
多智能体足球机器人系统的协作控制.pdf

my****25


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多智能体足球机器人系统的协作控制.pdf
第36卷第7期哈尔滨工业大学学报Vol136No172004年7月JOURNALOFHARBININSTITUTEOFTECHNOLOGYJuly,2004多智能体足球机器人系统的协作控制楚要钦,李孝安,蒲勇(西北工业大学计算机学院,陕西西安710072,E2mail:dustinli@nwpu.edu.cn)摘要:运用多智能体系统的思想,提出了一种新的多智能体系统协作控制模型,介绍了基于此模型设计的足球机器人系统的策略实现方法,通过实例分析了模型及其策略在系统协作控制方面的性能优越性.关键词:足球机器人

基于多智能体系统的机器人队形控制与协作研究的开题报告.docx
基于多智能体系统的机器人队形控制与协作研究的开题报告一、选题背景近年来,随着机器人技术的发展与应用越来越普及,机器人在工业、军事、家庭服务等领域中得到了广泛的应用。机器人通常需要在协同工作中完成各种任务,例如进行拼装、协作搬运工件等。由于机器人具有较强的重复性、高效性和精度,因此机器人在形成工作队形时更容易实现智能化协作。因此,研究基于多智能体系统的机器人队形控制与协作,对于提高机器人的工作效率和协同工作能力具有重要意义。二、选题意义机器人队形控制与协作技术的研究,可以有效提高机器人的工作效率和通用性,从

基于多智能体强化学习的多机器人协作策略研究.docx
基于多智能体强化学习的多机器人协作策略研究随着机器人技术的不断发展,多机器人协作策略的研究变得越来越重要。而多智能体强化学习则是目前研究的热点之一,它通过多个智能体之间的互动,实现协作行为的学习和优化。本文将详细探讨基于多智能体强化学习的多机器人协作策略研究的意义、方法及应用。一、多机器人协作策略研究的意义多机器人协作策略研究的意义在于实现多台机器人之间的协同工作,从而提高工作效率和工作质量。在某些领域,如救援、探测等,机器人可以替代人工进行行动,但是在这些场景中,一台机器人无法完成任务,需要多个机器人之

