
一种基于惯组的激光多普勒测速仪的在线标定方法和装置.pdf

一吃****春艳


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于惯组的激光多普勒测速仪的在线标定方法和装置.pdf
本申请涉及一种基于惯组的激光多普勒测速仪的在线标定方法和装置。所述方法包括:在初始时段使用惯导数据、基于参数解析法对激光多普勒测速仪的安装角和发射倾角进行粗标定,建立组合导航系统的状态方程,以激光多普勒测速仪的速度误差和惯性导航设备的速度误差的差值为观测量建立观测方程,得到激光多普勒测速仪的安装角误差估计值和发射角误差估计值,并对应补偿粗标定值,得到高精度的激光多普勒测速仪的在线标定结果。本方法充分利用了惯性导航设备的特点,不依赖卫星导航系统实时对激光测速仪进行在线高精度标定,降低了设备成本,具有自主性高

基于双激光多普勒测速仪和惯导系统组合导航方法及装置.pdf
本发明提出了一种基于双激光多普勒测速仪和惯导系统组合导航方法及装置,先构建两激光多普勒测速仪在载体坐标系下的输出速度以及速度误差模型;将两激光多普勒测速仪的刻度系数误差和安装角误差以及惯导系统的惯导姿态误差、速度误差、位置误差、陀螺测量误差、加速度计测量误差作为状态向量,构建滤波系统的状态方程;将惯导系统在载体坐标系中的位移增量与两激光多普勒测速仪在载体坐标系下的位移增量之差以及由惯导系统得到的航向角与由两个激光多普勒测速仪得到的航向角之差作为观测量,构建滤波系统的观测方程;由滤波得到的状态向量对双激光多

一种多普勒测速仪多参数在线标定方法.pdf
本发明涉及一种多普勒测速仪多参数在线标定方法,其特征在于:所述标定方法的步骤为:1)系统准备;2)算法计算。本发明设计可降低传统多普勒测速标定方案对航行轨迹和参考信息精度、标定时间等苛刻要求,同时可以多标定出两个安装角误差,并可以实现在线标定;提高了多普勒标定技术的精度和应用范围,同时可以提高水下导航定位精度。

基于激光多普勒测速仪的惯导系统行进间初始对准方法.pdf
本申请涉及一种基于激光多普勒测速仪的惯导系统行进间初始对准方法。所述方法包括:在地心惯性坐标系和当地导航坐标系下,基于激光多普勒测速仪的速度测量值、比力方程和姿态方向余弦矩阵估计,建立捷联惯导系统对准过程的过程模型和测量模型。以惯导设备的姿态误差、陀螺零偏漂移、加速度计零偏漂移,以及激光多普勒测速仪的安装角误差和刻度系数误差为分量构建状态向量,建立鲁棒平方根无迹四元数估计器,得到状态向量的预测值对捷联惯导系统进行行进间初始对准。上述方法的过程模型和测量模型利用激光多普勒测速仪的高精度速度输出,在初始对准中
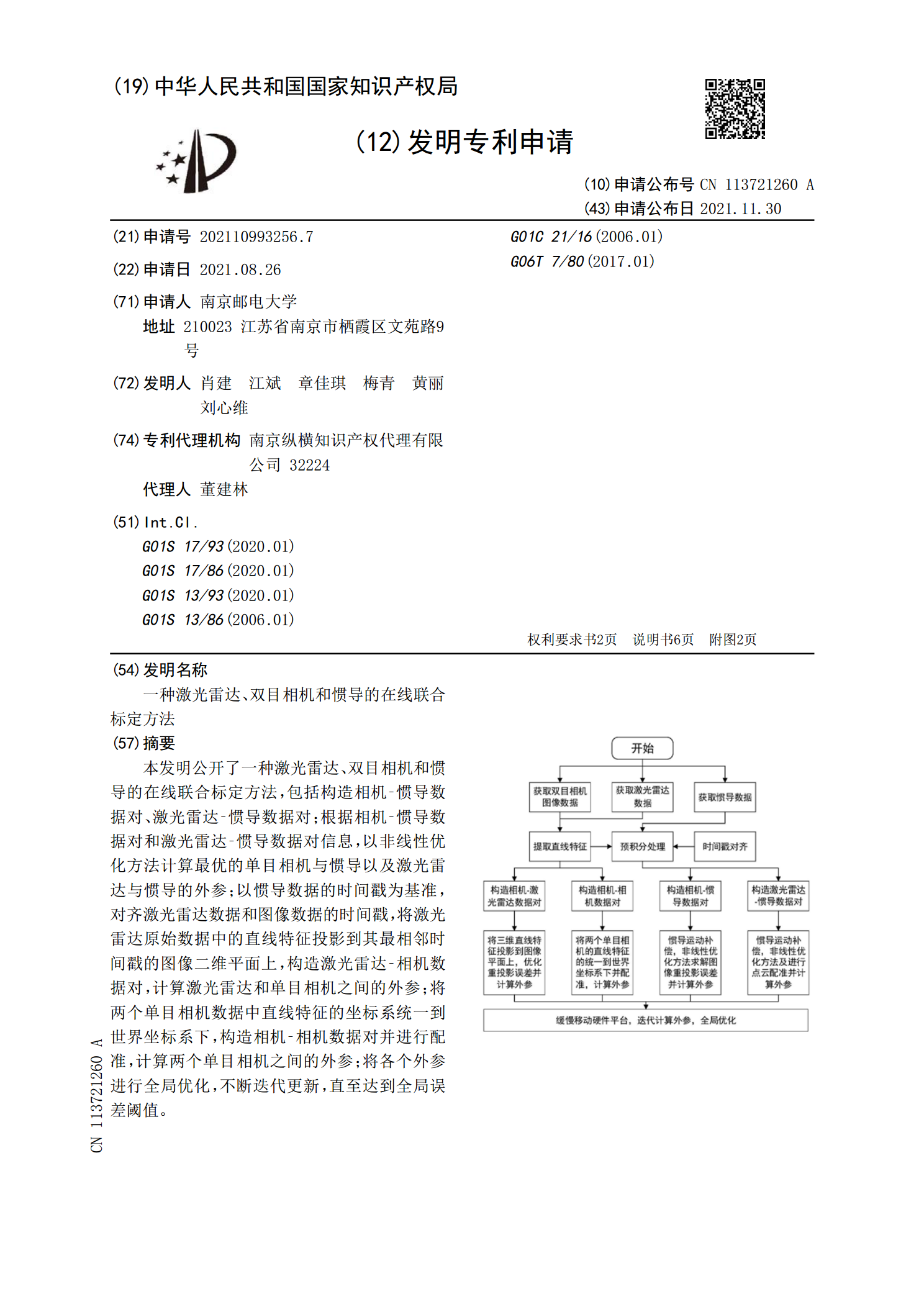
一种激光雷达、双目相机和惯导的在线联合标定方法.pdf
本发明公开了一种激光雷达、双目相机和惯导的在线联合标定方法,包括构造相机‑惯导数据对、激光雷达‑惯导数据对;根据相机‑惯导数据对和激光雷达‑惯导数据对信息,以非线性优化方法计算最优的单目相机与惯导以及激光雷达与惯导的外参;以惯导数据的时间戳为基准,对齐激光雷达数据和图像数据的时间戳,将激光雷达原始数据中的直线特征投影到其最相邻时间戳的图像二维平面上,构造激光雷达‑相机数据对,计算激光雷达和单目相机之间的外参;将两个单目相机数据中直线特征的坐标系统一到世界坐标系下,构造相机‑相机数据对并进行配准,计算两个单