
一种基于高阶泰勒展开的三维风场反演方法.pdf

是来****文章


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于高阶泰勒展开的三维风场反演方法.pdf
本发明涉及一种基于高阶泰勒展开的三维风场反演方法,包括:S1.利用测风激光雷达对感兴趣的风场区域进行探测,获取风场区域的径向速度观测值V

基于泰勒级数展开的区间反演方法.docx
基于泰勒级数展开的区间反演方法基于泰勒级数展开的区间反演方法摘要:区间反演是一种重要的数据处理方法,它可以将给定的区间函数转换为其在某个范围内的近似函数。泰勒级数展开是一种常用的数值方法,可以将一个函数在某个点附近展开为一系列的多项式。本文介绍了一种基于泰勒级数展开的区间反演方法,并通过数值实验验证了其有效性和精确性。引言:在实际应用中,我们经常会遇到需要求解一个函数在给定区间内的近似值的问题。例如,我们可能需要估计一辆汽车在某个时间段内行驶的距离,或者求解一种物质的浓度在某个空间范围内的分布。这些问题都
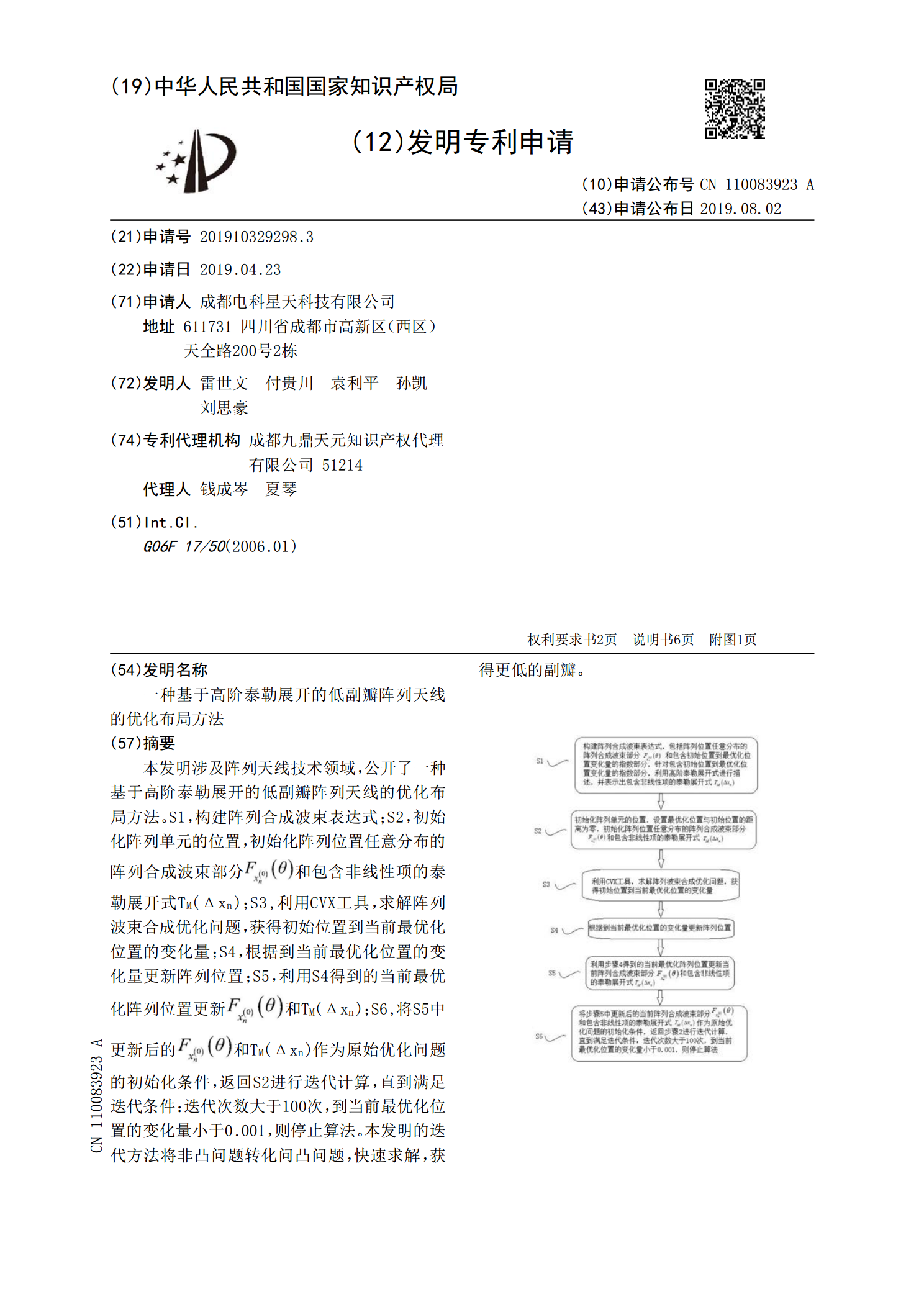
一种基于高阶泰勒展开的低副瓣阵列天线的优化布局方法.pdf
本发明涉及阵列天线技术领域,公开了一种基于高阶泰勒展开的低副瓣阵列天线的优化布局方法。S1,构建阵列合成波束表达式;S2,初始化阵列单元的位置,初始化阵列位置任意分布的阵列合成波束部分

