
一种仅用距离观测的机动转弯目标状态估计方法.pdf

萌运****魔王

1/10
2/10

3/10

4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仅用距离观测的机动转弯目标状态估计方法.pdf
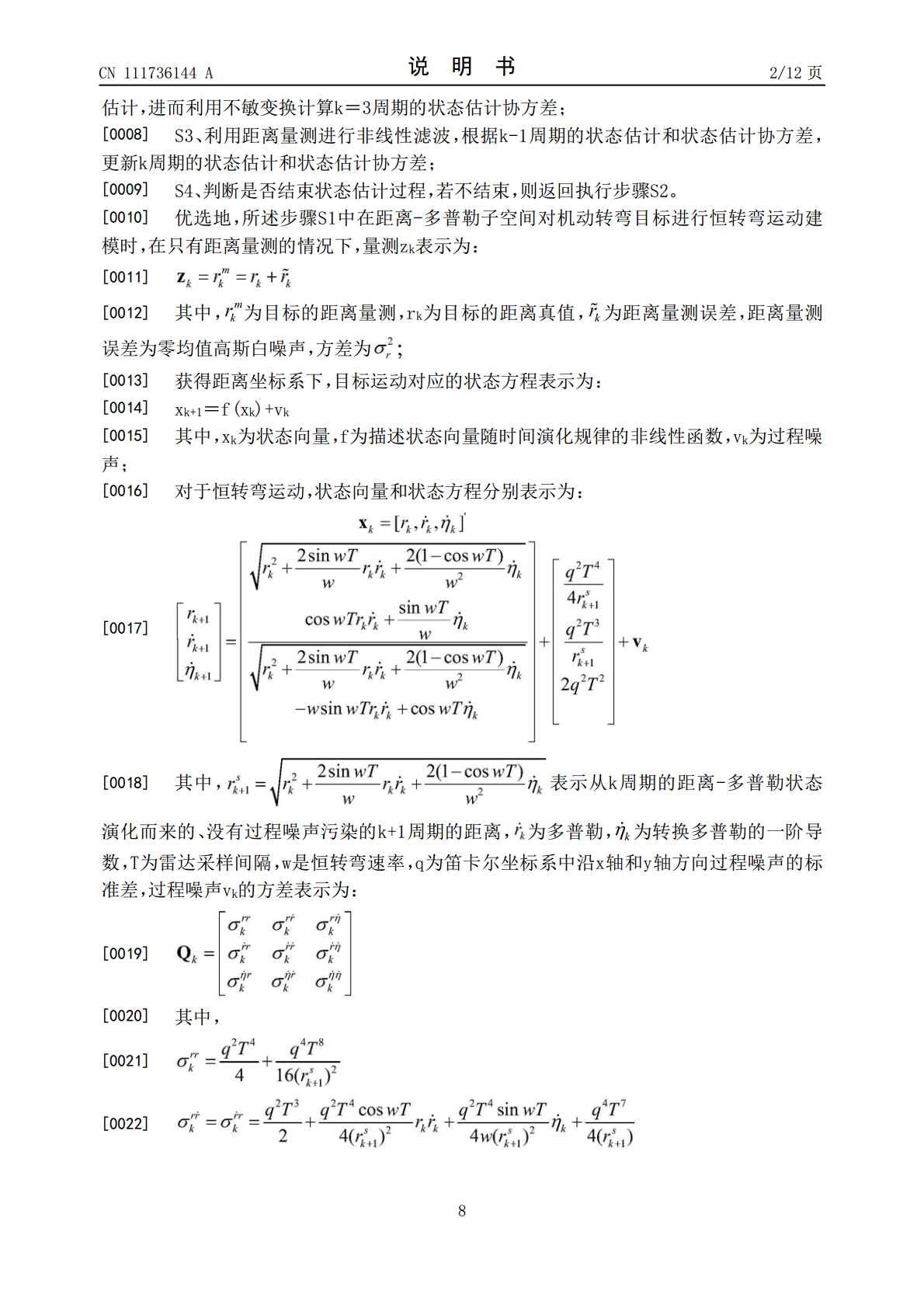
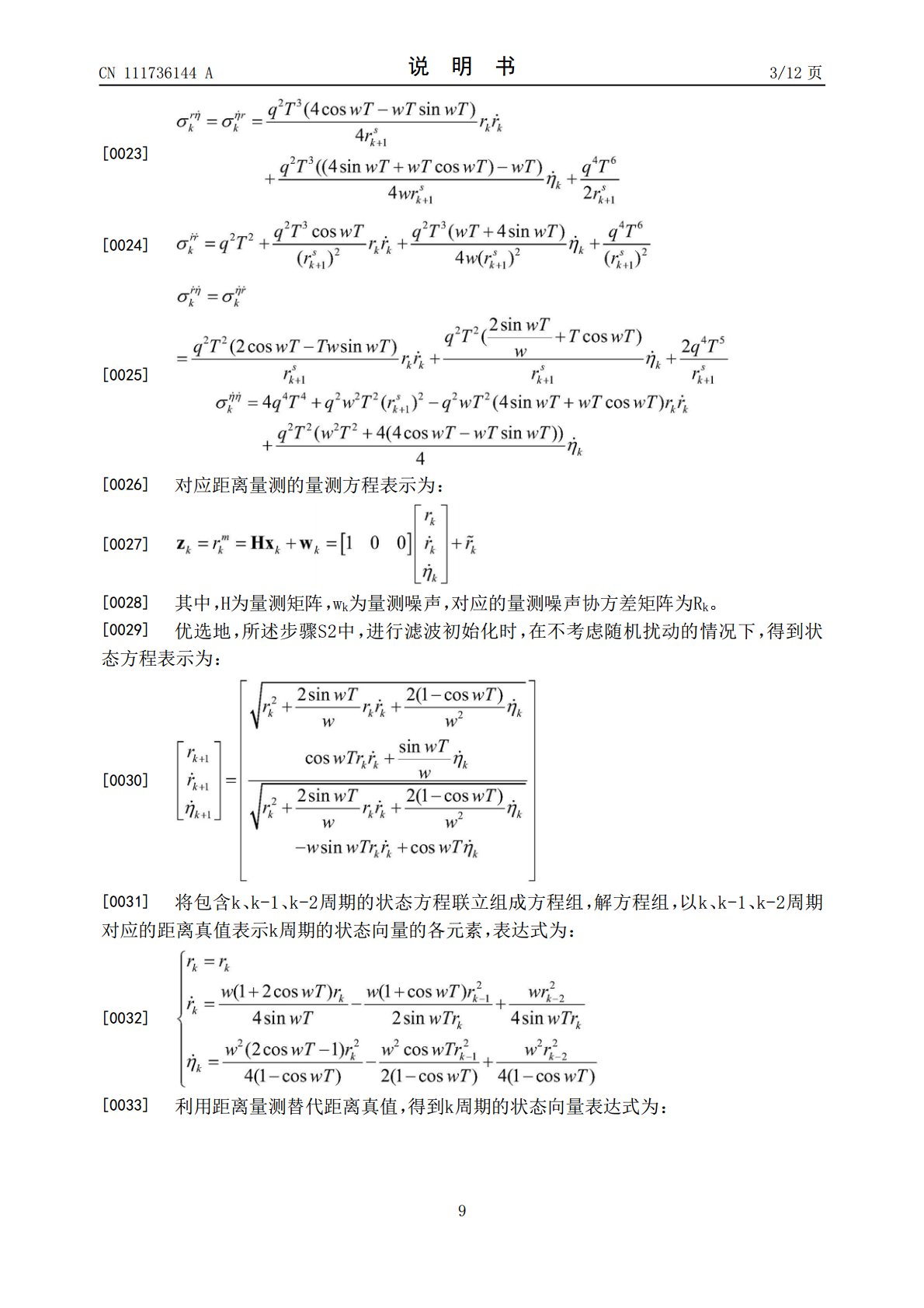
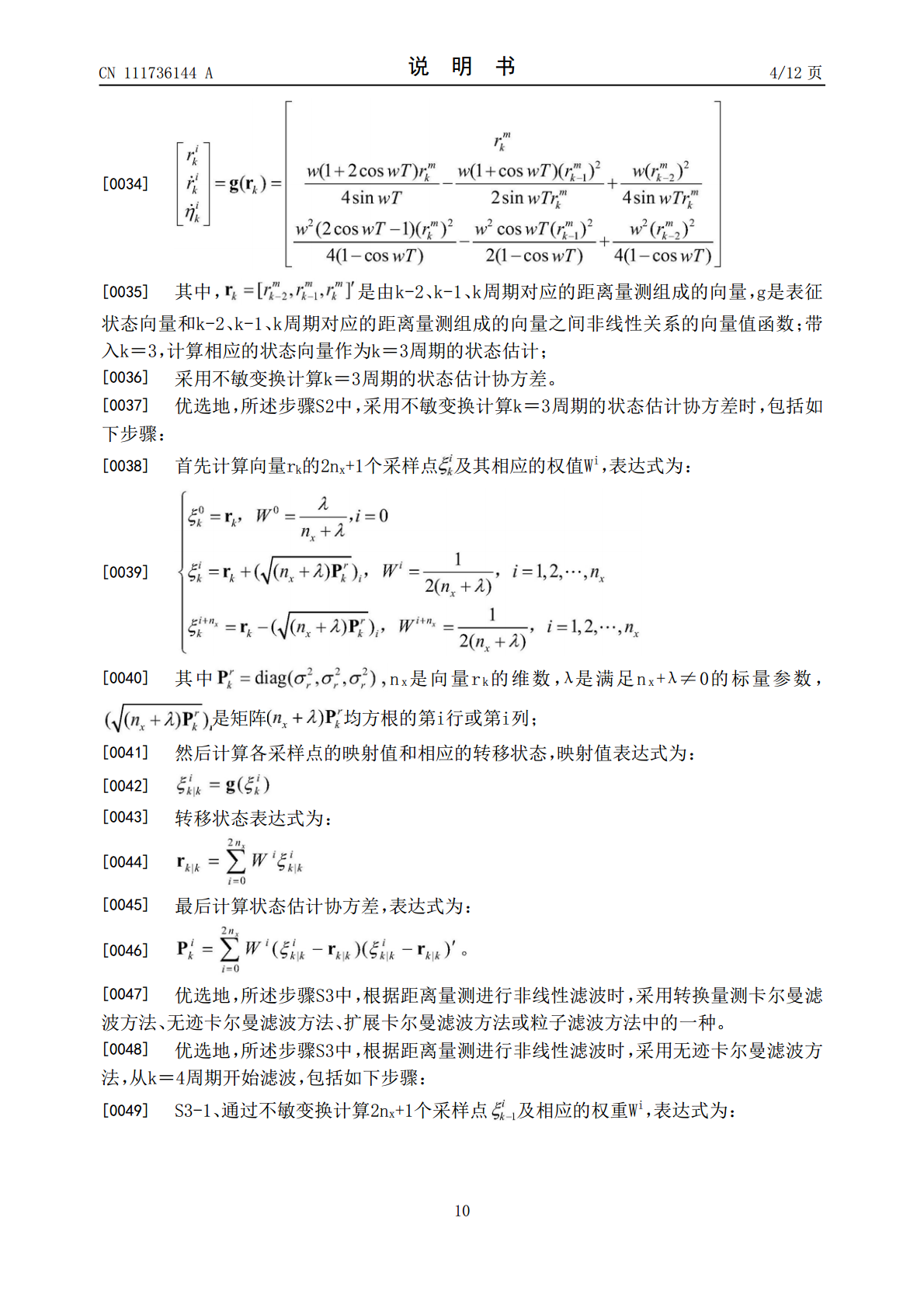
本发明涉及一种仅用距离观测的机动转弯目标状态估计方法、计算机设备及计算机可读存储介质,该方法包括:在距离‑多普勒子空间对机动转弯目标进行恒转弯运动建模,获得距离坐标系下的状态方程及对应距离量测的量测方程;从雷达处获取距离量测,若当前跟踪的周期k≤3,则利用基于恒转弯运动模型的初始化方法进行滤波初始化,若当前跟踪的周期k>3则跳过滤波初始化;利用距离量测进行非线性滤波,根据k‑1周期的状态估计和状态估计协方差,更新k周期的状态估计和状态估计协方差;判断是否结束状态估计过程。本发明能够针对不含角度量测和
一种基于交互式多模型无色滤波的机动目标状态估计方法.pdf
本发明公开了一种基于交互式多模型无色滤波的机动目标状态估计方法。该方法利用无色卡尔曼滤波(UKF)处理运动模型的非线性问题,同时结合交互式多模型滤波(IMMF)及信息滤波(IF),实现了一种线性化误差小、估计精度高、计算复杂度低的不确定信息条件下的目标状态估计。

