
一种自动取药送药护士机器人.pdf

思洁****爱吗


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动取药送药护士机器人.pdf
本发明公开了一种自动取药送药护士机器人,涉及医疗机器人技术领域。本发明包括机器人母体;机器人母体滑动配合有机器人子体;存放架滑动配合有移动架;存放架与移动架之间固定连接有连接弹簧;存放架啮合配合有滑动件;连接杆螺纹转动配合有夹板;电磁线圈与衔铁相互吸引;底座表现滑动配合有放置架。本发明通过护士事先将药物放入各存放室中,通过控制器控制机器人母体移动至机器人子体位置处,通过控制第二电动伸缩调节杆,控制电磁线圈得电,反向启动第一电动伸缩调节杆使得各存放室中的存放壳被拉出,启动伺服电机带动各相邻夹板同步反向移动将
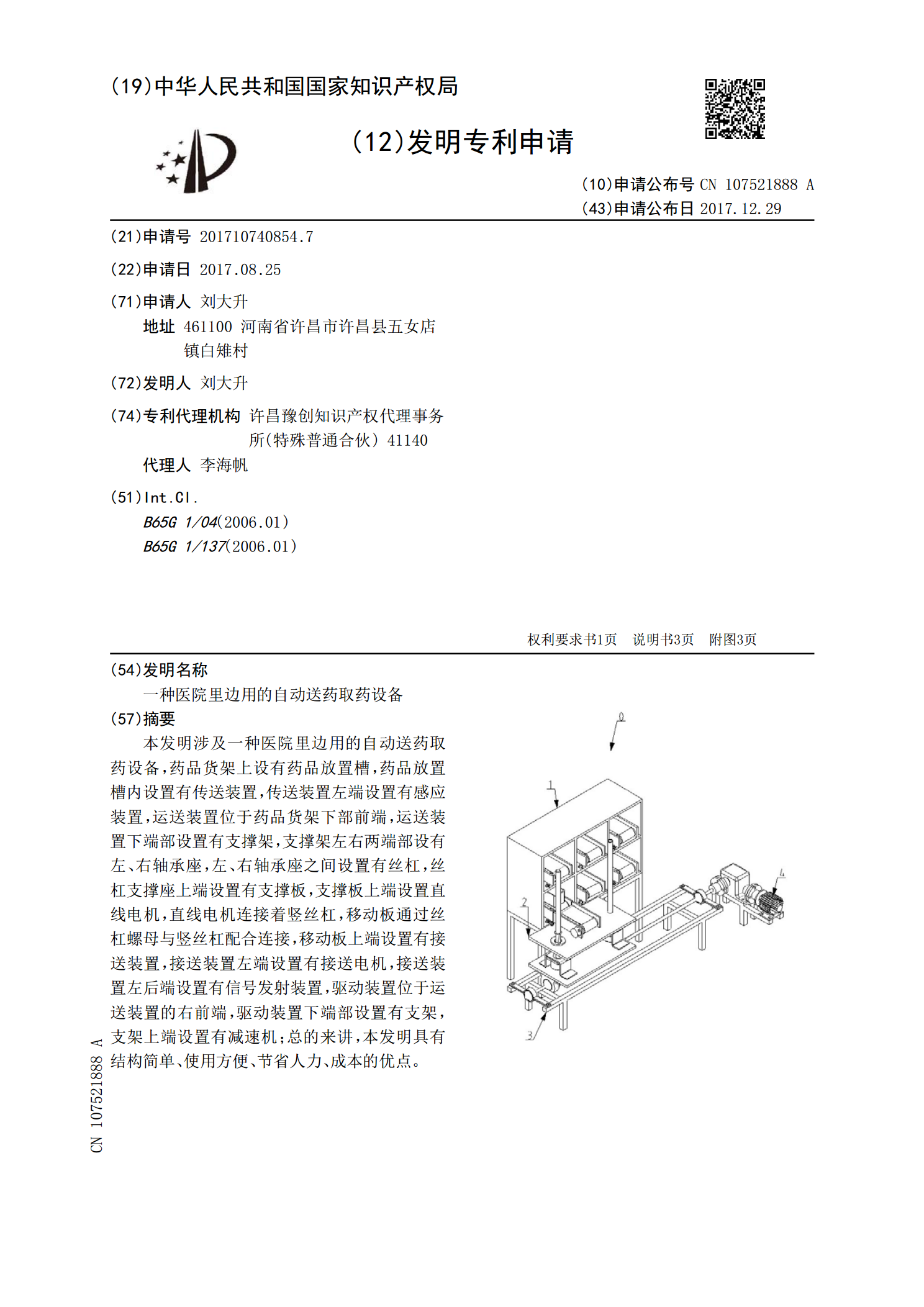