基于双多普勒雷达反演的区域三维风场拼图方法.pdf
本申请涉及一种基于双多普勒雷达反演的区域三维风场拼图方法,其包括以下步骤:根据两多普勒雷达之间的距离对多部多普勒雷达进行分组;对每组双多普勒雷达均进行双多普勒雷达三维风场反演;对多组双多普勒雷达的反演结果进行权重计算,得到反演网格点处的径向速度,根据径向速度和质量连续方程得到反演网格点处的垂直速度;根据所有反演网格点处的径向速度和垂直速度得到区域三维风场的拼图。本申请针对多普勒雷达密集区,充分利用多普勒雷达密集区的多部多普勒雷达的径向速度信息,能够获得比单雷达更为准确的风场反演产品。
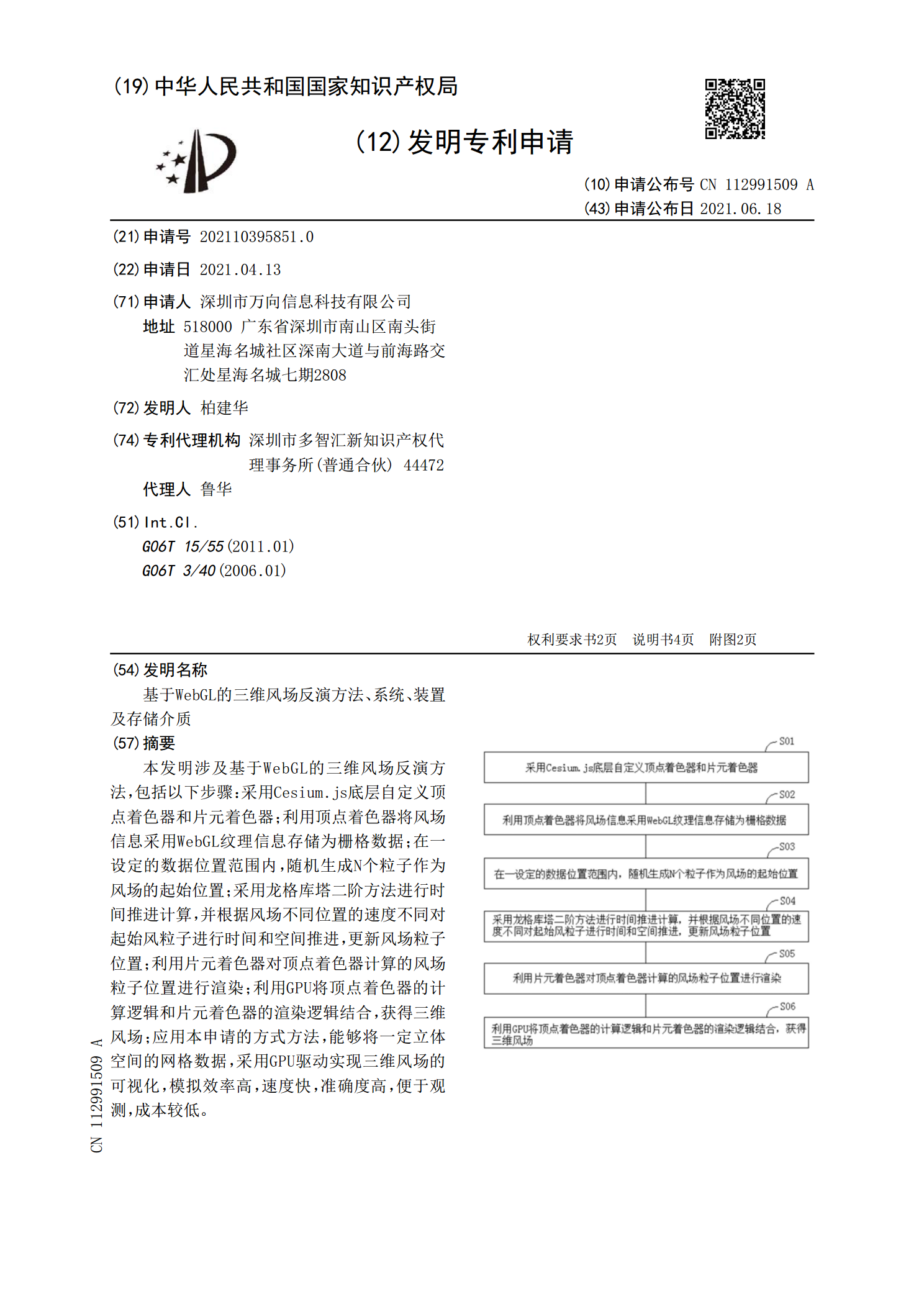
基于WebGL的三维风场反演方法、系统、装置及存储介质.pdf
本发明涉及基于WebGL的三维风场反演方法,包括以下步骤:采用Cesium.js底层自定义顶点着色器和片元着色器;利用顶点着色器将风场信息采用WebGL纹理信息存储为栅格数据;在一设定的数据位置范围内,随机生成N个粒子作为风场的起始位置;采用龙格库塔二阶方法进行时间推进计算,并根据风场不同位置的速度不同对起始风粒子进行时间和空间推进,更新风场粒子位置;利用片元着色器对顶点着色器计算的风场粒子位置进行渲染;利用GPU将顶点着色器的计算逻辑和片元着色器的渲染逻辑结合,获得三维风场;应用本申请的方式方法,能够将