
一种低轨卫星的混合测量动态定位方法.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种低轨卫星的混合测量动态定位方法.pdf
一种低轨卫星的混合测量动态定位方法,根据已知卫星信息,构建系统状态方程及动态用户的组合观测方程,基于扩展卡尔曼滤波算法,获取动态用户接收机位置、钟差、频差,针对低轨卫星星座覆盖特性区别于中高轨卫星星座,以及低轨卫星相对运动速度高的特点,提出了基于伪距和多普勒混合测量资料以及用户的惯导器件测量信息,单颗低轨卫星进行实时动态导航定位的方法。

一种基于低轨卫星星座的定位方法及定位系统.pdf
本申请公开了一种基于低轨卫星星座的定位方法及定位系统,其定位方法包括:控制地面站生成并定时发射卫星定轨信号;根据卫星定轨信号对低轨卫星星座中每一个低轨卫星进行轨道和时间校准;控制所有的低轨卫星生成并定时发射卫星定位信号;当地面接收机接收到单个低轨卫星的卫星定位信号时,根据多普勒技术对卫星定位信号进行定位解算,得到定位位置信息。低轨卫星星座的定位方式能够明显降低定位系统的造价成本。

一种VDES系统中的低轨卫星的动态接入方法.pdf
本发明属于无线通信技术领域,具体涉及一种VDES系统中的低轨卫星的动态接入方法,包括以下步骤:根据上行信号的多普勒频移对船舶进行排序和编号;根据船舶的编号,依次对船舶进行低轨卫星的上行动态接入。与现有的直接竞争接入方法相比,本发明增加了根据多普勒频移值对船舶进行的排序,依据排序先对多普勒频移值小的船舶进行接入,这样可以降低系统的多普勒频移;本发明还增加了当船舶处于多颗低轨卫星覆盖范围内时,一颗低轨卫星接入失败就调整到另外一颗低轨卫星进行接入的动态调整,这样可以充分利用低轨卫星的空闲信道资源。因此本发明所公
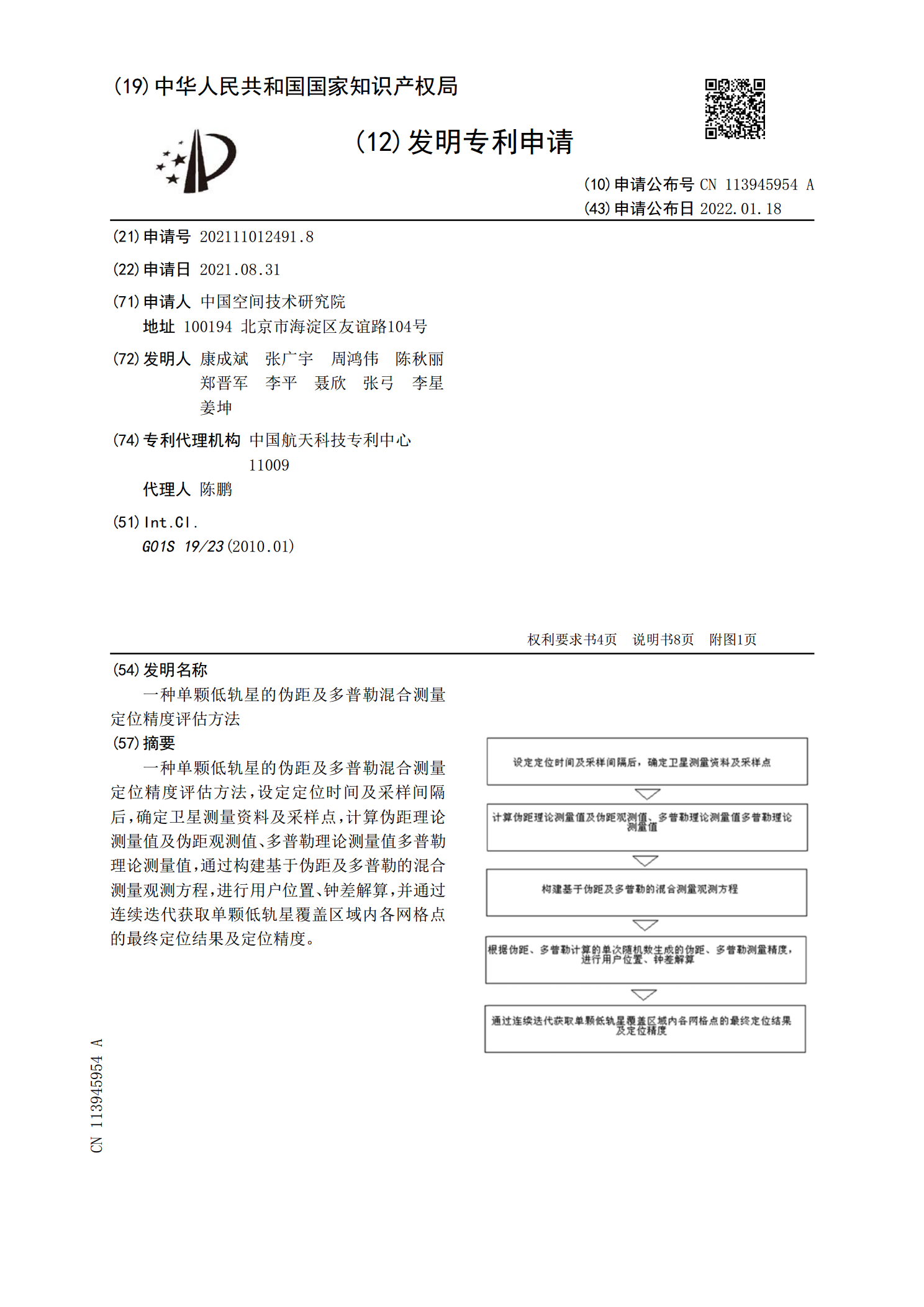
一种单颗低轨星的伪距及多普勒混合测量定位精度评估方法.pdf
一种单颗低轨星的伪距及多普勒混合测量定位精度评估方法,设定定位时间及采样间隔后,确定卫星测量资料及采样点,计算伪距理论测量值及伪距观测值、多普勒理论测量值多普勒理论测量值,通过构建基于伪距及多普勒的混合测量观测方程,进行用户位置、钟差解算,并通过连续迭代获取单颗低轨星覆盖区域内各网格点的最终定位结果及定位精度。

低轨卫星协同测频无源定位方法.pdf
本发明公开了一种低轨卫星协同测频无源定位方法,该方法包括:多个低轨卫星同时接收地面辐射源信号并计算地面辐射源信号对应的多普勒频率;基于各个低轨卫星计算的多普勒频率和轨道数据,计算每个低轨卫星对应的地面辐射源的坐标测量值;计算所有地面辐射源的坐标测量值的平均值,作为地面辐射源的初始坐标值;基于初始坐标值,计算各个低轨卫星与地面辐射源的位置精度强弱度值;基于位置精度强弱度值,计算所有坐标测量值对应的加权系数;根据所有地面辐射源的坐标测量值及其对应的加权系数,计算地面辐射源的最终坐标值。本发明的低轨卫星协同测频