一种医院里边用的自动送药取药设备.pdf
本发明涉及一种医院里边用的自动送药取药设备,药品货架上设有药品放置槽,药品放置槽内设置有传送装置,传送装置左端设置有感应装置,运送装置位于药品货架下部前端,运送装置下端部设置有支撑架,支撑架左右两端部设有左、右轴承座,左、右轴承座之间设置有丝杠,丝杠支撑座上端设置有支撑板,支撑板上端设置直线电机,直线电机连接着竖丝杠,移动板通过丝杠螺母与竖丝杠配合连接,移动板上端设置有接送装置,接送装置左端设置有接送电机,接送装置左后端设置有信号发射装置,驱动装置位于运送装置的右前端,驱动装置下端部设置有支架,支架上端设
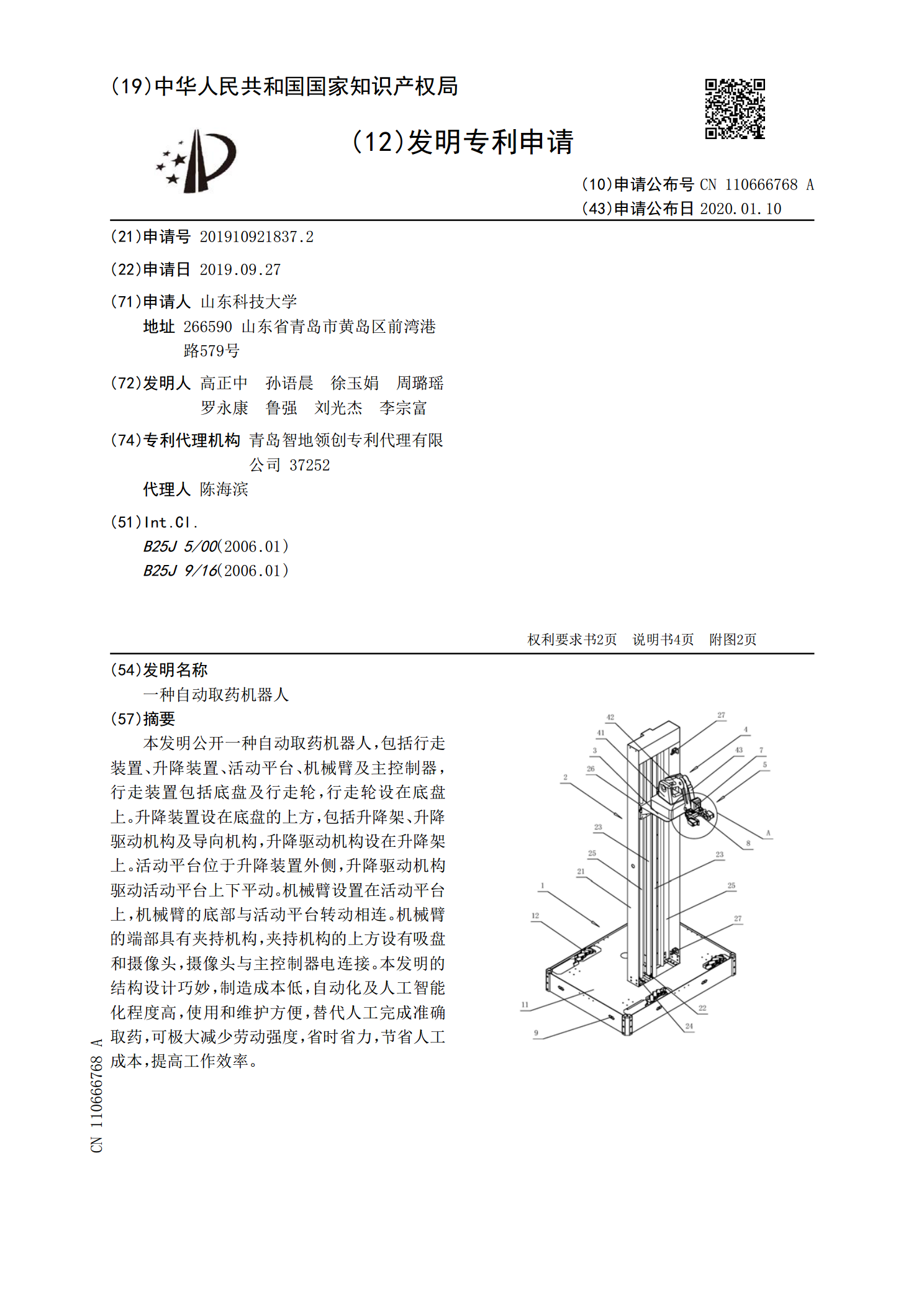
一种自动取药机器人.pdf
