
基于稀疏谱恢复的机载三维异构阵杂波抑制方法.pdf

努力****元恺


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于稀疏谱恢复的机载三维异构阵杂波抑制方法.pdf
本发明公开了一种基于稀疏谱恢复的机载三维异构阵杂波抑制方法,包括步骤:建立机载三维异构阵的几何模型,并获取机载三维异构阵接收的杂波模型;建立对应的完备字典矩阵;通过压缩感知算法进行杂波谱恢复,再引入联合稀疏模型,对恢复的杂波空时谱进行优化;通过协方差矩阵和杂波分布特性间的等价关系,估计协方差矩阵,进而构造相应的自适应滤波器。本发明将稀疏恢复模型引入到机载三维异构阵的杂波抑制,在正确构建压缩感知模型后,稀疏恢复的过程则是单纯的角度、多普勒求解问题,并不会受到杂波的空变影响,十分契合机载三维异构阵的杂波抑制。

基于盲源分离的机载三维异构阵杂波与干扰抑制方法.pdf
本发明属于信号处理技术领域,公开一种基于盲源分离的机载三维异构阵杂波与干扰抑制方法,包括以下步骤:设空间中存在目标回波s(t)、杂波c(t)与干扰j(t),且同时进入到机载三维异构阵的阵元当中,设目标信号为远场窄带信号,则接收信号为X;根据接收信号X求取相关矩阵R,对相关矩阵R进行特征值分解R=UΛU
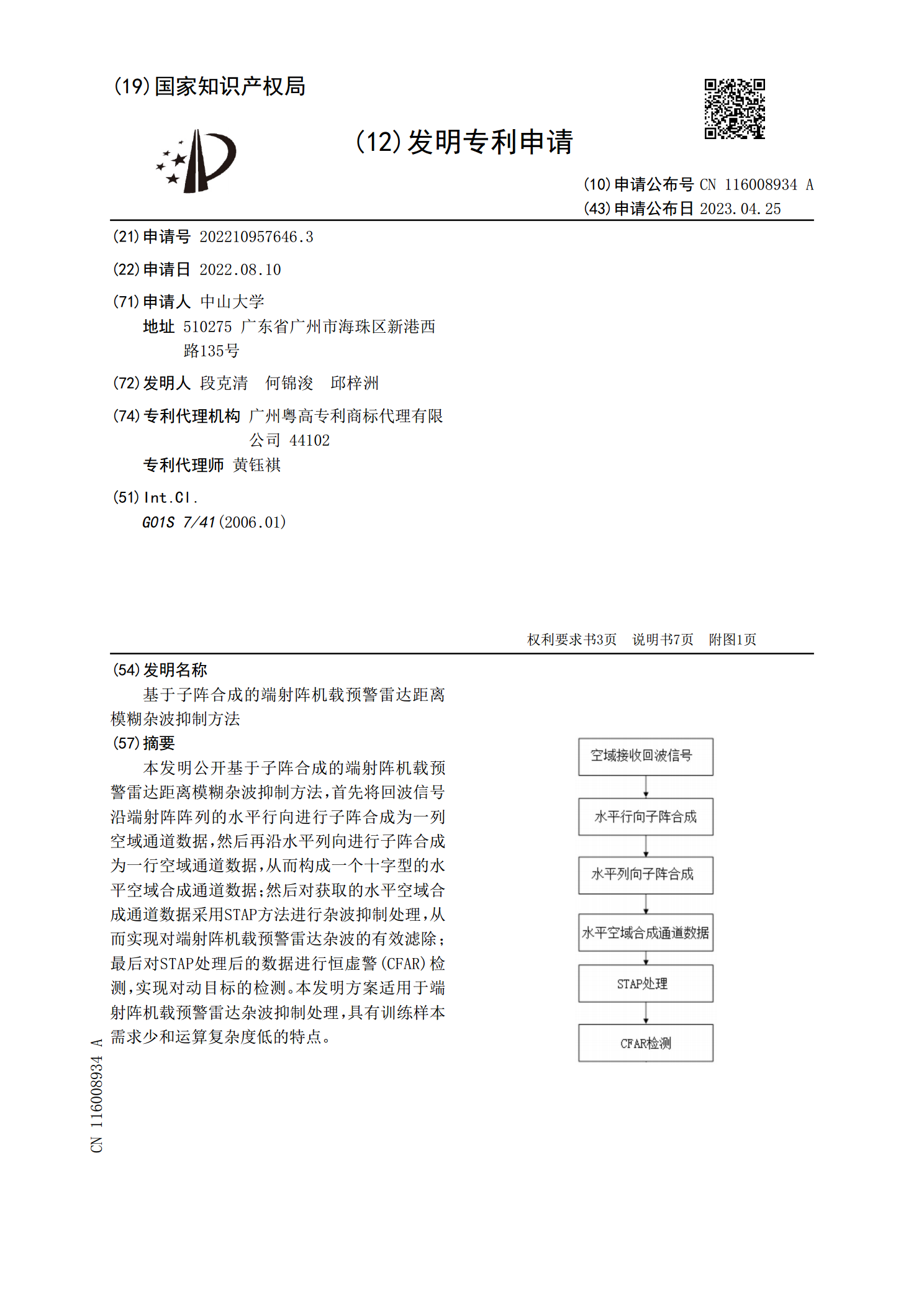
基于子阵合成的端射阵机载预警雷达距离模糊杂波抑制方法.pdf
