
基于波束先验的三维组合波束降维空时自适应处理方法.pdf

一条****发啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于波束先验的三维组合波束降维空时自适应处理方法.pdf
本公开提供一种基于波束先验的三维组合波束降维空时自适应处理方法,包括:根据地面杂波环境变化剧烈程度选择合适的窗口;根据所选择的窗口和当前雷达参数构建二维空域降维变换矩阵;对于每一个回波信号距离单元选取其相邻距离单元作为保护单元,在保护单元外选择多个距离单元形成回波信号样本集合;对距离单元进行逐多普勒单元杂波抑制,抑制过程中根据对应的多普勒单元构建完整的三维降维变换矩阵;使用三维降维变换矩阵对信号样本集合做降维处理得到降维后回波数据;使用降维后的回波数据构造降维杂波加噪声协方差矩阵;计算最优三维降维空时自适

阵列自适应波束形成及空时自适应处理方法研究.docx
阵列自适应波束形成及空时自适应处理方法研究阵列自适应波束形成及空时自适应处理方法研究摘要:阵列自适应波束形成是一种通过调整阵列天线的加权系数来实现对特定方向信号增益最大化的技术。空时自适应处理方法是在多天线阵列中利用时空滤波器实现波束形成和干扰抑制的方法。本文对阵列自适应波束形成和空时自适应处理方法进行了研究,并探讨了其在无线通信等领域的应用。一、引言随着无线通信技术的快速发展,传统的单天线通信系统已经无法满足高速通信和大容量数据传输的需求。因此,多天线阵列系统逐渐成为了研究的热点领域。阵列自适应波束形成

阵列自适应波束形成及空时自适应处理方法研究.docx
阵列自适应波束形成及空时自适应处理方法研究一、概述阵列自适应波束形成及空时自适应处理方法研究是无线通信领域的一个重要研究方向。随着无线通信技术的不断发展与应用,对信号处理技术的要求也越来越高。阵列自适应波束形成技术,作为一种改进和完善传统波束形成方法的重要技术,正逐渐成为无线通信领域的研究热点。阵列自适应波束形成技术的基本原理是利用阵列天线的多个元件接收到的信号之间的相位和幅度差异,通过加权和相加的方式形成具有指向性的波束。这使得接收波束的指向性最大,从而抑制其他方向的干扰和噪声。在空间波束形成的过程中,

基于空时自适应处理雷达的和差波束形成方法.pdf
本发明公开一种基于空时自适应处理雷达的和差波束形成方法,主要解决现有技术主瓣响应失真的问题。其实现步骤是:1.在信号处理机中输入空时自适应处理雷达的采样数据;2.根据采样数据估计得到采样协方差矩阵;3.设计五个约束点的角度和多普勒;4.根据采样协方差矩阵和五个约束点,设计和波束权矢量;5.根据采样协方差矩阵和五个约束点,设计空域差波束权矢量;6.根据采样协方差矩阵和五个约束点,设计时域差波束权矢量;7.根据采样数据和波束权矢量,得到和波束、空域差波束和时域差波束的输出信号。本发明通过幅度相位联合约束、导数
一种基于特征波束的自适应波束域FSA的杂波抑制降维方法.pdf
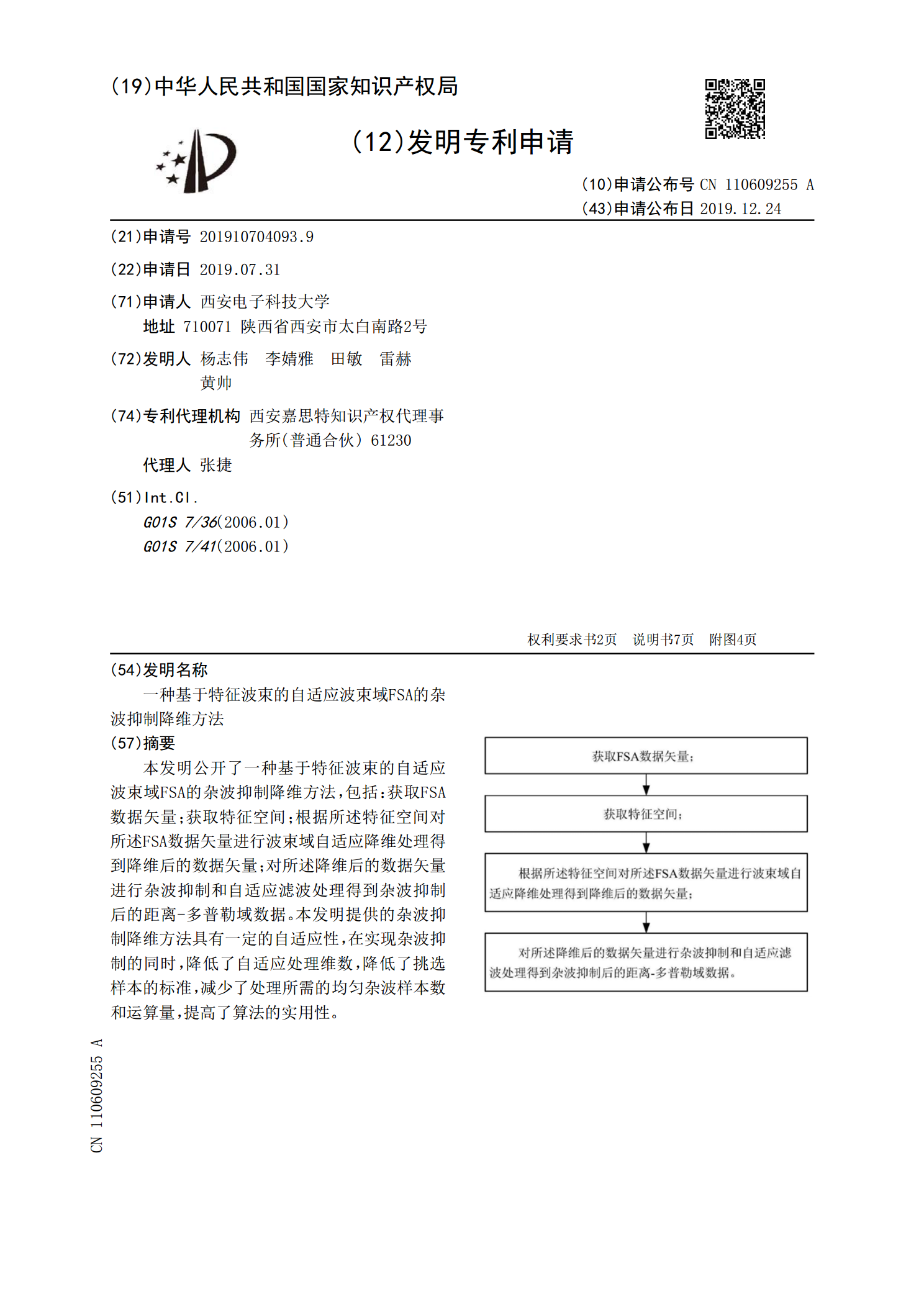
本发明公开了一种基于特征波束的自适应波束域FSA的杂波抑制降维方法,包括:获取FSA数据矢量;获取特征空间;根据所述特征空间对所述FSA数据矢量进行波束域自适应降维处理得到降维后的数据矢量;对所述降维后的数据矢量进行杂波抑制和自适应滤波处理得到杂波抑制后的距离‑多普勒域数据。本发明提供的杂波抑制降维方法具有一定的自适应性,在实现杂波抑制的同时,降低了自适应处理维数,降低了挑选样本的标准,减少了处理所需的均匀杂波样本数和运算量,提高了算法的实用性。