
一种用于水声FBMC系统的信号检测方法.pdf

飞舟****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于水声FBMC系统的信号检测方法.pdf
本发明公开了一种用于水声FBMC通信系统的信号检测方法。该方法是一种基于滤波器组的多载波(FBMC)水声通信技术。本方法提出的水声FBMC通信信号检测方法,是针对水声时延‑多普勒双扩展信道模型的方法,其步骤包含:利用一组正负调频HFM信号实现信号同步和多普勒估计;利用已知的导频符号,实现载波频偏(CFO)估计;利用补偿过CFO的导频符号实现信道估计;根据估计得到的信道构造联合传输矩阵;分割联合传输矩阵为多个子矩阵,并依次对每个子矩阵进行信道均衡,得到待检测符号。本发明的优势在于:对HFM和preamble
一种用于高精度水声定位系统的信号设计及处理方法.pdf
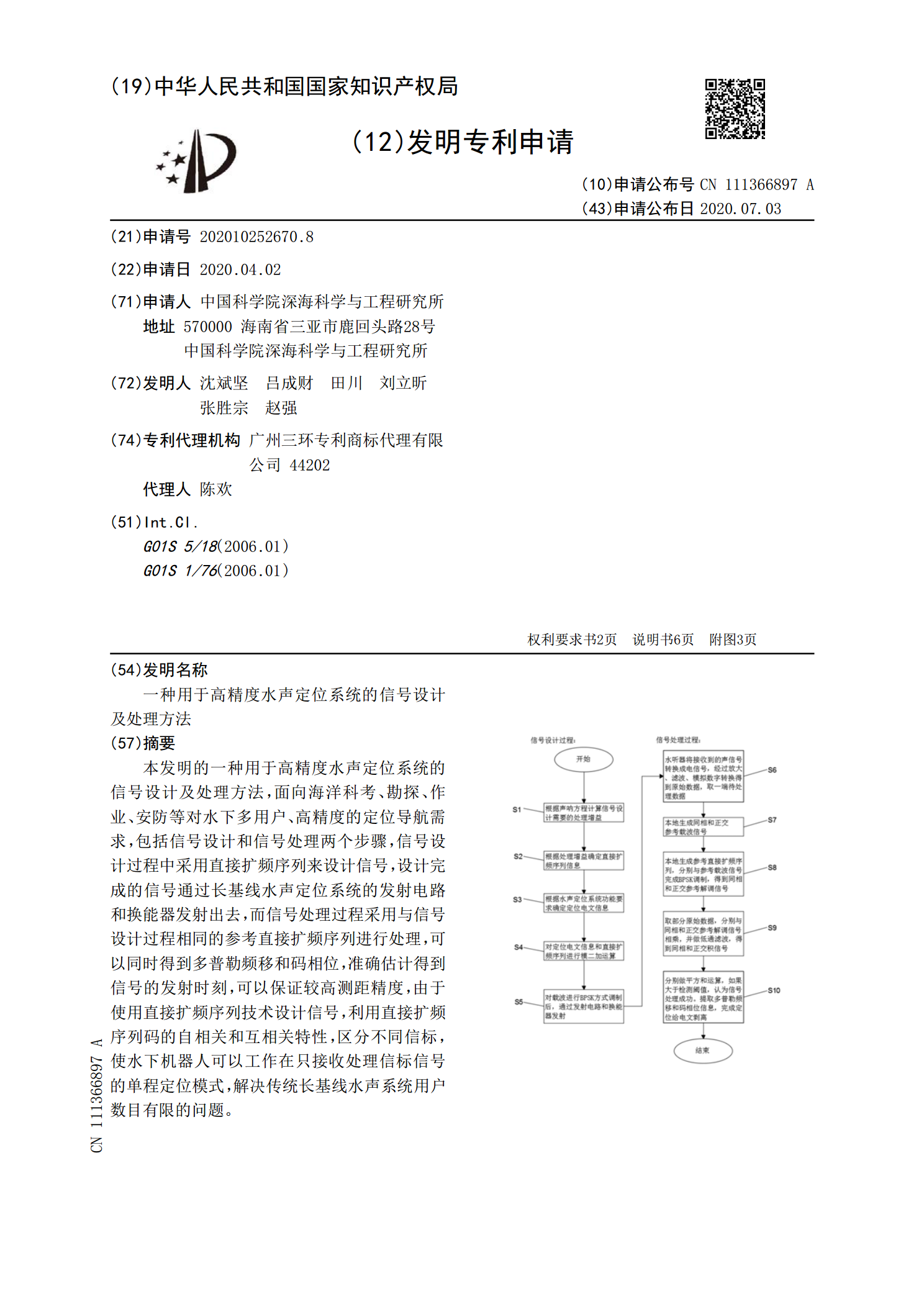
本发明的一种用于高精度水声定位系统的信号设计及处理方法,面向海洋科考、勘探、作业、安防等对水下多用户、高精度的定位导航需求,包括信号设计和信号处理两个步骤,信号设计过程中采用直接扩频序列来设计信号,设计完成的信号通过长基线水声定位系统的发射电路和换能器发射出去,而信号处理过程采用与信号设计过程相同的参考直接扩频序列进行处理,可以同时得到多普勒频移和码相位,准确估计得到信号的发射时刻,可以保证较高测距精度,由于使用直接扩频序列技术设计信号,利用直接扩频序列码的自相关和互相关特性,区分不同信标,使水下机器人可
一种用于水声信号收发电路的电磁隔离方法.pdf
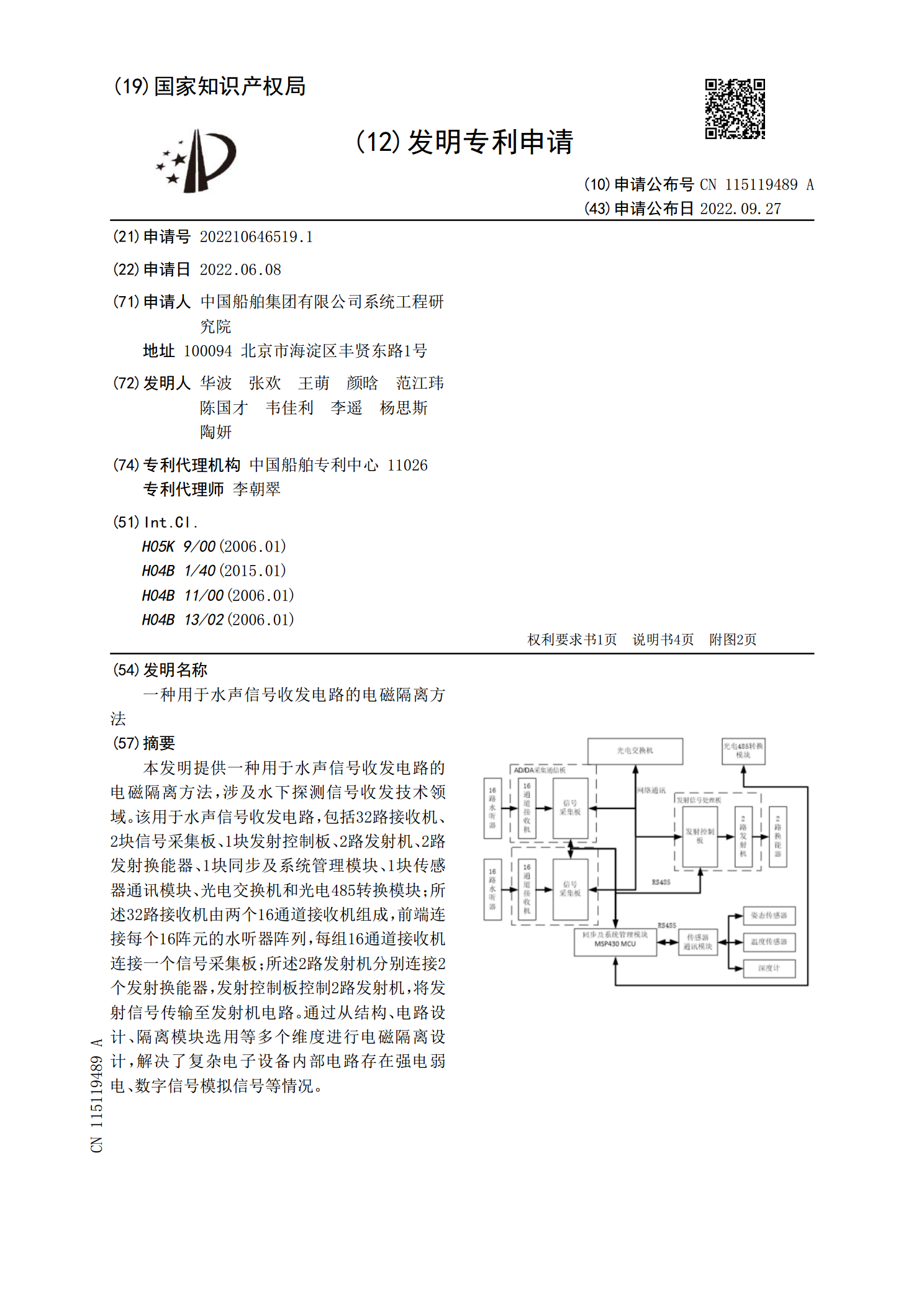
