
复杂杂波背景下检测低慢小目标的雷达信号处理方法.pdf

小宏****aa


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

复杂杂波背景下检测低慢小目标的雷达信号处理方法.pdf
本发明提供了一种复杂杂波背景下检测低慢小目标的雷达信号处理方法,包括:对采样的动目标回波脉冲序列的每一距离单元内的慢时间数据序列进行谱分析获得多普勒域数据;对多普勒域数据进行滑窗处理且获取每个参考窗中统计方差、统计均值,以及前后两个参考窗的统计均值比;根据统计方差和统计均值判断每个参考窗内背景杂波的均匀性;根据背景杂波的均匀性选择对应的恒虚警检测算法获取参考窗内目标点迹;根据点迹信息获取目标的速度、俯仰、方位、距离。
基于四维稳态杂波图的强杂波背景下低慢小目标检测方法.pdf
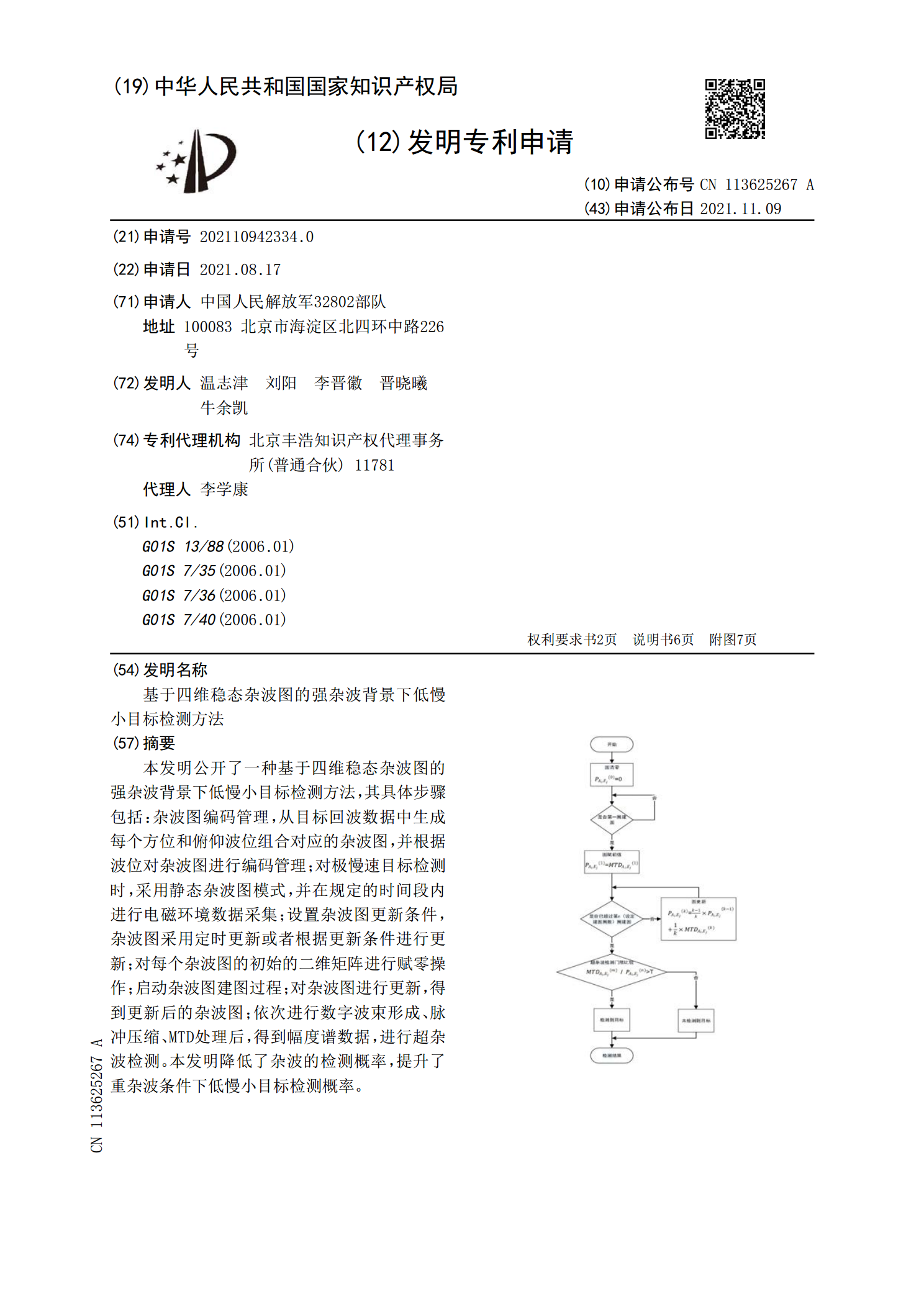
本发明公开了一种基于四维稳态杂波图的强杂波背景下低慢小目标检测方法,其具体步骤包括:杂波图编码管理,从目标回波数据中生成每个方位和俯仰波位组合对应的杂波图,并根据波位对杂波图进行编码管理;对极慢速目标检测时,采用静态杂波图模式,并在规定的时间段内进行电磁环境数据采集;设置杂波图更新条件,杂波图采用定时更新或者根据更新条件进行更新;对每个杂波图的初始的二维矩阵进行赋零操作;启动杂波图建图过程;对杂波图进行更新,得到更新后的杂波图;依次进行数字波束形成、脉冲压缩、MTD处理后,得到幅度谱数据,进行超杂波检测。

