
一种基于矩阵束的信道预测方法.pdf

光誉****君哥


1/10

2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
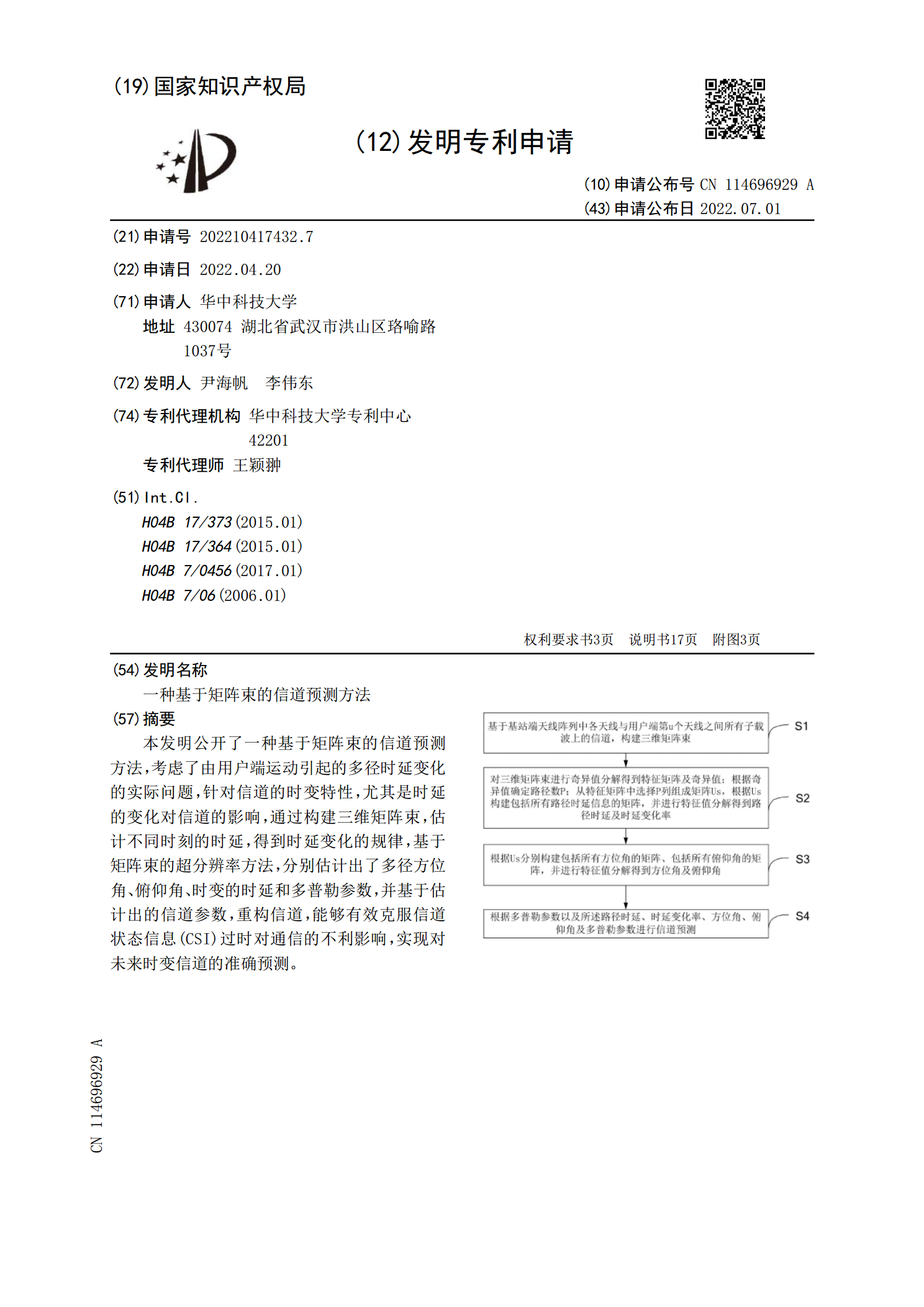
一种基于矩阵束的信道预测方法.pdf
本发明公开了一种基于矩阵束的信道预测方法,考虑了由用户端运动引起的多径时延变化的实际问题,针对信道的时变特性,尤其是时延的变化对信道的影响,通过构建三维矩阵束,估计不同时刻的时延,得到时延变化的规律,基于矩阵束的超分辨率方法,分别估计出了多径方位角、俯仰角、时变的时延和多普勒参数,并基于估计出的信道参数,重构信道,能够有效克服信道状态信息(CSI)过时对通信的不利影响,实现对未来时变信道的准确预测。
