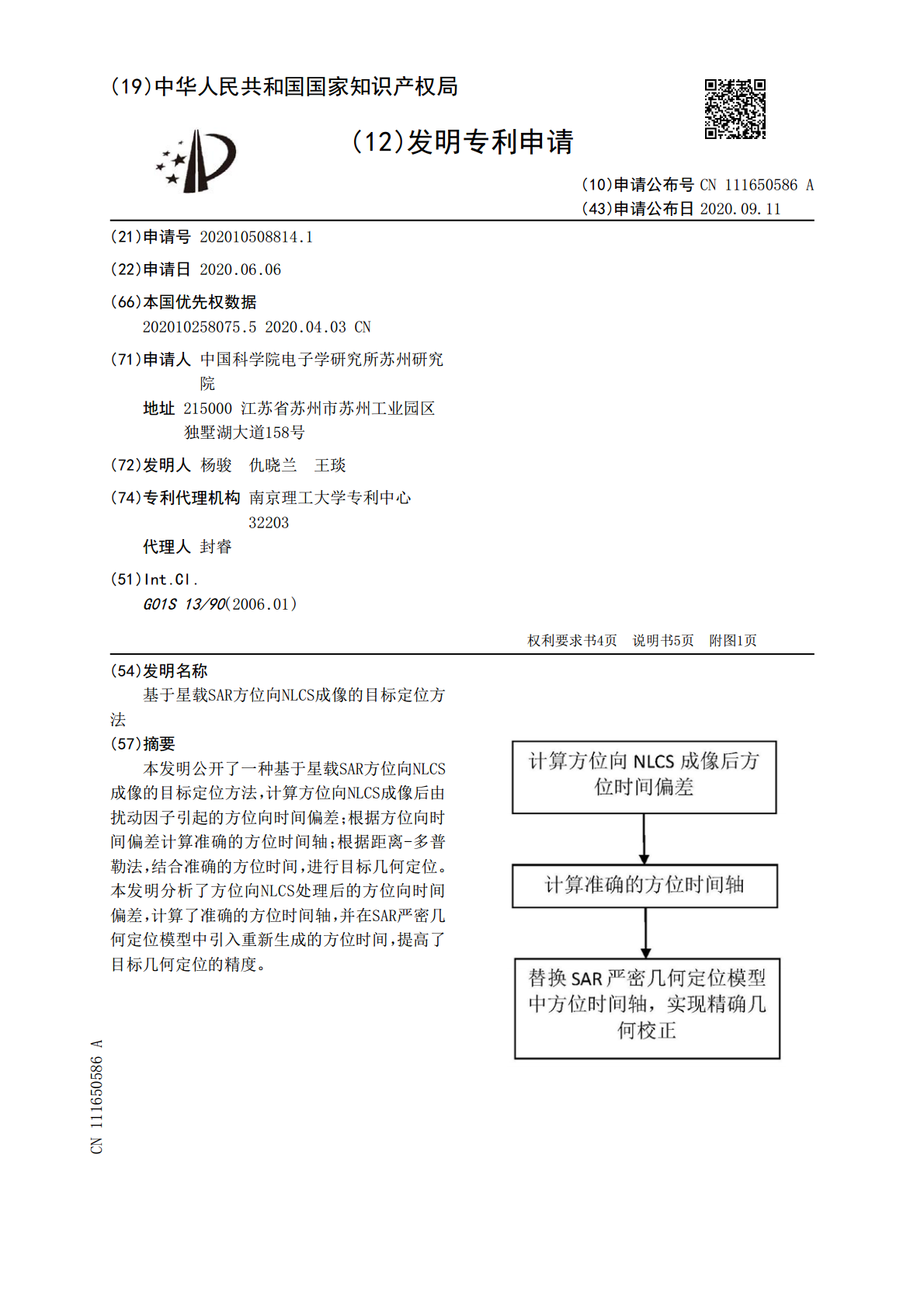
本发明公开了一种基于星载SAR方位向NLCS成像的目标定位方法,计算方位向NLCS成像后由扰动因子引起的方位向时间偏差;根据方位向时间偏差计算准确的方位时间轴;根据距离‑多普勒法,结合准确的方位时间,进行目标几何定位。本发明分析了方位向NLCS处理后的方位向时间偏差,计算了准确的方位时间轴,并在SAR严密几何定位模型中引入重新生成的方位时间,提高了目标几何定位的精度。

一种基于方位向多通道的星载SAR保相成像方法.pdf
本发明涉及一种基于方位向多通道的星载SAR保相成像方法,包括:获取星载SAR的多通道回波信号;将多通道回波信号转换到距离多普勒域,根据其与常规条带SAR回波信号的方位向频域关系构造补偿滤波器,对多通道回波信号进行滤波重构,使之转化为条带SAR回波信号;结合方位向多通道特性修正CS成像方法的相位补偿因子,并对重构后的SAR回波信号进行CS成像处理,得到图像。该保相成像方法可以不依赖DPCA条件成像,同时保证成像结果具有高相位精度。

斜视偏置相位中心方位多波束星载SAR 成像方法.pdf
本发明公开了一种斜视偏置相位中心方位多波束星载SAR成像方法,包括以下步骤:采用方位向相位补偿函数H1,n(f,t)分别对各方位波束接收的回波数据进行相应的相位补偿;采用方位重构滤波器组P(fa)对经相位补偿后的回波数据的多普勒频谱在距离-多普勒域内进行重建,并利用频谱还原函数H2(fr,t)恢复目标回波信号的多普勒历程;利用改进的RMA算法进行回波数据的聚焦成像。本发明通过方位预处理操作调整了回波信号的多普勒历程,解决了方位信号采样率不足的问题;并且通过斜视方位多波束信号重建,解决了方位多通道非均匀采样