多智能体机器人系统控制及其应用阅读随笔.docx
公司亲戚管理制度xx公司亲戚管理制度一、总则1.为了规范公司内部关系,明确公司亲戚的界定和管理,保证公司的正常运营和良好秩序,特制定本制度。2.本制度所称“公司亲戚”,是指与公司存在直接或间接利益关系的亲属,包括但不限于配偶、父母、子女、兄弟姐妹、祖父母、外祖父母、孙子女、外孙子女等。二、亲戚关系界定1.直系亲属:指相互之间具有血缘关系的亲属,包括父母、子女、祖父母、外祖父母、孙子女、外孙子女等。2.旁系亲属:指相互之间具有婚姻关系的亲属,包括兄弟姐妹、叔伯姑舅、侄甥、外甥女等。3.远亲:指相互之间具有血
一种多智能体攀爬机器人系统及其控制方法.pdf
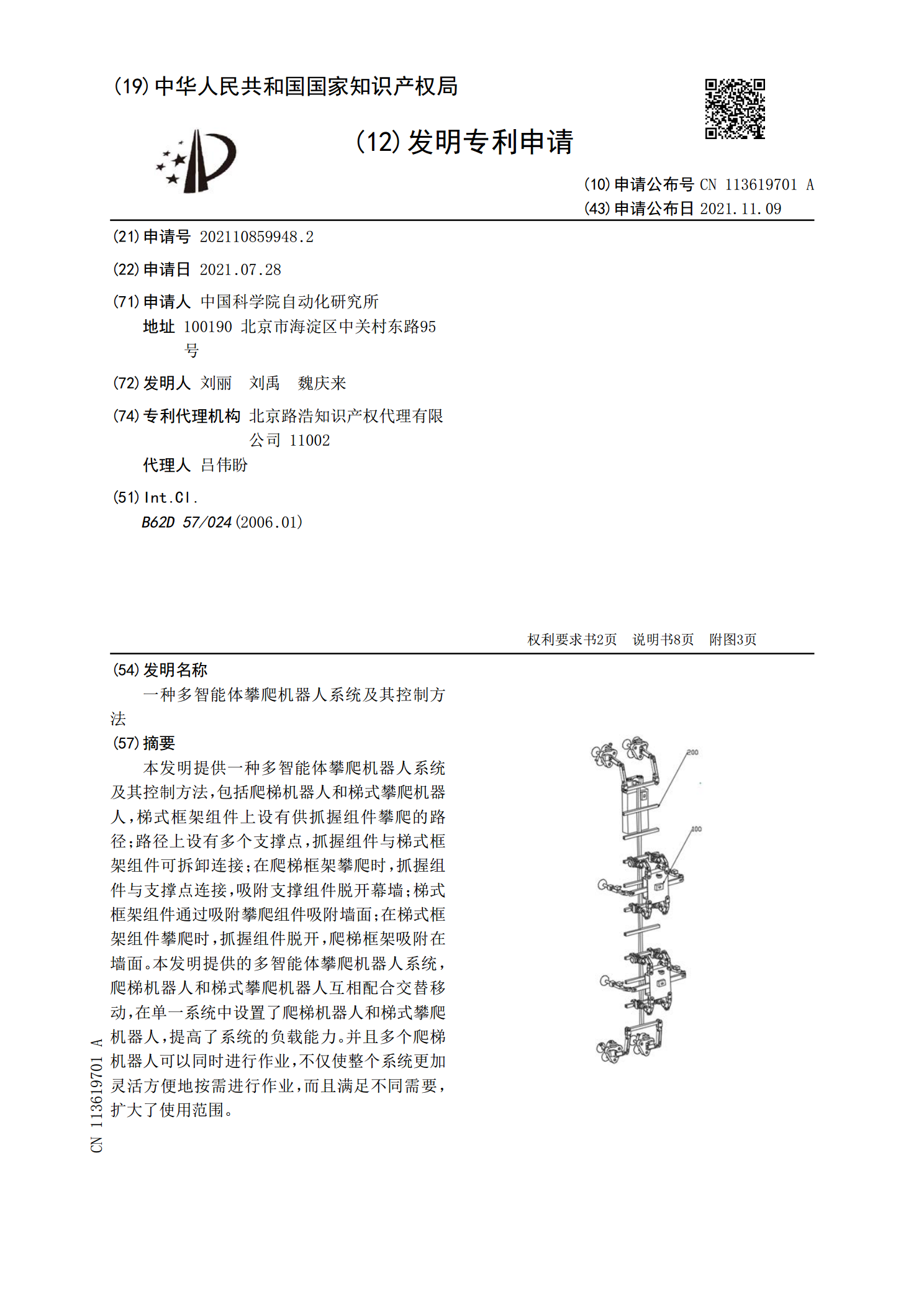
本发明提供一种多智能体攀爬机器人系统及其控制方法,包括爬梯机器人和梯式攀爬机器人,梯式框架组件上设有供抓握组件攀爬的路径;路径上设有多个支撑点,抓握组件与梯式框架组件可拆卸连接;在爬梯框架攀爬时,抓握组件与支撑点连接,吸附支撑组件脱开幕墙;梯式框架组件通过吸附攀爬组件吸附墙面;在梯式框架组件攀爬时,抓握组件脱开,爬梯框架吸附在墙面。本发明提供的多智能体攀爬机器人系统,爬梯机器人和梯式攀爬机器人互相配合交替移动,在单一系统中设置了爬梯机器人和梯式攀爬机器人,提高了系统的负载能力。并且多个爬梯机器人可以同时进