
一种复杂干扰场景下的机载雷达无意干扰抑制方法.pdf

文宣****66

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种复杂干扰场景下的机载雷达无意干扰抑制方法.pdf
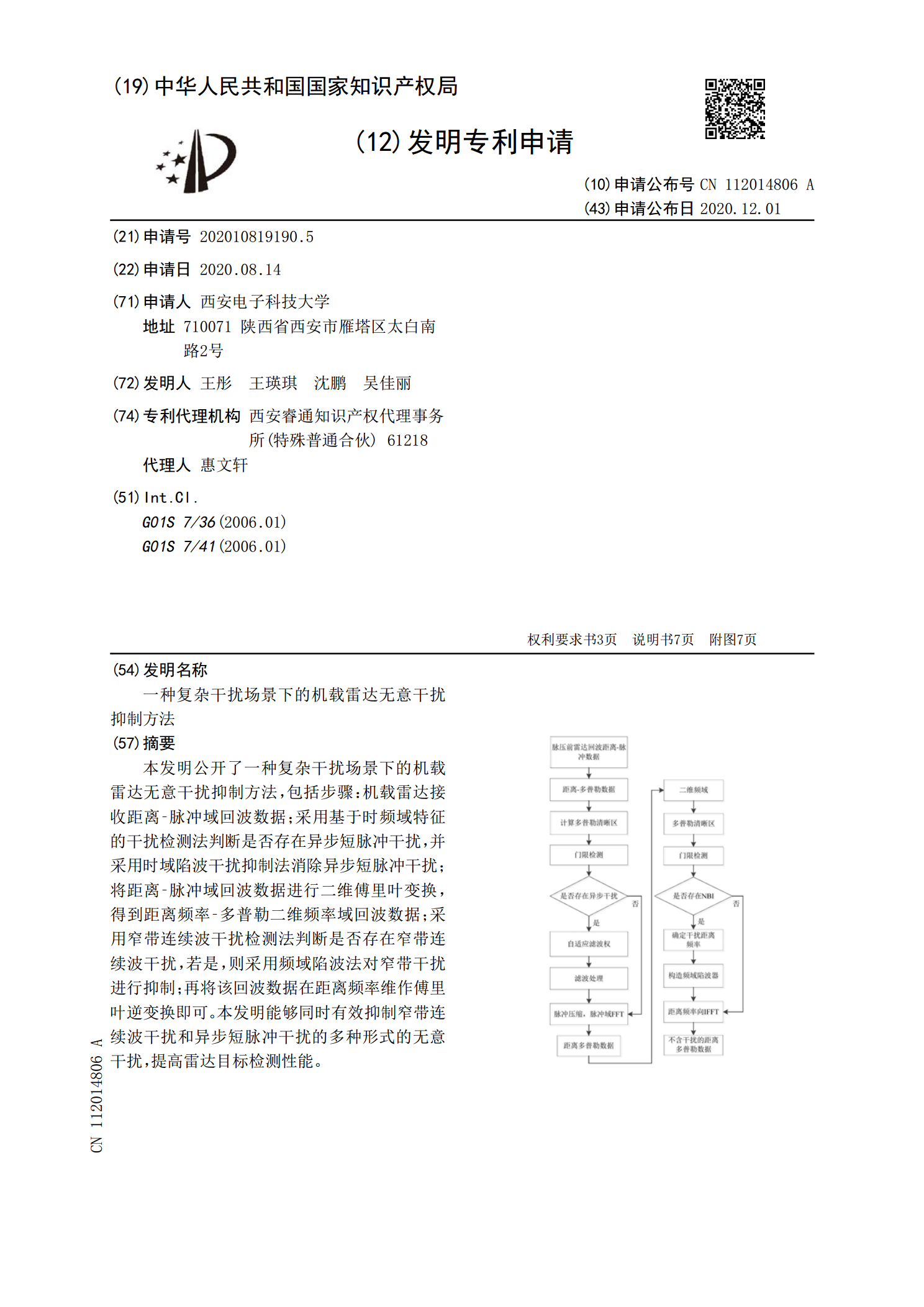
本发明公开了一种复杂干扰场景下的机载雷达无意干扰抑制方法,包括步骤:机载雷达接收距离‑脉冲域回波数据;采用基于时频域特征的干扰检测法判断是否存在异步短脉冲干扰,并采用时域陷波干扰抑制法消除异步短脉冲干扰;将距离‑脉冲域回波数据进行二维傅里叶变换,得到距离频率‑多普勒二维频率域回波数据;采用窄带连续波干扰检测法判断是否存在窄带连续波干扰,若是,则采用频域陷波法对窄带干扰进行抑制;再将该回波数据在距离频率维作傅里叶逆变换即可。本发明能够同时有效抑制窄带连续波干扰和异步短脉冲干扰的多种形式的无意干扰,提高雷达目
一种杂波背景下对机载雷达的有源压制式干扰抑制方法.pdf
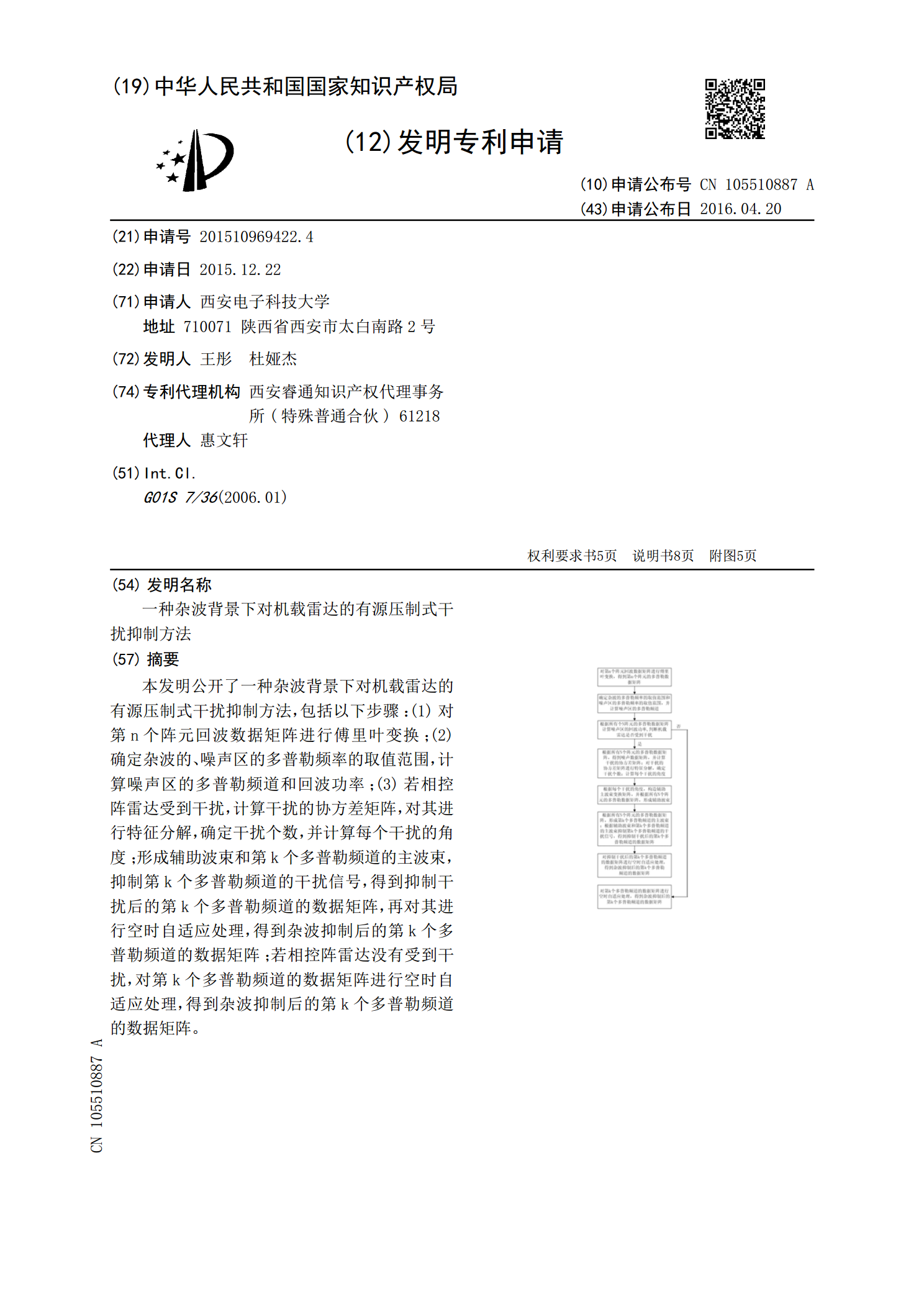
本发明公开了一种杂波背景下对机载雷达的有源压制式干扰抑制方法,包括以下步骤:(1)对第n个阵元回波数据矩阵进行傅里叶变换;(2)确定杂波的、噪声区的多普勒频率的取值范围,计算噪声区的多普勒频道和回波功率;(3)若相控阵雷达受到干扰,计算干扰的协方差矩阵,对其进行特征分解,确定干扰个数,并计算每个干扰的角度;形成辅助波束和第k个多普勒频道的主波束,抑制第k个多普勒频道的干扰信号,得到抑制干扰后的第k个多普勒频道的数据矩阵,再对其进行空时自适应处理,得到杂波抑制后的第k个多普勒频道的数据矩阵;若相控阵雷达没有