基于方位向多通道的星载SAR Mosaic模式研究的任务书.docx
基于方位向多通道的星载SARMosaic模式研究的任务书一、背景合成孔径雷达(SAR)是一种利用微波辐射技术进行远距离成像的技术。随着科技的不断进步,SAR技术得到广泛应用,如着陆探测、地形地貌监测、海洋监测、军事侦察、环境监测等领域。SAR在地球科学和探测领域中一直是非常重要的工具和技术。海洋观测合成孔径雷达对于海洋环境的监测和探测非常重要,而星载SAR技术具有高覆盖性、实时性、高分辨率等优点,成为海洋监测的首选技术之一。多通道是SAR技术的一个重要应用方向,目前多通道SAR系统的研究和应用十分广泛,其
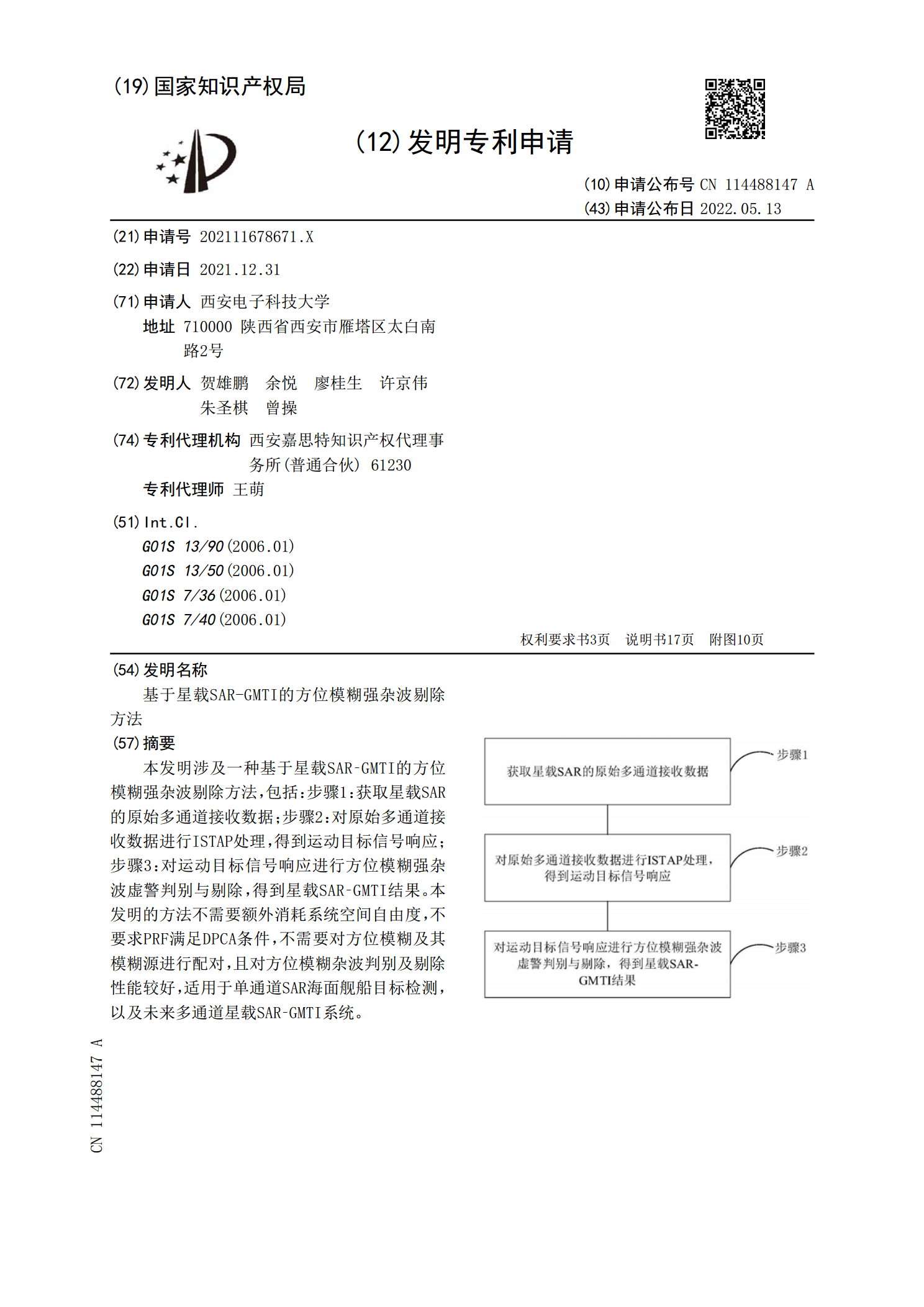
基于星载SAR-GMTI的方位模糊强杂波剔除方法.pdf
本发明涉及一种基于星载SAR?GMTI的方位模糊强杂波剔除方法,包括:步骤1:获取星载SAR的原始多通道接收数据;步骤2:对原始多通道接收数据进行ISTAP处理,得到运动目标信号响应;步骤3:对运动目标信号响应进行方位模糊强杂波虚警判别与剔除,得到星载SAR?GMTI结果。本发明的方法不需要额外消耗系统空间自由度,不要求PRF满足DPCA条件,不需要对方位模糊及其模糊源进行配对,且对方位模糊杂波判别及剔除性能较好,适用于单通道SAR海面舰船目标检测,以及未来多通道星载SAR?GMTI系统。