
基于状态模型的CAN总线系统的仿真.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CAN总线的UUV通信系统与仿真.docx
基于CAN总线的UUV通信系统与仿真摘要:本文针对无人水下航行器(UUV)通信系统的设计与仿真展开研究。通过对UUV通信系统的机制与通信协议进行分析,确定了CAN总线作为UUV通信系统的主要技术方案。在此基础上,针对UUV通信系统的特点,提出了一种基于CAN总线的通信系统设计方案,包括硬件组成、网络拓扑、通信协议等方面的设计。同时,通过使用模拟软件进行仿真实验,验证了系统的可行性和性能。关键词:UUV;CAN总线;通信协议;仿真实验一、绪论随着无人航行器技术的不断发展,无人水下航行器(UUV)在水下资源勘

基于CAN总线的汽车监控仿真系统.docx
基于CAN总线的汽车监控仿真系统概述:CAN总线是一种现代化的信息通讯协议,常用于汽车控制系统中。本文将会介绍基于CAN总线的汽车监控仿真系统。第一部分:CAN总线介绍CAN总线,即控制器局域网,是由Bosch公司在1986年开发出来的一种高可靠性的总线标准。CAN总线协议在汽车电子领域被广泛应用,其在实时控制和数据通信方面有着重要的作用。CAN总线的优点在于具有高带宽、高可靠性、低成本、可扩展等特点。因此,它成为了现代汽车电子控制系统的标配。第二部分:汽车监控仿真系统汽车监控仿真系统是一种通过模拟来测试

基于CAN总线的状态信息检测系统设计.docx
基于CAN总线的状态信息检测系统设计基于CAN总线的状态信息检测系统设计摘要CAN总线是一种用于实时通信的串行通信协议,广泛应用于汽车、工业自动化等领域。本论文旨在设计一种基于CAN总线的状态信息检测系统,用于实时监测和诊断车辆的状态信息。论文首先介绍了CAN总线的基本原理和通信特点,然后详细描述了系统的设计和实现过程,包括硬件电路设计、软件程序编写以及CAN总线通信控制方法等。最后,通过实验验证了系统的可行性和有效性,并总结了设计中存在的问题和改进方向。关键词:CAN总线、状态信息检测、实时监测、诊断、

基于CAN总线的叉车状态监测系统的设计.docx
基于CAN总线的叉车状态监测系统的设计本文将探讨基于CAN总线的叉车状态监测系统的设计。叉车是企业物流的重要设备之一,其正常运行对企业的正常生产运营和资金收入息息相关。因此,进行叉车状态监测具有重要的实际意义。CAN总线被普遍应用于工业现场,可以实现物品的数据传输。因此,本文将设计基于CAN总线的叉车状态监测系统。首先,通过分析叉车的运行特点,我们可以确定需要检测的关键参数和传感器种类。一般而言,叉车需要检测的关键参数包括轮胎压力、剩余电量、运行时间、启停时间、油量、水温等,可以通过相应的传感器进行监测。
一种基于CAN总线的多路CAN仿真系统.pdf
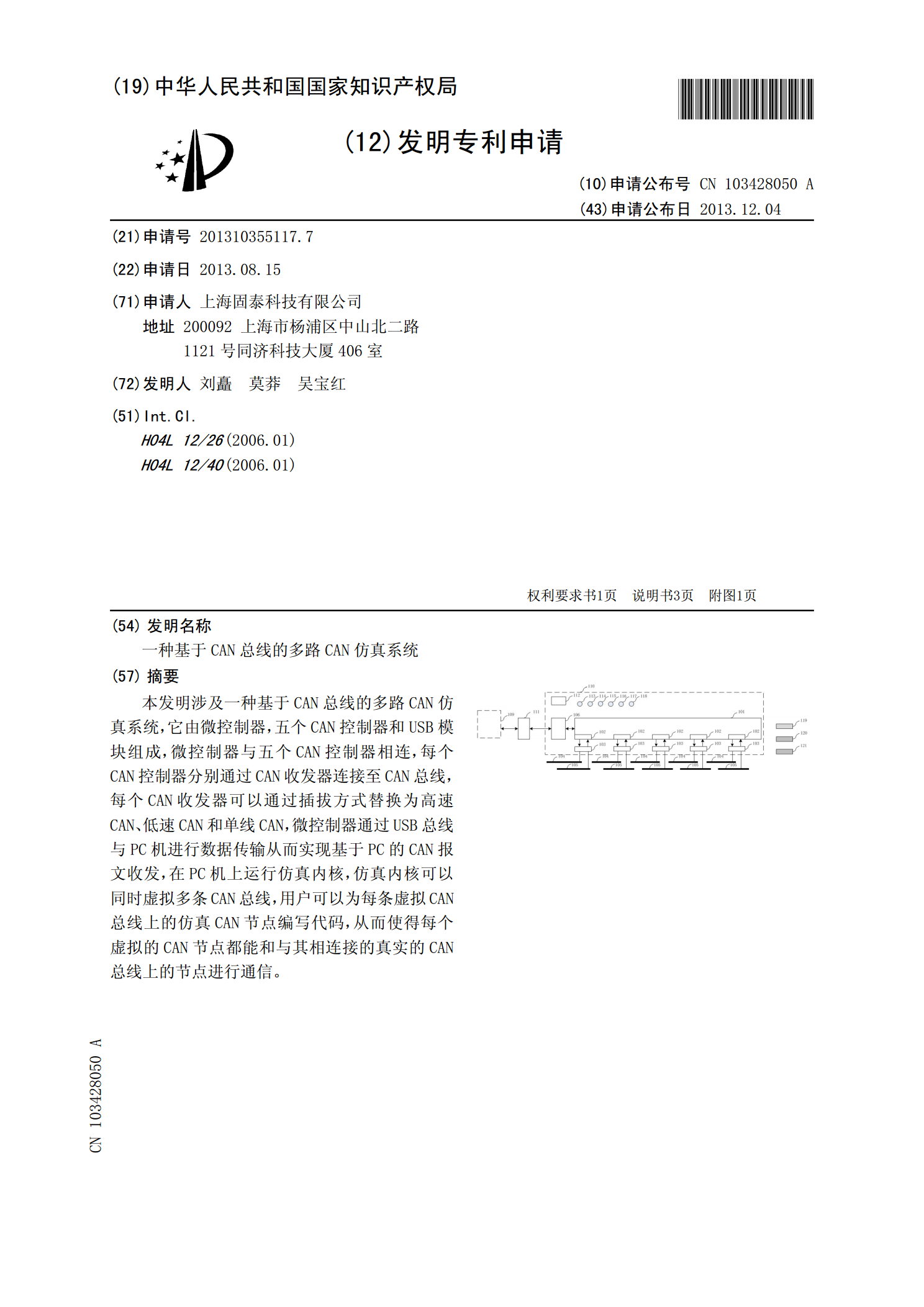
本发明涉及一种基于CAN总线的多路CAN仿真系统,它由微控制器,五个CAN控制器和USB模块组成,微控制器与五个CAN控制器相连,每个CAN控制器分别通过CAN收发器连接至CAN总线,每个CAN收发器可以通过插拔方式替换为高速CAN、低速CAN和单线CAN,微控制器通过USB总线与PC机进行数据传输从而实现基于PC的CAN报文收发,在PC机上运行仿真内核,仿真内核可以同时虚拟多条CAN总线,用户可以为每条虚拟CAN总线上的仿真CAN节点编写代码,从而使得每个虚拟的CAN节点都能和与其相连接的真实的CAN总