复杂动背景下的“低小慢”目标检测技术.docx
复杂动背景下的“低小慢”目标检测技术复杂动背景下的“低小慢”目标检测技术摘要:目标检测是计算机视觉中的一个重要任务,其在实际应用中面临着许多挑战,尤其是在复杂动态背景下。本文提出了一种基于“低小慢”策略的目标检测技术,通过对目标的低光照、小尺寸和慢动作进行建模和检测,提高了目标检测的准确性和鲁棒性。1.引言目标检测是计算机视觉领域的一个基础问题,其在安全监控、智能驾驶和机器人导航等领域具有广泛的应用。然而,在复杂动态背景下进行目标检测是一个具有挑战性的任务,因为背景的变化往往会干扰目标的检测。因此,我们提

从杂波背景中识别船舶目标的信号处理方法.docx
从杂波背景中识别船舶目标的信号处理方法作为一种重要的海上交通航行工具,船舶在海上行驶时需要面对许多挑战,其中之一就是准确识别周围的船舶目标。在大海的广阔空间内,往往存在大量的杂波背景,这给船舶目标的识别带来了非常大的挑战。为了解决这一问题,必须采用高效的信号处理方法,以便更准确地从背景杂波中识别船舶目标。船舶目标信号处理方法的一般流程船舶目标的信号处理方法通常需要通过一系列步骤来实现。首先,需要对接收到的信号进行预处理,以消除信噪比低、杂波干扰等问题,以便更好地识别船舶目标。接着,需要采用合适的特征提取方

复杂背景下“低小慢”目标检测技术研究.docx
复杂背景下“低小慢”目标检测技术研究复杂背景下“低小慢”目标检测技术研究摘要:目标检测是计算机视觉领域的一个重要研究方向。在复杂背景下进行目标检测是一个具有挑战性的问题。本文提出了一种“低小慢”目标检测技术,通过降低计算复杂度、处理小目标和增加检测时延三个方面来实现高效准确的目标检测。实验结果表明,“低小慢”目标检测技术在处理复杂背景下的目标检测任务上具有较好的性能。关键词:目标检测,复杂背景,计算复杂度,小目标,检测时延1.引言目标检测是计算机视觉和图像处理领域的一个热门研究方向。在现实世界中,我们常常