
一种用于半双工系统的双向实时高精度测距方法.pdf

是你****芹呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于半双工系统的双向实时高精度测距方法.pdf
本提供了一种用于半双工系统的双向实时高精度测距方法,解决了在分时收发工况下收发单向时延无法匹配完成测距的问题。本发明引入了多普勒漂移率,联合伪距测量值、伪速测量值等已知信息,提取A/B星的时钟特性和动态特性,在DOWR不完全解算的基础上,对原始测量值进行时钟修正和动态修正,实时获取高精度的距离测量结果。本发明突破了双向距离解算对伪距测量同时性的约束,实现了分时工况下的实时高精度双向距离解算,拓展了双向距离解算方法的应用场景。

一种基于行人跟踪的实时高精度双目测距系统及方法.pdf
本发明属于测距装置技术领域,公开了一种基于行人跟踪的实时高精度双目测距系统及方法,预测单元,保存行人上一帧的目标区域,作为下一帧SGBM算法的预计算区域;SGBM计算单元,用SGBM算法计算上一帧预测的区域的视差矩阵;BM计算单元,用BM算法计算全图的视差矩阵;逻辑判断单元,对于采用SGBM还是BM的结果进行判断。并且对兴趣点列表中的所有距离值做平均。本发明通过对跟踪区域的预测,加上对BM和SGBM进行结构性的融合,只对行人部分进行深度值的计算,使得可以满足嵌入式的实时性要求,同时保留高精度的特性。对于少

一种长距离高精度测距系统及测距方法.pdf
一种长距离高精度测距系统及测距方法,长距离高精度测距系统包含飞秒激光测距光路和多路同步相位测量与距离解算电路。飞秒激光测距光路包含调制光源和迈克尔逊型干涉仪,光源是经过光纤电光调制器调制的飞秒激光脉冲,迈克尔逊型干涉仪作为测距光路,分别获得参考光路的参考信号和测量光路的测量信号;多路同步相位测量与距离解算电路获取测量信号和参考信号之间的相位差,并进行多路相位测距数据融合与距离解算。本发明克服传统激光测距无法同时兼顾测量距离和测量精度的缺点,以及现有飞秒激光测距光路结构复杂、需异步操作、存在测量死区的缺点。

一种高精度微波测距系统、装置与方法.pdf
本申请属于微波测距的技术领域,公开了一种高精度微波测距系统、装置与方法,方法包括:根据测距范围选用第一测量频差,以所述第一测量频差进行双频测距,得到第一测量结果,由所述第一测量频差和信噪比得到第一标准差;根据所述第一标准差的大小,得到第二测量频差;以所述第二测量频差进行双频测距得到第二测量结果,由所述第二测量频差与信噪比得到第二标准差,完成第一次迭代;进行迭代计算直至第N标准差达到预设要求,得到多组测量频差,N=迭代次数?1,且N大于等于2;以获得的所述多组测量频差形成多个发射频率,进行多级双频法测距,可
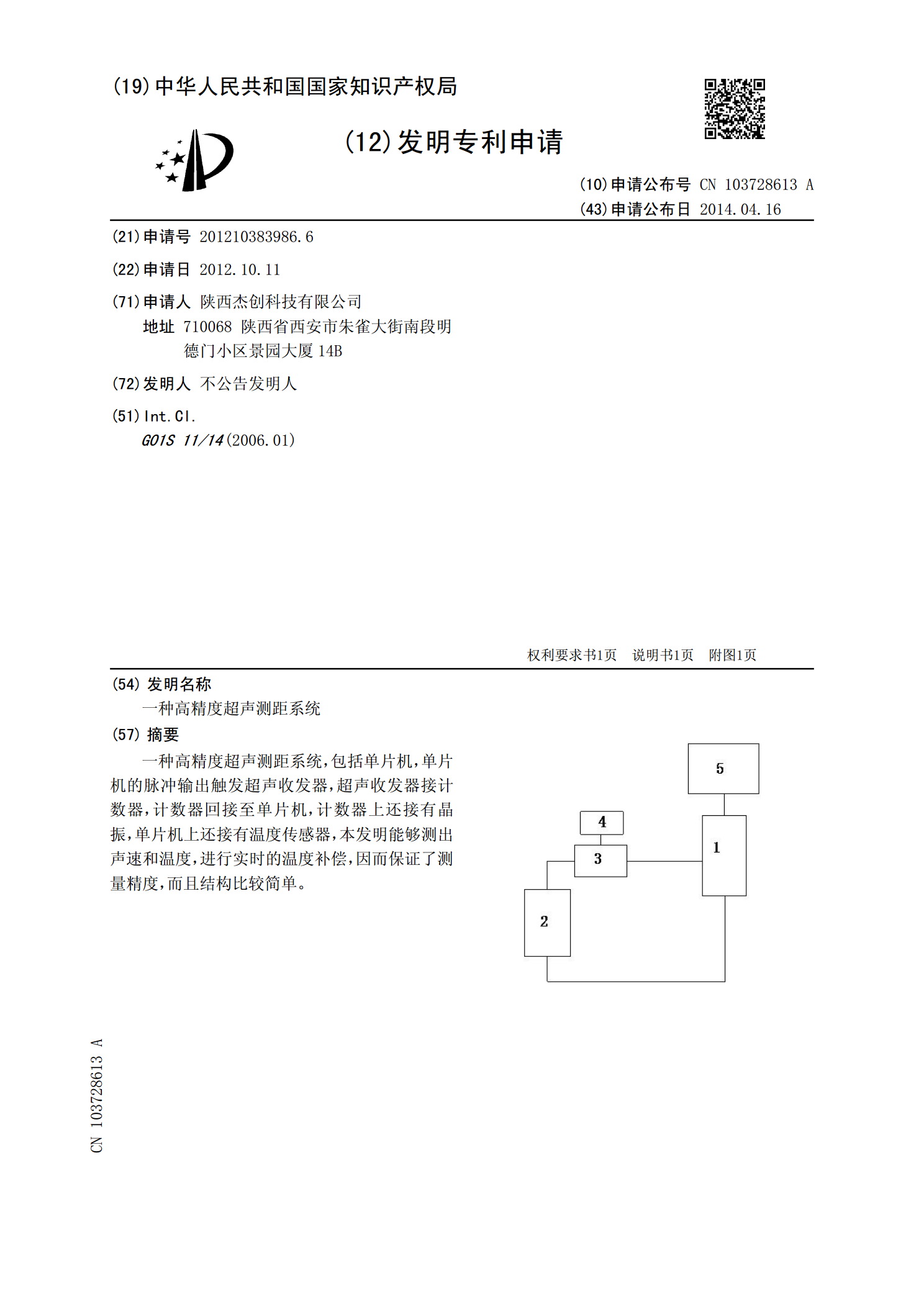
一种高精度超声测距系统.pdf
一种高精度超声测距系统,包括单片机,单片机的脉冲输出触发超声收发器,超声收发器接计数器,计数器回接至单片机,计数器上还接有晶振,单片机上还接有温度传感器,本发明能够测出声速和温度,进行实时的温度补偿,因而保证了测量精度,而且结构比较简单。