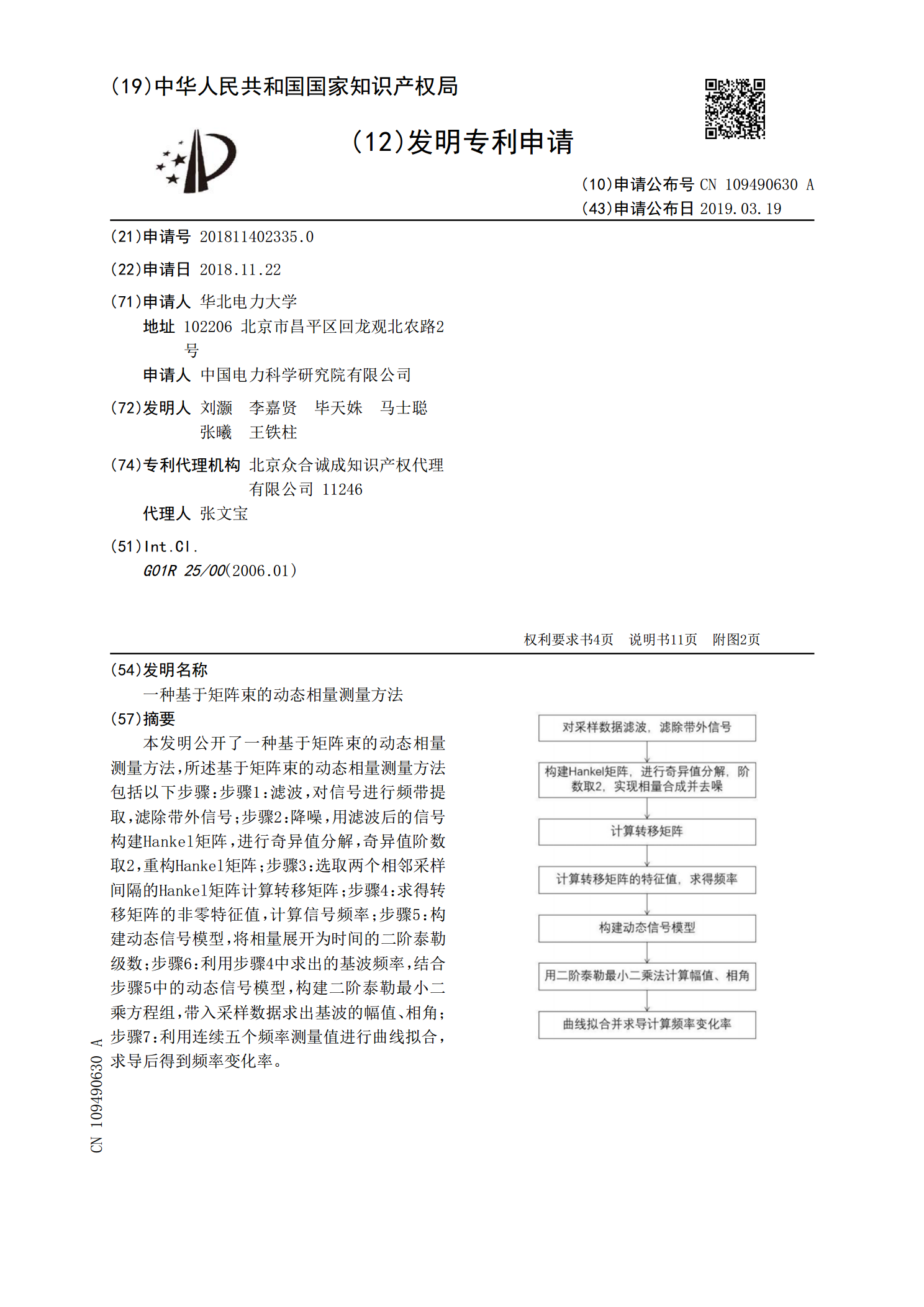
一种基于矩阵束的动态相量测量方法.pdf
本发明公开了一种基于矩阵束的动态相量测量方法,所述基于矩阵束的动态相量测量方法包括以下步骤:步骤1:滤波,对信号进行频带提取,滤除带外信号;步骤2:降噪,用滤波后的信号构建Hankel矩阵,进行奇异值分解,奇异值阶数取2,重构Hankel矩阵;步骤3:选取两个相邻采样间隔的Hankel矩阵计算转移矩阵;步骤4:求得转移矩阵的非零特征值,计算信号频率;步骤5:构建动态信号模型,将相量展开为时间的二阶泰勒级数;步骤6:利用步骤4中求出的基波频率,结合步骤5中的动态信号模型,构建二阶泰勒最小二乘方程组,带入采样