本发明公开一种自动取药机器人,包括行走装置、升降装置、活动平台、机械臂及主控制器,行走装置包括底盘及行走轮,行走轮设在底盘上。升降装置设在底盘的上方,包括升降架、升降驱动机构及导向机构,升降驱动机构设在升降架上。活动平台位于升降装置外侧,升降驱动机构驱动活动平台上下平动。机械臂设置在活动平台上,机械臂的底部与活动平台转动相连。机械臂的端部具有夹持机构,夹持机构的上方设有吸盘和摄像头,摄像头与主控制器电连接。本发明的结构设计巧妙,制造成本低,自动化及人工智能化程度高,使用和维护方便,替代人工完成准确取药,可

一种医院取药房送药装置.pdf
本发明涉及一种送药装置,尤其涉及一种医院取药房送药装置。本发明要解决的技术问题是如何提供一种方便取药人员取药,同时医护人员无需频繁抬手将药放置在取药窗口上,并减轻医护人员工作量的医院取药房送药装置。为了解决上述技术问题,本发明提供了这样一种医院取药房送药装置,包括有:支撑架,支撑架顶部安装有斜板;通槽,斜板上开有通槽;导向架,支撑架的一侧安装有导向架;导套,导向架上滑动式地设有导套;安装架,导套上安装有安装架。