
一种用于消防救援的机器人机械臂.pdf

山柳****魔王

1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于消防救援的机器人机械臂.pdf
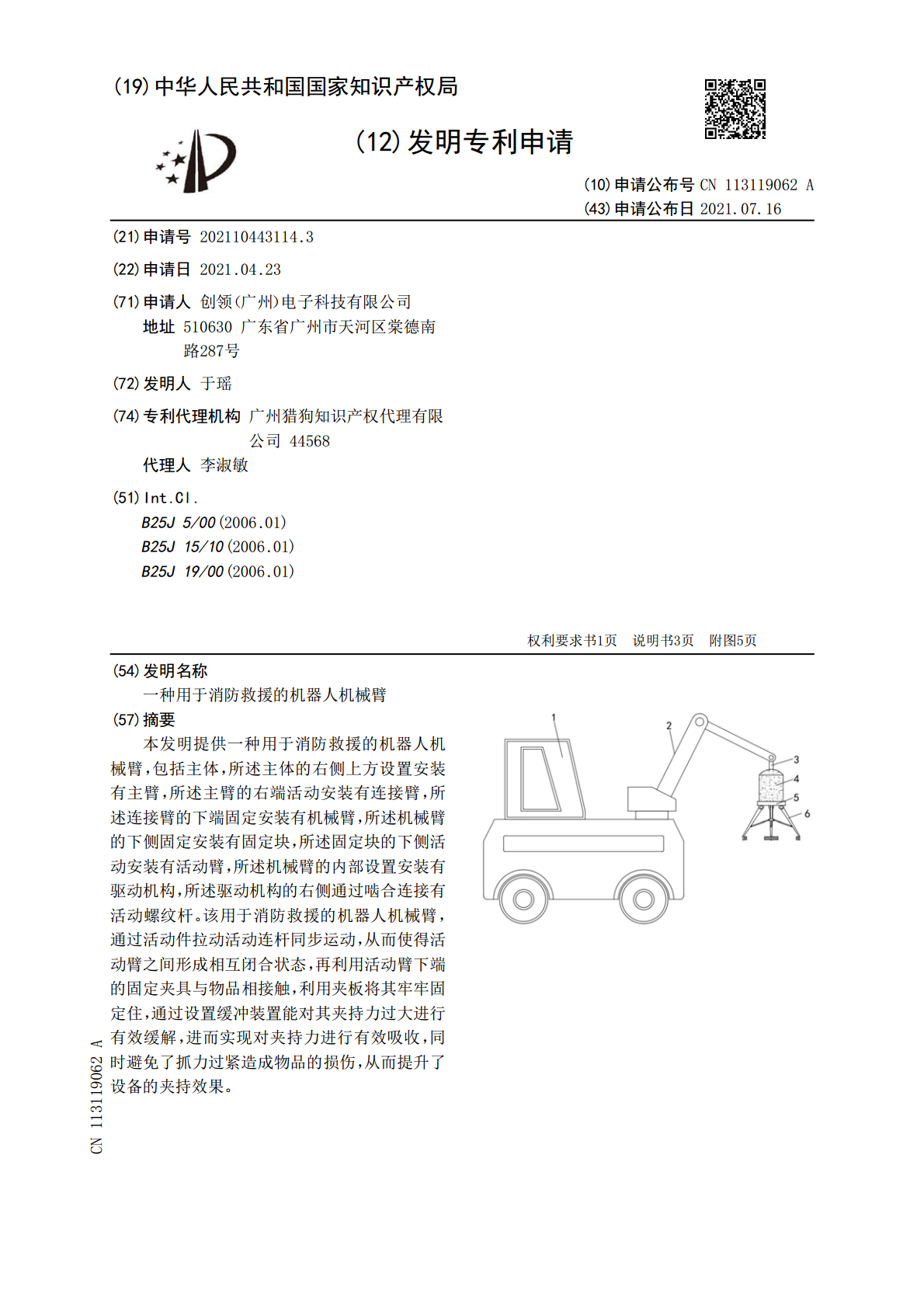
本发明提供一种用于消防救援的机器人机械臂,包括主体,所述主体的右侧上方设置安装有主臂,所述主臂的右端活动安装有连接臂,所述连接臂的下端固定安装有机械臂,所述机械臂的下侧固定安装有固定块,所述固定块的下侧活动安装有活动臂,所述机械臂的内部设置安装有驱动机构,所述驱动机构的右侧通过啮合连接有活动螺纹杆。该用于消防救援的机器人机械臂,通过活动件拉动活动连杆同步运动,从而使得活动臂之间形成相互闭合状态,再利用活动臂下端的固定夹具与物品相接触,利用夹板将其牢牢固定住,通过设置缓冲装置能对其夹持力过大进行有效缓解,进