一种基于多维矩阵的双向全双工中继系统信道估计方法.pdf
本发明在全双工双向中继系统中提出了一种基于多维矩阵的信号估计方法,主要解决全双工系统存在同频干扰情况下的信道估计问题。该方法由自干扰消除、多维矩阵建模及信道估计三部分组成,通过使用少量训练序列获得信号及信道的估计信息。该方法无须迭代,具有较低的计算复杂度。仿真结果验证了所提方法的有效性。同时,与已有的双向中继接收方法相比,该方法考虑了全双工干扰的消除,更具有实际意义。

基于信道预测的TMSBL水声OFDM时变信道估计方法.pdf
本发明提出了基于信道预测的TMSBL水声OFDM时变信道估计方法,所述估计方法包括以下步骤:基于CP‑OFDM通信系统模型,将连续块间信道路径的幅度、时延和多普勒因子的变化建模成基于簇的信道偏移参数模型;通过对信道偏移参数的估计,利用前一个符号估计的信道进行补偿来预测当前信道,并根据已知的导频符号虚构出当前信道的虚拟接收向量;构建基于信道预测构建联合估计模型,基于联合估计模型采用TMSBL算法对稀疏信道进行联合估计。本发明在基于簇特征的路径时延、幅度发生明显变化的快时变水声信道下,充分利用相邻块间信道的时
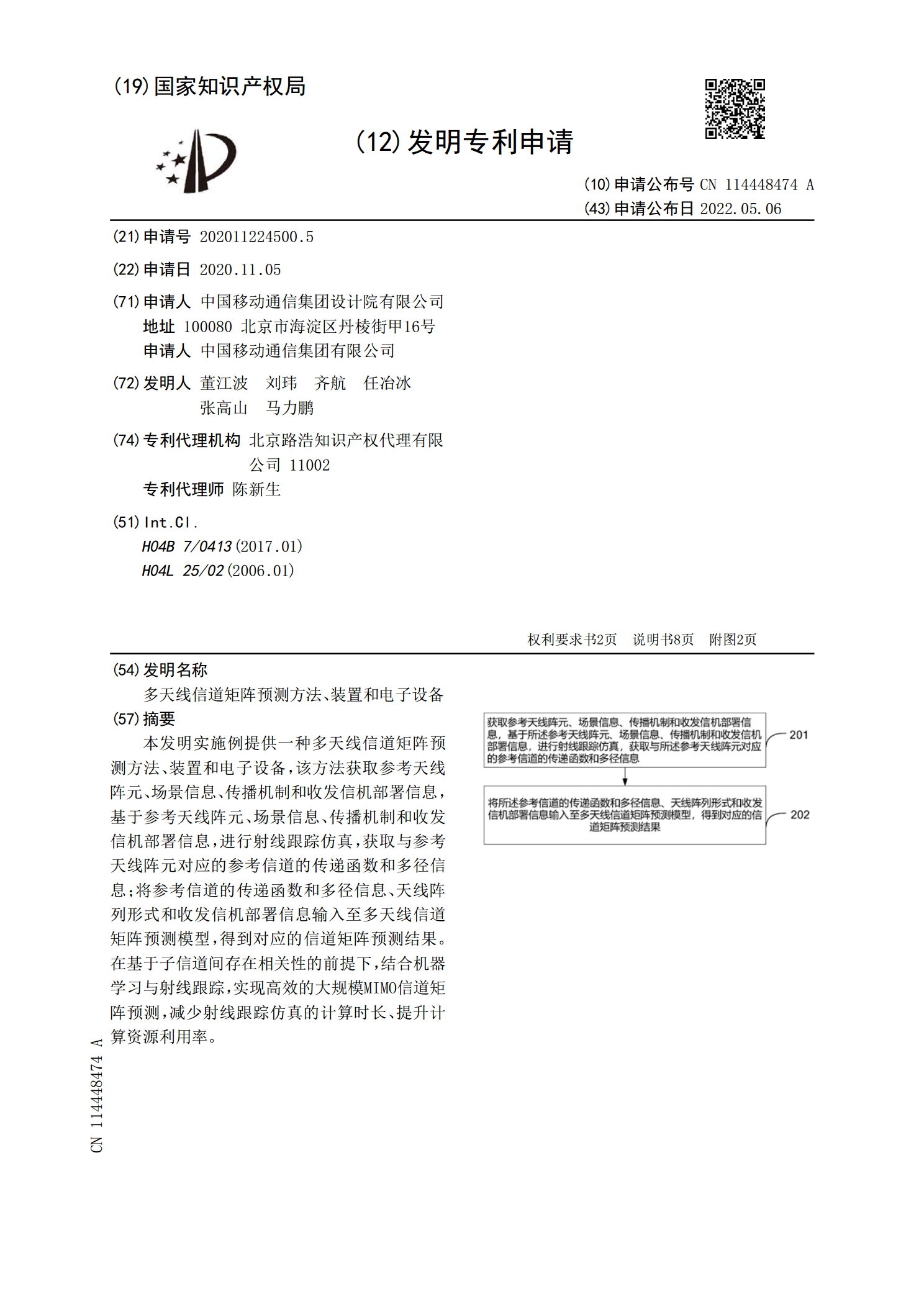
多天线信道矩阵预测方法、装置和电子设备.pdf
本发明实施例提供一种多天线信道矩阵预测方法、装置和电子设备,该方法获取参考天线阵元、场景信息、传播机制和收发信机部署信息,基于参考天线阵元、场景信息、传播机制和收发信机部署信息,进行射线跟踪仿真,获取与参考天线阵元对应的参考信道的传递函数和多径信息;将参考信道的传递函数和多径信息、天线阵列形式和收发信机部署信息输入至多天线信道矩阵预测模型,得到对应的信道矩阵预测结果。在基于子信道间存在相关性的前提下,结合机器学习与射线跟踪,实现高效的大规模MIMO信道矩阵预测,减少射线跟踪仿真的计算时长、提升计算资源利用