
固体运载火箭耗尽关机模式下的惯性落点控制闭环制导方法.pdf

雨星****萌娃


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

固体运载火箭耗尽关机模式下的惯性落点控制闭环制导方法.pdf
本发明涉及一种固体运载火箭耗尽关机模式下的惯性落点控制闭环制导方法,根据瞬时轨道落点的微分导数关系,推导出自由飞行过程瞬时轨道落点相关导数的解析解,从而建立了当前点与轨道落点之间的映射关系。根据当前固体运载火箭剩余飞行时间确定当前加速度指令矢量,保证固体运载火箭发动机耗尽关机时瞬时轨道落点移动到目标点,运载火箭继续沿开普勒轨道滑行至目标落点,同时该发明具有很高的制导精度。

姿态角单次调整的固体运载火箭耗尽关机能量管理方法.docx
姿态角单次调整的固体运载火箭耗尽关机能量管理方法摘要随着航天技术的不断发展和进步,国际上越来越多的国家开始投入大量资源和精力进行航天工程。其中,固体运载火箭的作用不可忽视,其发射过程中姿态角的单次调整对火箭飞行起着至关重要的作用。然而,在这个过程中,火箭需要耗尽大量的关机能量来管理其姿态角。本文将探讨这个问题,并提出一些解决方案。引言近年来,随着航天技术的不断发展和深入,越来越多的国家开始着手开展航天工程。其中,固体运载火箭是一种基础型的运载工具,在航天领域中起着至关重要的作用。在火箭发射过程中,姿态角的

基于摄动制导的运载火箭一子级落点控制.docx
基于摄动制导的运载火箭一子级落点控制基于摄动制导的运载火箭一子级落点控制摘要:运载火箭是航天器发射的重要工具,而其落点的精确控制则是保证航天器能够顺利进入预定轨道的关键。本论文基于摄动制导的理论和方法,研究了运载火箭一子级的落点控制问题。首先,对运载火箭的发射过程进行建模,确定了影响落点的各种摄动源,并通过数值仿真的方法进行分析。然后,设计了一种基于摄动制导的控制策略,以实现对运载火箭一子级的落点进行精确控制。最后,通过实验验证了本文提出的控制策略的有效性和可行性。关键词:摄动制导、运载火箭、一子级、落点
一种固体运载火箭大气层外制导控制方法.pdf
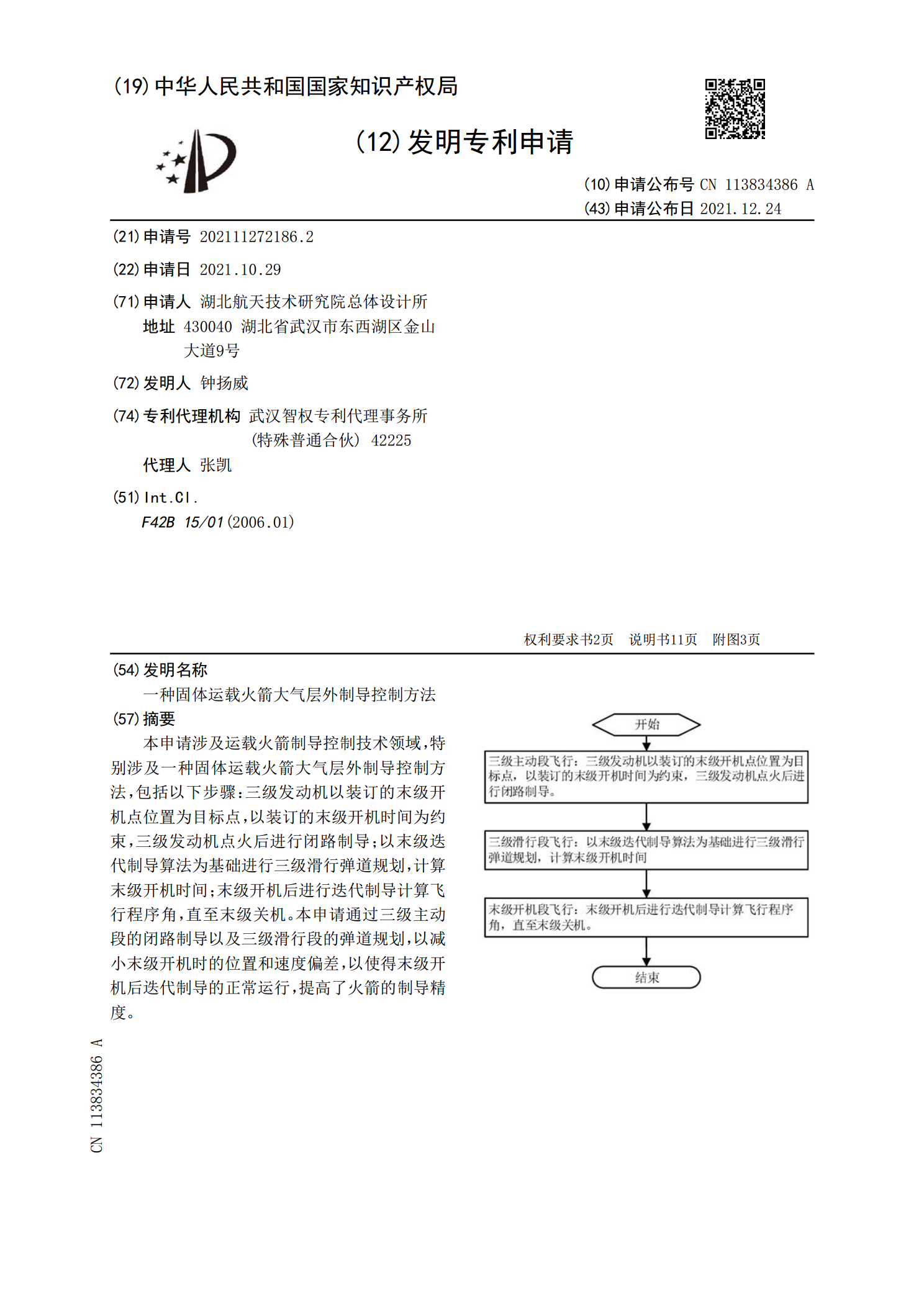
本申请涉及运载火箭制导控制技术领域,特别涉及一种固体运载火箭大气层外制导控制方法,包括以下步骤:三级发动机以装订的末级开机点位置为目标点,以装订的末级开机时间为约束,三级发动机点火后进行闭路制导;以末级迭代制导算法为基础进行三级滑行弹道规划,计算末级开机时间;末级开机后进行迭代制导计算飞行程序角,直至末级关机。本申请通过三级主动段的闭路制导以及三级滑行段的弹道规划,以减小末级开机时的位置和速度偏差,以使得末级开机后迭代制导的正常运行,提高了火箭的制导精度。

基于修正牛顿迭代的固体运载火箭末修级制导方法.pptx
基于修正牛顿迭代的固体运载火箭末修级制导方法目录添加目录项标题修正牛顿迭代算法修正牛顿迭代算法的基本原理修正牛顿迭代算法在固体运载火箭末修级制导中的应用修正牛顿迭代算法的优势和局限性固体运载火箭末修级制导系统固体运载火箭末修级制导系统的组成和功能末修级制导系统的主要技术指标末修级制导系统的工作流程和原理基于修正牛顿迭代的末修级制导方法实现修正牛顿迭代算法在末修级制导中的具体应用步骤算法实现的关键技术和难点算法实现的效果和性能评估实验验证和结果分析实验环境和条件实验过程和结果结果分析和讨论结论和展望基于修正