
用于检查车辆的至少一个环境检测传感器的方法.pdf

努力****梓颖


1/9

2/9

3/9
4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

用于检查车辆的至少一个环境检测传感器的方法.pdf
本发明涉及一种用于检查车辆(2)的至少一个环境检测传感器(1)的方法。根据本发明,在数字地图中定位车辆(2)的位置,在数字地图中鉴别车辆(2)周围环境的存储的固定物体(3)的特征,这些特征预期由环境检测传感器(1)识别出,并且利用环境检测传感器(1)检测车辆(2)的周围环境,其中当环境检测传感器(1)未识别出预期能识别的特征时,或者当由环境检测传感器(1)实际识别出的特征与预期能识别的特征具有大幅偏差时,作出环境检测传感器(1)出现退化的推断。

用于检查车辆环境检测传感器的方法和车辆的操作方法.pdf
本发明涉及一种用于检查车辆(2)的至少一个环境检测传感器(1)的方法,其中,在数字地图(4)中确定车辆(2)位置,在数字地图(4)中识别所存储的在车辆(2)环境中的静止物(5)的特征(M),所述特征按照预期将由环境检测传感器(1)来识别,用环境检测传感器(1)检测车辆(2)的环境,并且当环境检测传感器(1)未识别出按预期待识别的特征(M)时或当环境检测传感器(1)实际识别的特征(M)明显不同于按预期待识别的特征(M)时,推断出环境检测传感器(1)退化。根据本发明,从车外的中央存储器单元(6)针对规定的预期