本发明通过升降机构和送料组件达到了方便取药人员取药,同时医护人员无需频繁抬手将药放置在取药窗口上
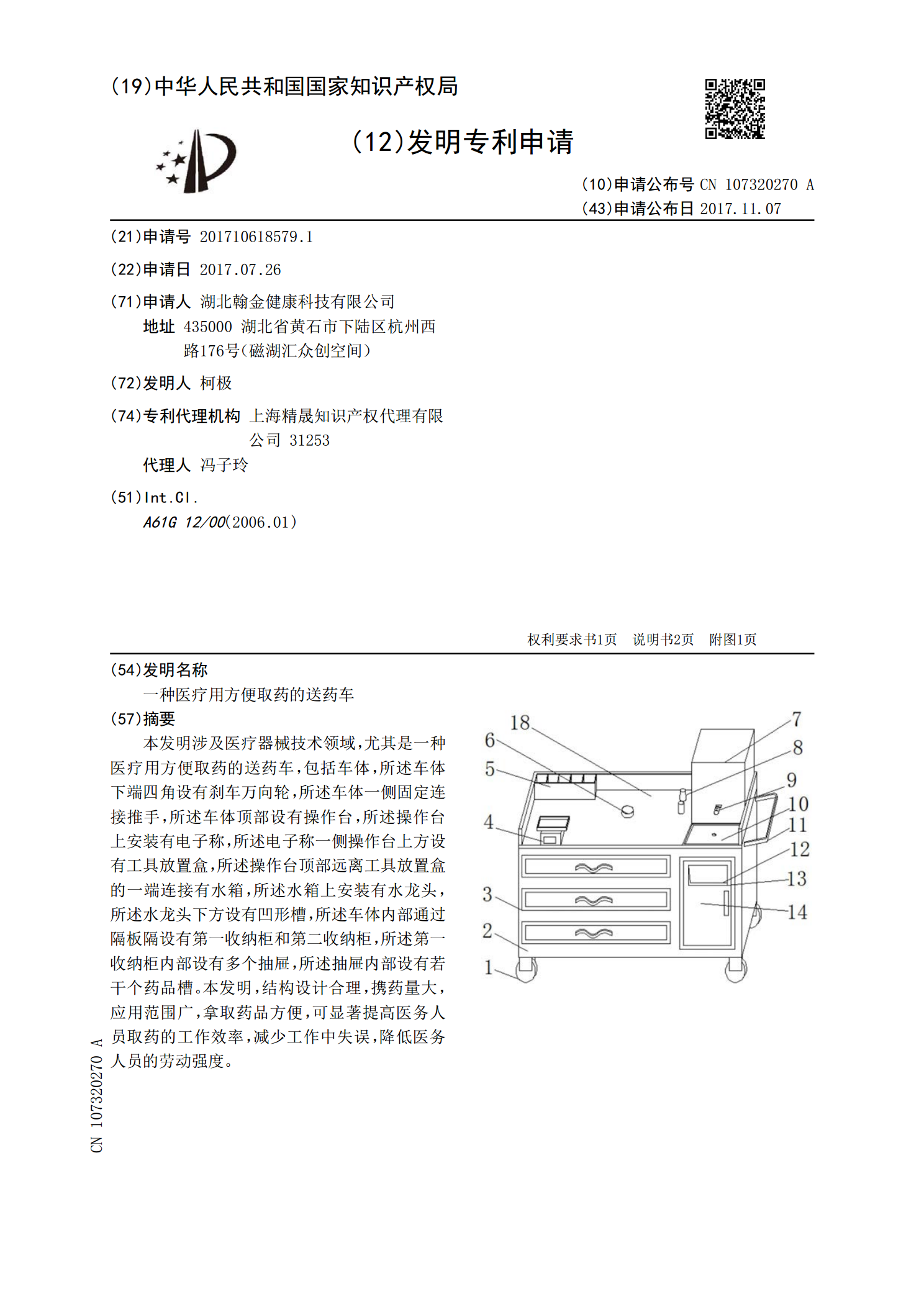
一种医疗用方便取药的送药车.pdf
本发明涉及医疗器械技术领域,尤其是一种医疗用方便取药的送药车,包括车体,所述车体下端四角设有刹车万向轮,所述车体一侧固定连接推手,所述车体顶部设有操作台,所述操作台上安装有电子称,所述电子称一侧操作台上方设有工具放置盒,所述操作台顶部远离工具放置盒的一端连接有水箱,所述水箱上安装有水龙头,所述水龙头下方设有凹形槽,所述车体内部通过隔板隔设有第一收纳柜和第二收纳柜,所述第一收纳柜内部设有多个抽屉,所述抽屉内部设有若干个药品槽。本发明,结构设计合理,携药量大,应用范围广,拿取药品方便,可显著提高医务人员取药的