一种用于灾难救援机器人机械臂.pdf
本发明涉及一种用于灾难救援机器人机械臂,包括电源、平动电机、减速箱联轴器、减速箱、机械钳、机械钻、机械剪、摄像头、小臂、小臂连接体、小臂液压杆、大臂、大臂连接体、大臂液压杆、主控板、回转驱动锥齿轮、回转锥齿轮、回转锥齿轮轴、电磁离合器、角度传感器、回转小齿轮、回转大齿轮、液压泵、电磁换向阀,本发明的特点是机械臂可以在360度工作范围内工作,两个机械臂可同时配合工作,机械臂配备了机械钳、机械钻、机械剪三套末端机械手,可针对不同的场合更换作业,提高了灾难救援机器人的工作效率,拓宽了其工作范围。
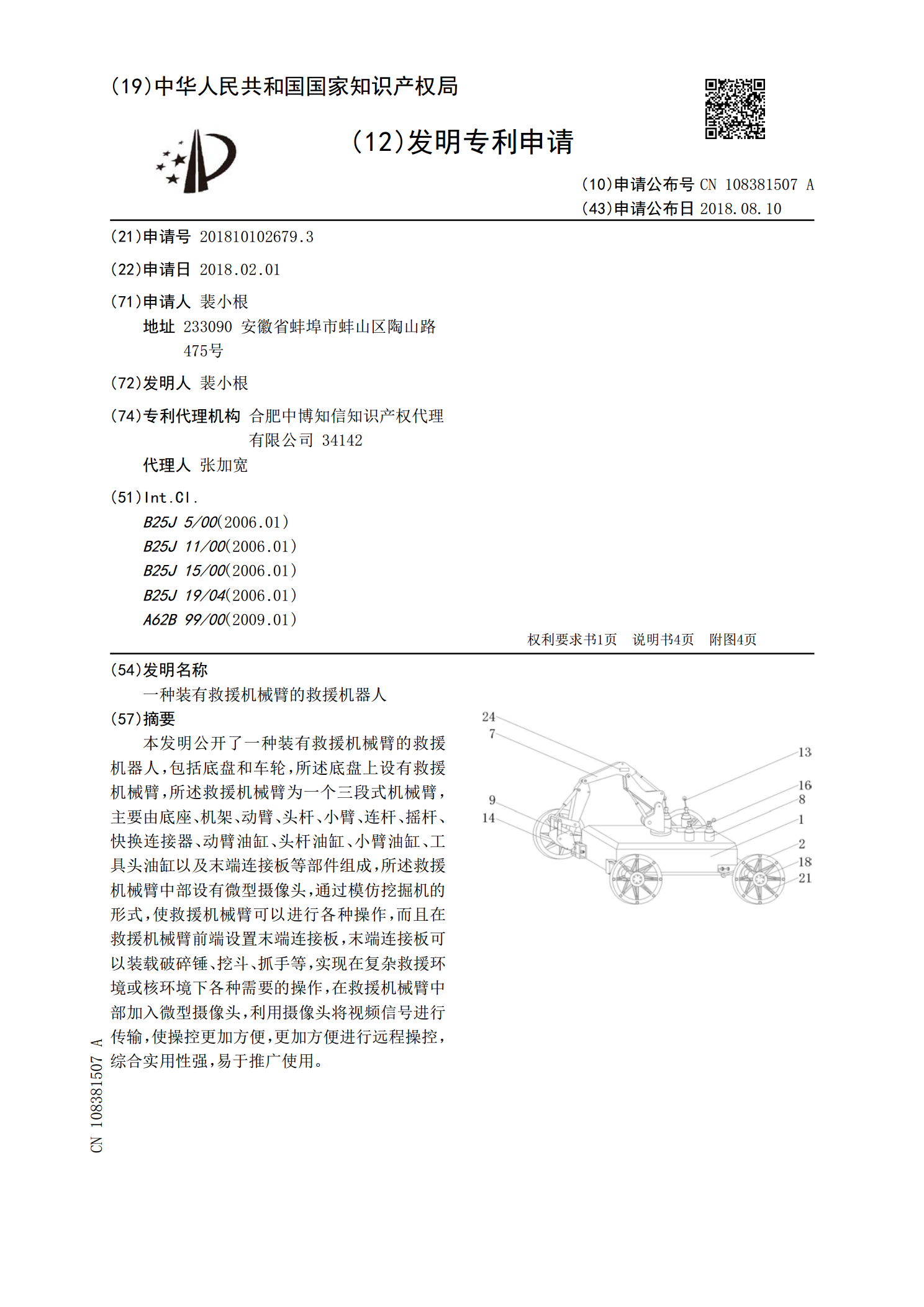
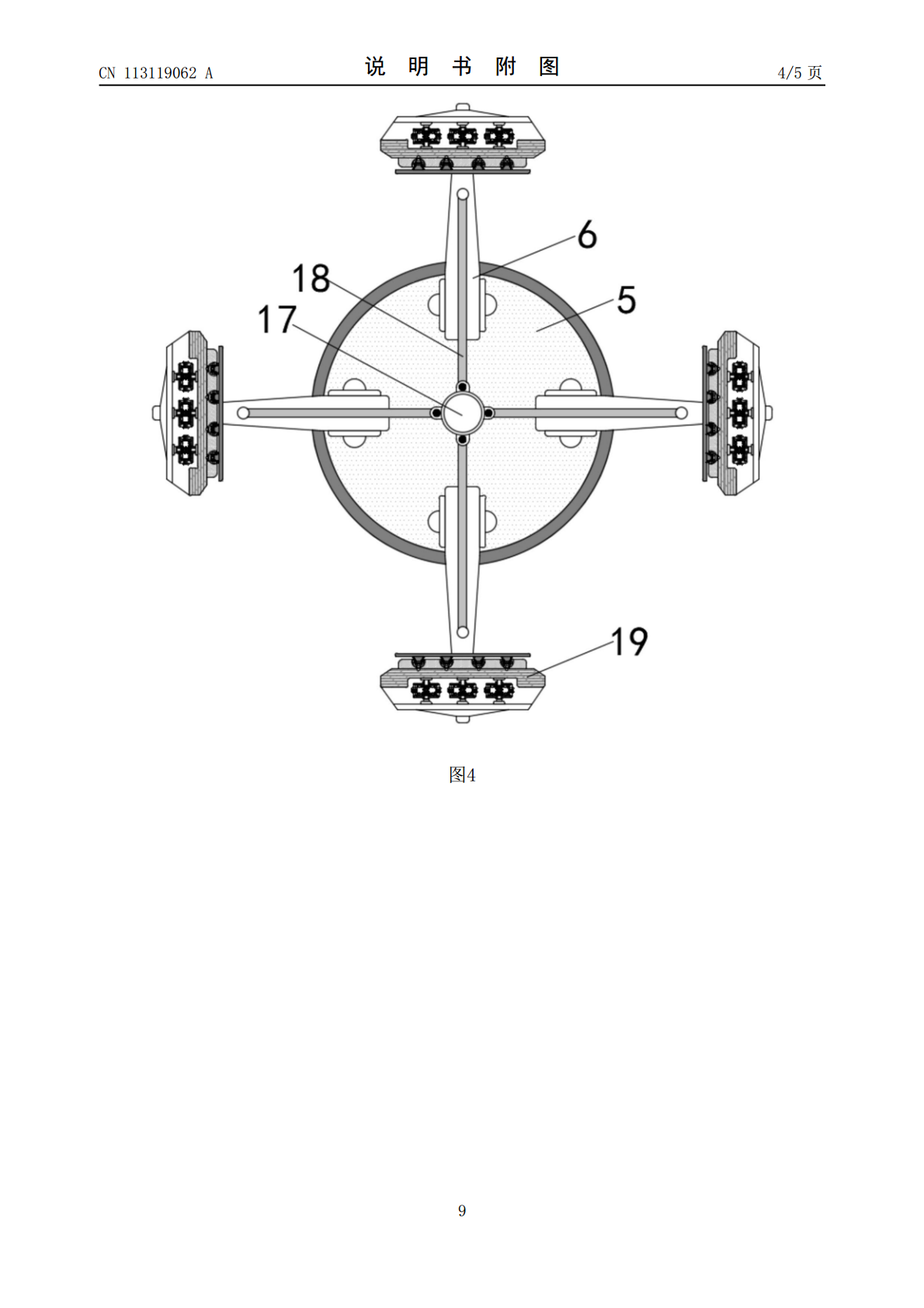
一种装有救援机械臂的救援机器人.pdf