一种估计机动目标运动参数的方法.docx
一种估计机动目标运动参数的方法标题:基于Kalman滤波的机动目标运动参数估计方法摘要:估计机动目标的运动参数在目标跟踪、运动预测以及行为分析等领域具有重要的应用价值。本文提出了一种基于Kalman滤波的机动目标运动参数估计方法。该方法通过结合目标动态模型和观测信息,利用Kalman滤波算法实现对目标位置、速度和加速度等运动参数的精确估计。实验结果表明,所提出的方法能够有效地提高目标运动参数的估计精度。关键词:机动目标、运动参数、估计方法、Kalman滤波1.引言机动目标的运动参数估计是目标跟踪、运动预测

一种抗观测数据干扰的多车协同状态估计方法.pdf
本发明公开了一种抗观测数据干扰的多车协同状态估计方法,主车、协同车分别对目标车进行感知,获得含有异常噪声的目标车状态观测数据。主车作为信息融合中心,对收集到的观测数据进行预处理,得到组合观测数据。基于学生t分布模拟重尾、非高斯的观测噪声可有效抑制异常噪声的影响;初始化状态变量、观测噪声协方差的先验超参数和调节参数;利用变分推断,计算第t次迭代后目标车状态的变分后验分布和观测噪声的变分后验分布;判断目标车状态是否收敛,直至收敛后输出当前时刻k估计的目标车状态;跟踪结束后,输出本次跟踪位置和速度的均方根误差图

一种机动转弯目标相参积累检测方法.pdf
本发明涉及一种机动转弯目标相参积累检测方法,包括:接收雷达回波信号并进行解调和脉冲压缩处理;设置搜索参数离散化数值;遍历所有搜索参数相应的搜索范围,对每一组搜索参数,根据机动转弯目标的精确距离演化方程确定搜索轨迹,抽取目标数据,利用精确距离演化方程补偿不同脉冲间的相位波动并对补偿后的数据矢量相加,直至完成所有搜索参数的积累输出,获得相参积累输出矩阵;利用相参积累输出矩阵进行恒虚警率检测,判断是否检测到目标;若判断检测到目标,则根据目标的尖峰位置坐标,估计目标运动参数,并输出目标运动点迹。本发明能够消除目标