本发明提供一种用于水声信号收发电路的电磁隔离方法,涉及水下探测信号收发技术领域。该用于水声信号收发电路,包括32路接收机、2块信号采集板、1块发射控制板、2路发射机、2路发射换能器、1块同步及系统管理模块、1块传感器通讯模块、光电交换机和光电485转换模块;所述32路接收机由两个16通道接收机组成,前端连接每个16阵元的水听器阵列,每组16通道接收机连接一个信号采集板;所述2路发射机分别连接2个发射换能器,发射控制板控制2路发射机,将发射信号传输至发射机电路。通过从结构、电路设计、隔离模块选用等多个维度进

发明授权-202010252670.8-一种用于高精度水声定位系统的信号设计及处理方法.pdf
(19)国家知识产权局(12)发明专利(10)授权公告号CN111366897B(45)授权公告日2023.03.21(21)申请号202010252670.8(56)对比文件CN1095970(22)申请日2020.04.0232A,2019.04.09CN103823205A,2014.05.28(65)同一申请的已公布的文献号CN109474304A,2019.03.15申请公布号CN111366897ACN104020473A,2014.09.03(43)申请公布日2020.07.03CN1100

一种基于模型的水声弱信号检测方法(英文).docx
一种基于模型的水声弱信号检测方法(英文)AModel-BasedMethodforWeakAcousticSignalDetectioninUnderwaterCommunicationIntroduction:Underwatercommunicationisavitaltechnologyformarineapplicationssuchasscientificresearch,marineresourceexploration,andnavaldefense.However,underwaterco