
一种基于激光多普勒测振仪的图像振动测量系统.pdf

书生****aa


1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于激光多普勒测振仪的图像振动测量系统.pdf
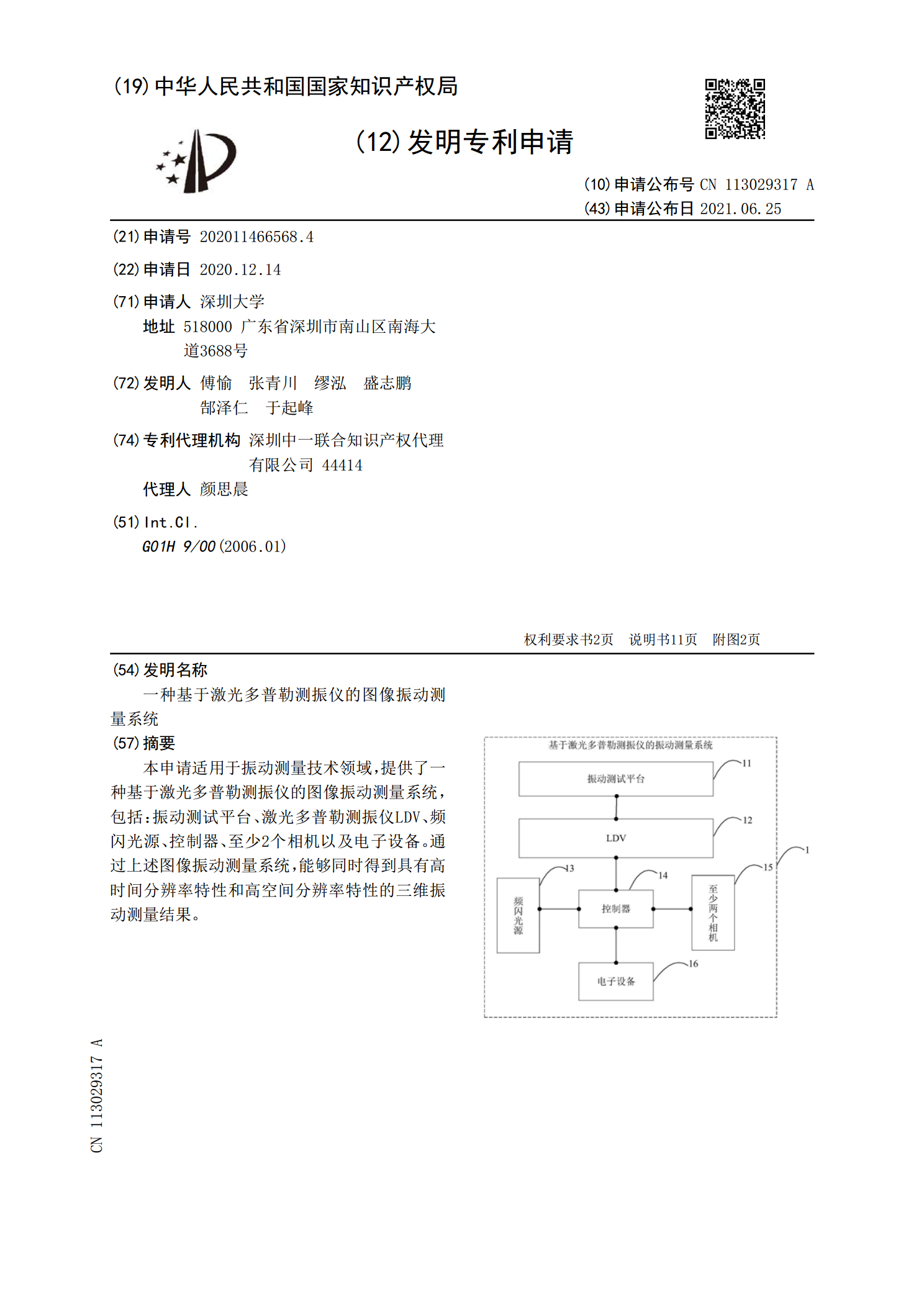
本申请适用于振动测量技术领域,提供了一种基于激光多普勒测振仪的图像振动测量系统,包括:振动测试平台、激光多普勒测振仪LDV、频闪光源、控制器、至少2个相机以及电子设备。通过上述图像振动测量系统,能够同时得到具有高时间分辨率特性和高空间分辨率特性的三维振动测量结果。

一种激光多普勒振动测量系统.pdf
本发明一种激光多普勒振动测量系统,包括电磁激振装置、激光发射器、分光棱镜、信号光探测器A、信号光探测器B、参考光探测器和信号处理仪。电磁激振装置对被测叶片进行激振,激光发射器发射激光,经过分光棱镜将激光分为信号光和参考光,信号光经过叶片表面反射回来后与参考光干涉,由信号光探测器A和信号光探测器B接收;参考光经过分光棱镜后由参考光探测器接收。信号光探测器A、信号光探测器B和参考光探测器将接收信号传递至信号处理仪,信号处理仪通过信号频移即可计算出振动实时速度,并由此得到其他振动数据。本发明相比传统激光多普勒测

一种快速扫描式激光多普勒振动测量系统.pdf
本发明涉及一种快速扫描式激光多普勒振动测量系统,包括激光多普勒振动测量单元和探测光跟踪扫描控制单元,所述激光多普勒振动测量单元包括光纤激光器、相干检测光学链路、第一望远镜、平衡探测器、数据采集卡和正交微分鉴频模块;所述探测光跟踪扫描控制单元包括照明激光器、透镜组、振镜、第二望远镜、位置传感器和位移控制器。本发明能够适用于大面型复合材料及其制品的快速检测,提高无损检测的效率,增强系统的适用性。

基于激光多普勒效应的轴系振动综合测量.docx
基于激光多普勒效应的轴系振动综合测量摘要:随着机械制造业的不断发展,对于机械轴系的振动测试和分析的要求也不断提高。激光多普勒效应是近年来物理学家和工程师研发的一种新型振动测量技术。本文通过对激光多普勒效应原理及其在轴系振动综合测量中的应用进行详细讲解,探讨了该技术的优势、限制和未来发展方向,并结合实际案例进行了实验验证和数据分析。关键词:激光多普勒效应;轴系振动;综合测量一、激光多普勒效应原理激光多普勒效应是利用激光测量运动物体速度的一种物理现象。其原理是当激光束照射到运动物体表面时,激光光频发生变化,即

激光多普勒测振仪误差分析.pptx
激光多普勒测振仪误差分析目录添加章节标题激光多普勒测振仪误差来源激光多普勒测振仪原理误差来源分类测量环境对误差的影响测量对象对误差的影响激光多普勒测振仪误差传递误差传递原理误差传递模型建立误差传递分析误差传递对测量精度的影响激光多普勒测振仪误差修正误差修正方法硬件误差修正软件误差修正误差修正实验验证激光多普勒测振仪误差评估与测试误差评估方法测试实验设计测试结果分析误差评估与测试结论激光多普勒测振仪误差控制与减小提高测量环境稳定性提高测量对象稳定性优化硬件配置与性能优化软件算法与处理技术THANKYOU