本发明公开基于子阵合成的端射阵机载预警雷达距离模糊杂波抑制方法,首先将回波信号沿端射阵阵列的水平行向进行子阵合成为一列空域通道数据,然后再沿水平列向进行子阵合成为一行空域通道数据,从而构成一个十字型的水平空域合成通道数据;然后对获取的水平空域合成通道数据采用STAP方法进行杂波抑制处理,从而实现对端射阵机载预警雷达杂波的有效滤除;最后对STAP处理后的数据进行恒虚警(CFAR)检测,实现对动目标的检测。本发明方案适用于端射阵机载预警雷达杂波抑制处理,具有训练样本需求少和运算复杂度低的特点。
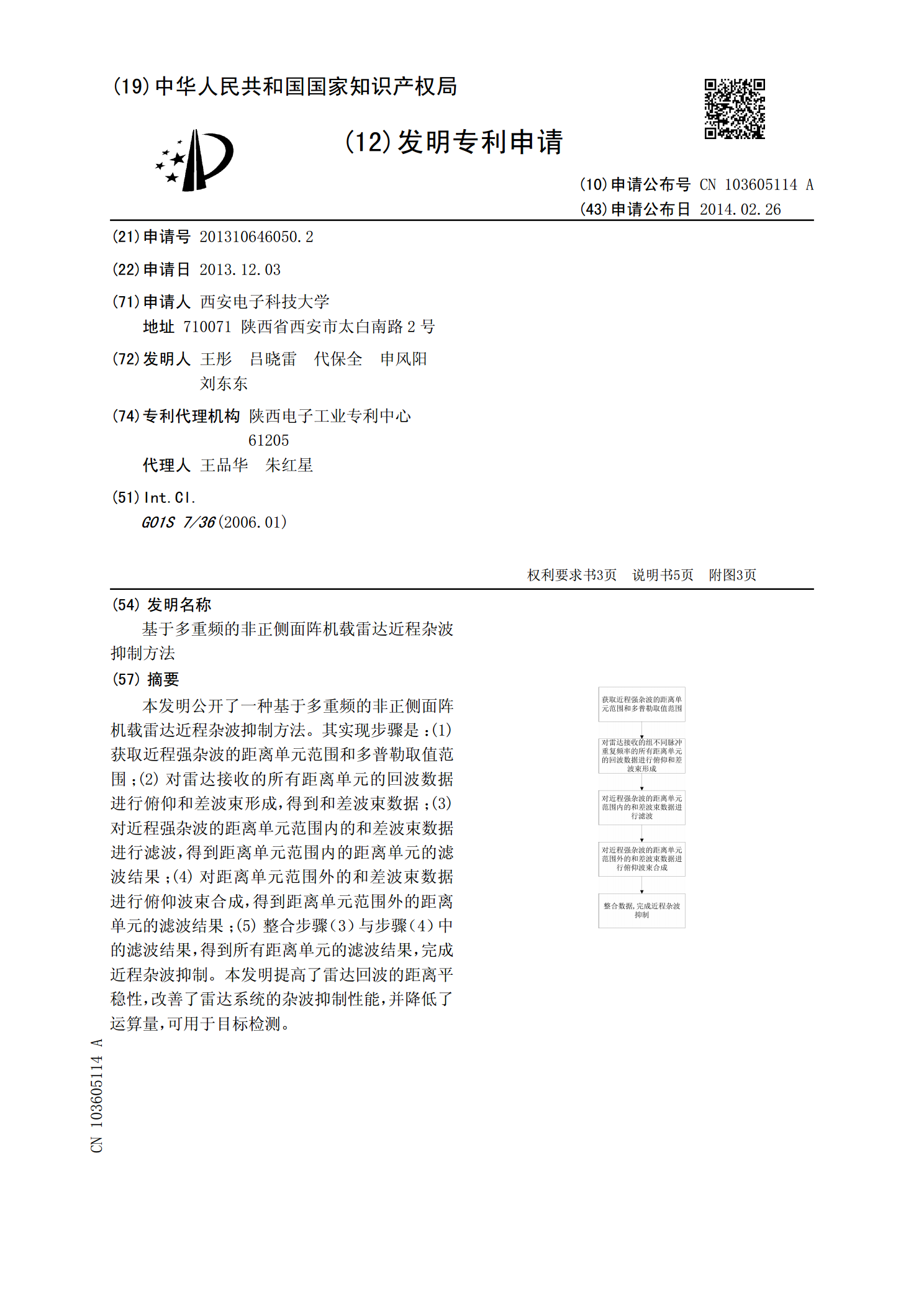
基于多重频的非正侧面阵机载雷达近程杂波抑制方法.pdf
本发明公开了一种基于多重频的非正侧面阵机载雷达近程杂波抑制方法。其实现步骤是:(1)获取近程强杂波的距离单元范围和多普勒取值范围;(2)对雷达接收的所有距离单元的回波数据进行俯仰和差波束形成,得到和差波束数据;(3)对近程强杂波的距离单元范围内的和差波束数据进行滤波,得到距离单元范围内的距离单元的滤波结果;(4)对距离单元范围外的和差波束数据进行俯仰波束合成,得到距离单元范围外的距离单元的滤波结果;(5)整合步骤(3)与步骤(4)中的滤波结果,得到所有距离单元的滤波结果,完成近程杂波抑制。本发明提高了雷达

一种基于稀疏表示的机载雷达近程强杂波抑制方法.pdf
本发明公开了一种基于稀疏表示的机载雷达近程强杂波抑制方法。首先将机载雷达接收的俯仰‑方位‑脉冲三维空时回波数据摆为列矢量;再利用俯仰导向矢量、方位导向矢量和多普勒导向矢量构造超完备字典;然后基于雷达接收数据采用稀疏贝叶斯学习算法估计杂波对应各原子位置及强度信息,进而杂波协方差矩阵;进而采取典型俯仰‑方位‑多普勒三维STAP方法完成对杂波的抑制;最后对处理后数据进行CFAR检测。该方法不仅可实现对强近程非平稳杂波的有效抑制,同时还兼具小样本需求的优势。