用于校准和/或调节车辆的至少一个传感器单元的方法.pdf
根据本发明,在识别到需要对所述至少一个传感器单元(2)进行校准和/或调节时沿着即将到来的车行道(F)确定至少一个适合于实施校准和/或调节的路段(A),在该路段上对于车辆(1)的所述至少半自动化运行而言不需要或者至少很少需要或者最少需要所述至少一个需校准的和/或需调节的传感器单元(2),其中一旦车辆(1)到达所确定的路段(A),就实施对所述至少一个传感器单元(2)的校准和/或调节。
用于检测测量气体的至少一个特性的传感器和用于运行传感器的方法.pdf
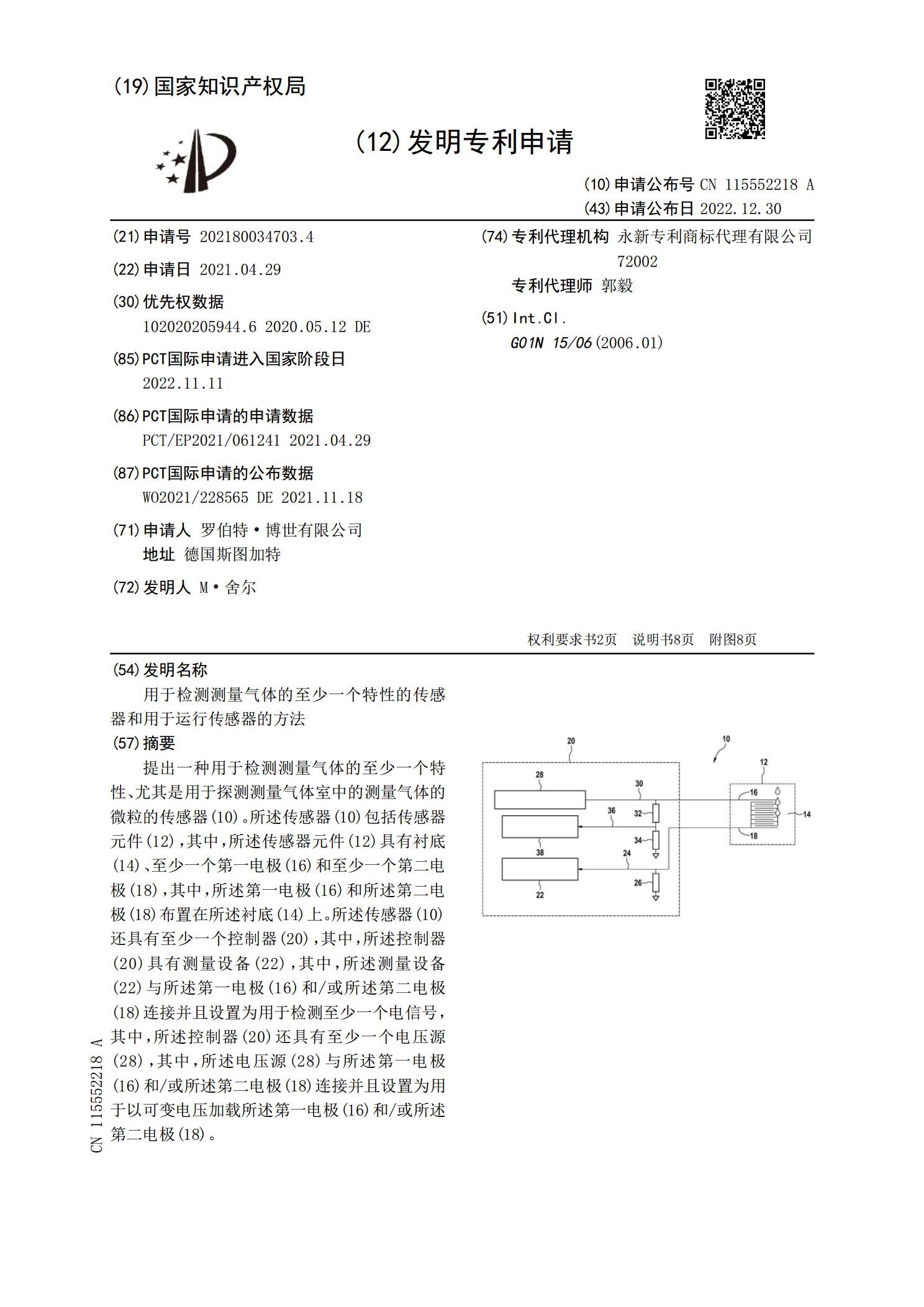
提出一种用于检测测量气体的至少一个特性、尤其是用于探测测量气体室中的测量气体的微粒的传感器(10)。所述传感器(10)包括传感器元件(12),其中,所述传感器元件(12)具有衬底(14)、至少一个第一电极(16)和至少一个第二电极(18),其中,所述第一电极(16)和所述第二电极(18)布置在所述衬底(14)上。所述传感器(10)还具有至少一个控制器(20),其中,所述控制器(20)具有测量设备(22),其中,所述测量设备(22)与所述第一电极(16)和/或所述第二电极(18)连接并且设置为用于检测至少一
用于操作具有至少一个轮速传感器总成的机动车辆的方法.pdf
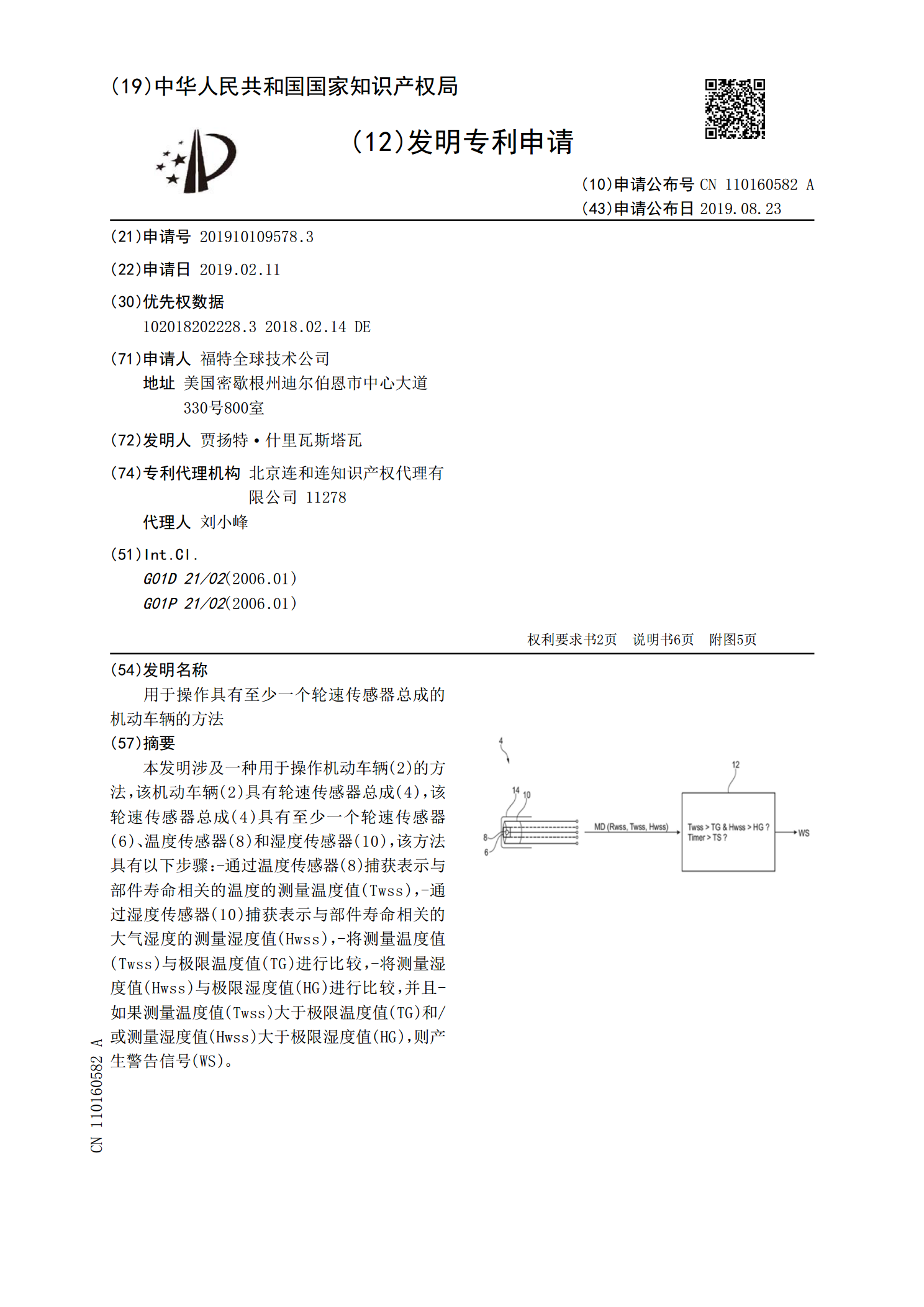
本发明涉及一种用于操作机动车辆(2)的方法,该机动车辆(2)具有轮速传感器总成(4),该轮速传感器总成(4)具有至少一个轮速传感器(6)、温度传感器(8)和湿度传感器(10),该方法具有以下步骤:‑通过温度传感器(8)捕获表示与部件寿命相关的温度的测量温度值(Twss),‑通过湿度传感器(10)捕获表示与部件寿命相关的大气湿度的测量湿度值(Hwss),‑将测量温度值(Twss)与极限温度值(TG)进行比较,‑将测量湿度值(Hwss)与极限湿度值(HG)进行比较,并且‑如果测量温度值(Twss)大于极限温度