本发明公开了一种装有救援机械臂的救援机器人,包括底盘和车轮,所述底盘上设有救援机械臂,所述救援机械臂为一个三段式机械臂,主要由底座、机架、动臂、头杆、小臂、连杆、摇杆、快换连接器、动臂油缸、头杆油缸、小臂油缸、工具头油缸以及末端连接板等部件组成,所述救援机械臂中部设有微型摄像头,通过模仿挖掘机的形式,使救援机械臂可以进行各种操作,而且在救援机械臂前端设置末端连接板,末端连接板可以装载破碎锤、挖斗、抓手等,实现在复杂救援环境或核环境下各种需要的操作,在救援机械臂中部加入微型摄像头,利用摄像头将视频信号进行传

一种用于机器人的机械臂装置.pdf
本发明公开了一种用于机器人的机械臂装置,包括滑动座、线性滑轨和手部,所述滑动座安装在线性滑轨,且滑动座和线性滑轨滑动连接,所述滑动座的底部转动连接有安装座,所述安装座的底部两侧均固定安装有电机,且电机的输出轴连接有主动齿轮,所述主动齿轮啮合有从动齿轮,且两个从动齿轮相互远离的一侧均设有第一固定杆,所述第一固定杆远离从动齿轮的一端连接有转动圆板,且转动圆板上设有滑动柱,所述安装座的两侧均设有安装杆。本发明的结构简单,经济实用,用于机器人的机械臂装置可通过转动180度将工件从上料位置输送到工作位置,且用于机器

一种用于机器人的机械臂卸载装置.pdf
本发明涉及机器人领域,具体公开了一种用于机器人的机械臂卸载装置,包括:基座;第一手臂,其一端铰接于所述基座上;基座滑轮,其设于所述第一手臂的后侧的所述基座上;齿轮、同步轮,所述齿轮和同步轮以同轴的方式设于位于所述基座侧的所述第一手臂的端部;齿条,其以能够沿所述第一手臂的轴向来回滑动的方式啮合于所述齿轮的下方,所述齿条的一端连接有第一配重块;以及绳索,其一端固定于远离所述基座的所述第一手臂的臂部上,另一端依次环绕所述基座滑轮和所述同步轮后连接一第二配重块。该卸载装置能够依据手臂的倾斜角度动态调整机器人手臂的