共形阵天线机载雷达杂波和干扰抑制方法研究.docx
共形阵天线机载雷达杂波和干扰抑制方法研究共形阵天线机载雷达是一种应用于航空领域的雷达系统。由于其特殊的设计和工作环境,会面临雷达杂波和干扰的问题。因此,研究共形阵天线机载雷达的杂波和干扰抑制方法,对于提高其性能和可靠性具有重要的意义。本论文将对共形阵天线机载雷达杂波和干扰抑制方法进行研究,并提出一些可行的解决方案。首先,我们需要了解共形阵天线机载雷达系统的基本原理和工作原理。共形阵天线是指由多个共面小天线组合而成的一种天线结构。它可以通过调整天线元件之间的相位和幅度来实现波束的控制和定向。由于其紧凑的结构

基于快时间序列STAP的机载阵列雷达主瓣干扰抑制方法.pptx
,CONTENTS01.信号处理原理空间平滑处理权重计算方法干扰抑制原理02.快时间序列STAP算法概述快时间序列STAP算法流程快时间序列STAP算法特点快时间序列STAP算法优势03.主瓣干扰产生原因主瓣干扰抑制方法概述基于快时间序列STAP的主瓣干扰抑制方法主瓣干扰抑制效果评估04.算法实现流程实验验证方法实验验证结果结果分析05.算法优化方向算法改进措施优化与改进效果评估未来研究方向感谢您的观看!

一种改进的机载雷达抗副瓣干扰方法.pptx
一种改进的机载雷达抗副瓣干扰方法目录添加目录项标题雷达抗副瓣干扰概述副瓣干扰的来源副瓣干扰对雷达的影响传统抗副瓣干扰方法改进的机载雷达抗副瓣干扰方法介绍方法原理技术实现流程关键技术点改进方法的优势与效果优势分析实验效果验证与传统方法的比较应用场景与适用范围应用场景适用范围限制与注意事项未来研究方向与展望当前研究的不足之处未来研究方向对行业的推动作用感谢观看