
基于模糊多输出最小二乘支持向量机的DVL建模方法.pdf

一吃****仪凡


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于模糊多输出最小二乘支持向量机的DVL建模方法.pdf
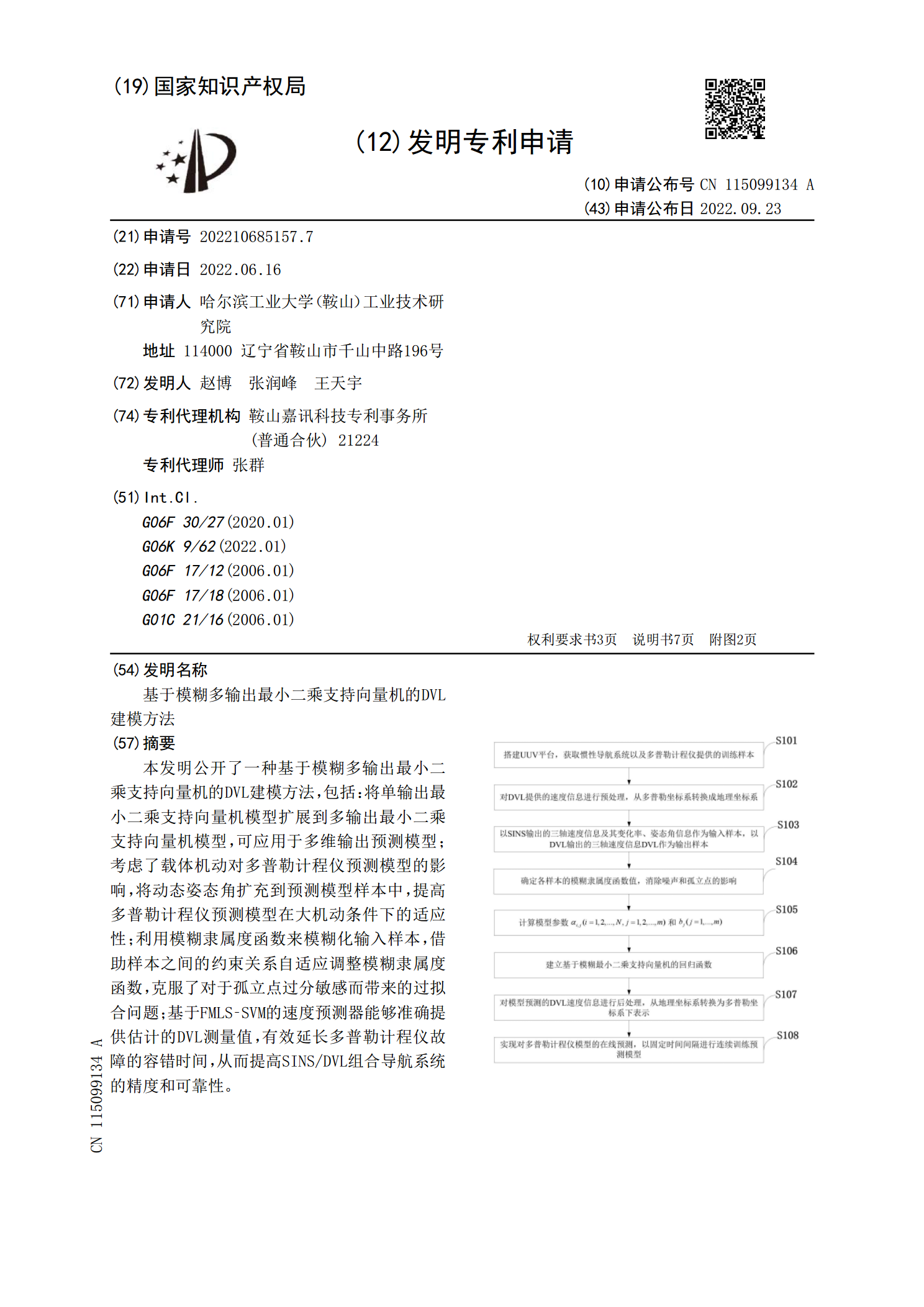
本发明公开了一种基于模糊多输出最小二乘支持向量机的DVL建模方法,包括:将单输出最小二乘支持向量机模型扩展到多输出最小二乘支持向量机模型,可应用于多维输出预测模型;考虑了载体机动对多普勒计程仪预测模型的影响,将动态姿态角扩充到预测模型样本中,提高多普勒计程仪预测模型在大机动条件下的适应性;利用模糊隶属度函数来模糊化输入样本,借助样本之间的约束关系自适应调整模糊隶属度函数,克服了对于孤立点过分敏感而带来的过拟合问题;基于FMLS‑SVM的速度预测器能够准确提供估计的DVL测量值,有效延长多普勒计程仪故障的容

模糊多输出最小二乘支持向量机的分类与回归研究.docx
模糊多输出最小二乘支持向量机的分类与回归研究模糊多输出最小二乘支持向量机的分类与回归研究摘要:随着机器学习和模式识别技术的不断发展,多输出分类和回归问题成为了研究的热点。模糊多输出最小二乘支持向量机(FuzzyMulti-OutputLeastSquaresSupportVectorMachine,FMO-LS-SVM)是一种常用且有效的多输出学习算法。本文针对模糊多输出最小二乘支持向量机在分类和回归问题上的应用进行了研究与探讨。首先,本文对模糊多输出最小二乘支持向量机的基本原理进行了介绍,包括支持向量机

基于最小二乘支持向量机的调节阀建模方法.docx
基于最小二乘支持向量机的调节阀建模方法摘要:本文提出一种基于最小二乘支持向量机的调节阀建模方法。首先介绍了调节阀的工作原理和影响调节阀性能的因素。接着,引入了最小二乘支持向量机的基本原理和步骤。然后,使用实际数据进行模型训练和验证,取得了较好的效果。最后,总结了本文的研究成果,对未来的研究提出了展望。关键词:调节阀;建模;最小二乘支持向量机;模型训练1.引言调节阀是工业自动化系统中常用的控制元件,具有调节流量、压力、温度等作用。在调节阀的设计和优化过程中,建立精确的数学模型具有重要意义。最小二乘支持向量机

基于最小二乘支持向量机的时变信道建模.docx
基于最小二乘支持向量机的时变信道建模时变信道建模是无线通信中的重要领域之一,它指的是无线信号在传输过程中受到的时变信道的影响,从而导致接收信号的抖动、失真和频率偏移等问题。为有效地解决这些问题,研究者们采用了基于最小二乘支持向量机(LeastSquaresSupportVectorMachine,LS-SVM)的方法进行信道建模,其主要优点是可以建立高精度的时变信道模型,并具有较强的通用性和实用性。LS-SVM是一种针对特征空间中的非线性分类和回归分析问题进行优化的机器学习方法。该方法的主要思想是将原始数

基于最小二乘模糊支持向量机的基因分类研究.docx
基于最小二乘模糊支持向量机的基因分类研究随着生物科技的迅速发展,基因分类研究正在成为一项热门的研究课题。基因分类是将不同生物的基因序列进行分析、比较、分类的过程。它的研究目的是确定物种间的遗传关系,揭示物种起源和演化,从而更好地理解物种的多样性以及它们之间的关系。传统的基因分类方法依靠人工在数据中寻找神经网络,存在效率低、结果准确度低等问题。而最小二乘模糊支持向量机(LeastSquaresFuzzySupportVectorMachine,简称LSF-SVM)则为解决这些问题提供了一种新的可能。LSF-