
基于跟踪信息的相位编码信号的多普勒补偿方法.pdf

雨巷****珺琦


1/9

2/9
3/9

4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于跟踪信息的相位编码信号的多普勒补偿方法.pdf
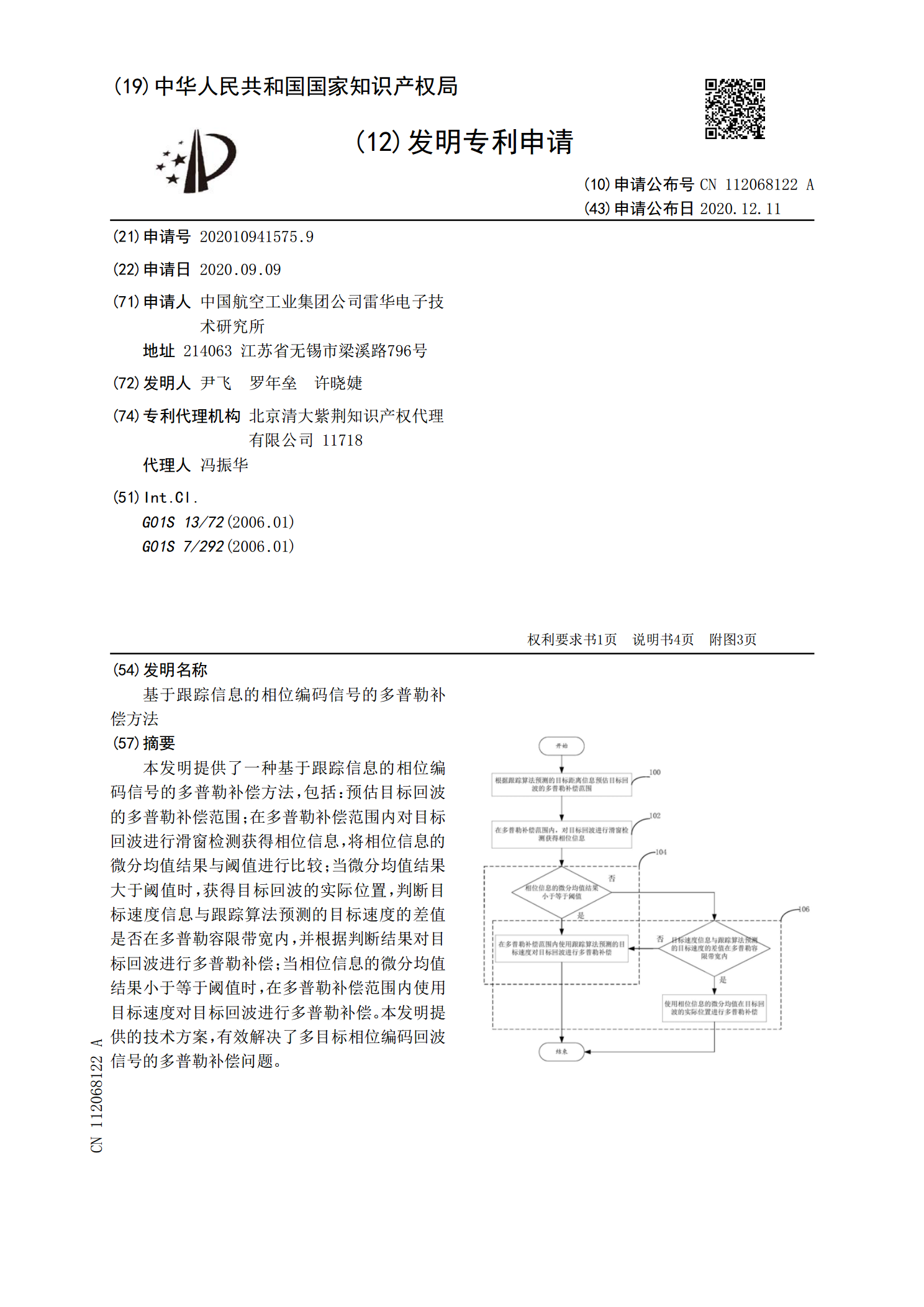
本发明提供了一种基于跟踪信息的相位编码信号的多普勒补偿方法,包括:预估目标回波的多普勒补偿范围;在多普勒补偿范围内对目标回波进行滑窗检测获得相位信息,将相位信息的微分均值结果与阈值进行比较;当微分均值结果大于阈值时,获得目标回波的实际位置,判断目标速度信息与跟踪算法预测的目标速度的差值是否在多普勒容限带宽内,并根据判断结果对目标回波进行多普勒补偿;当相位信息的微分均值结果小于等于阈值时,在多普勒补偿范围内使用目标速度对目标回波进行多普勒补偿。本发明提供的技术方案,有效解决了多目标相位编码回波信号的多普勒补

跟踪雷达相位编码信号的多普勒补偿方法.pdf
本发明提供了一种跟踪雷达相位编码信号的多普勒补偿方法,起使用数据处理给出的目标多普勒信息,读取数字NCO中的点频信号,并在系统时序控制下,产生相应的多普勒补偿信号,即消除脉内多普勒信息,又保留了脉间多普勒信息,从根本上解决了相位编码信号的多普勒敏感问题。本发明具有设计简单、可靠性高、容易实现的特点,并具有一定的通用性,可广泛应用于类似的跟踪雷达信号处理系统中。
一种改进的相位编码信号多普勒补偿方法.docx
一种改进的相位编码信号多普勒补偿方法张军杰张涛陈新峰摘要:针对相位编码信号多普勒频率敏感以及越距离单元走动问题,本文提出一种改进的多普勒频率补偿方法,该方法通过预设模糊重数,对回波信号进行多普勒补偿及Keystone变换处理,实现目标回波信号的有效相参积累及速度解模糊。采用回波仿真数据进行实验,实验结果验证了本方法的有效性。关键词:相位编码信号;多普勒频率;Keystone变换;相参积累:TN957.51:A:1007-9416(2019)01-0086-030引言二相编码信号是一种相位编码信号,在雷达领

一种改进的相位编码信号多普勒补偿方法.docx
一种改进的相位编码信号多普勒补偿方法相位编码信号多普勒补偿方法随着人类对空间的探索日渐深入,高精度的空间测量技术在越来越多的领域得到应用,如卫星导航、遥感测绘、航空航天等。在空间测量中,多普勒效应是一个重要的影响因素,它会导致测量误差,在某些情况下,甚至会影响到所做的测量。因此,对多普勒效应进行精确的补偿是空间测量领域中的研究热点之一。相位编码信号多普勒补偿方法便是其中的一种。一、相位编码信号的基本概念相位编码信号是一种基于周期性相位差的信号,采用一组不同频率的余弦信号将数据编码成相位差来进行传输。具体来

利用水声连续信号动态多普勒跟踪实现的相位补偿方法.pdf
利用水声连续信号动态多普勒跟踪实现的相位补偿方法,属于水下无线通信及其信号处理领域。解决了现有的采用多普勒跟踪进行相位补偿的方法,接收端信息同步不准确,无法准确获取有效信息,以及通信过程中频带利用率低的问题。本发明将接收信号与本地复通带参考信号进行相关处理,获得通带相关信号;对其获得的通带相关信号进行逐符号的多普勒估计;该多普勒的估计值用于补偿接收信号的相位偏移以及生成新的本地复通带参考信号,作为下一处理单元的参考信号,以补偿动态多普勒引入的幅度衰减。本发明主要适用于动态多普勒场景下的水声扩频通信系统。