
基于图像轮廓尖锐度的自适应角点检测方法.pdf

志玉****爱啊


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于图像轮廓尖锐度的自适应角点检测方法.pdf
本发明涉及一种基于图像轮廓尖锐度的自适应角点检测方法,首先利用边缘检测算子提取图像边缘,计算边缘上各点的尖锐度;对于每一条边缘,以边缘上各点的尖锐度的均值作为阈值,选取尖锐度大于该阈值的点作为候选角点;然后在候选角点的支撑区域内将候选角点向支撑边缘的拟合直线进行投影,计算此候选角点与其投影点之间的距离,对该距离设定一个阈值,小于该阈值的点作为凸出点予以滤除;最后当有多个候选角点相邻接时,根据连接权值最大优先,尖锐度最大次之的原则将多个候选角点合并为一个角点,得到最终的图像角点。本发明检测准确度高,抗干扰能

基于图像尖锐度的角点匹配算法.pptx
基于图像尖锐度的角点匹配算法目录添加目录项标题算法概述算法定义算法应用场景算法优缺点算法原理图像尖锐度定义角点检测算法角点匹配算法算法流程算法实现图像预处理角点检测角点匹配结果输出算法性能评估评估指标实验结果结果分析性能比较算法改进方向算法优化算法扩展性研究算法与其他技术的结合研究感谢观看

基于图像轮廓的角点提取方法及装置.pdf
本发明公开的基于图像轮廓的角点提取方法,包括:当提取图像轮廓之后,使用“k-余弦曲率”法从图像轮廓的轮廓点中提取显著角点,其中,所述显著角点为曲率大于预设曲率的点;使用拟合算法生成每两个所述显著角点之间轮廓点对应的轮廓曲线描述数据;当所述轮廓曲线描述数据与标准数据的差值大于预设阈值时,按照预设规则从所述轮廓点中提取弱角点,其中,所述弱角点为曲率小于预设曲率的点。本发明还公开了一种基于图像轮廓的角点提取装置。与现有技术相比,本方案能够将图像轮廓中的角点更加全面精确的提取出,保证得到的轮廓段更加准确,进而能够
基于轮廓相似度的图像比较方法.pdf
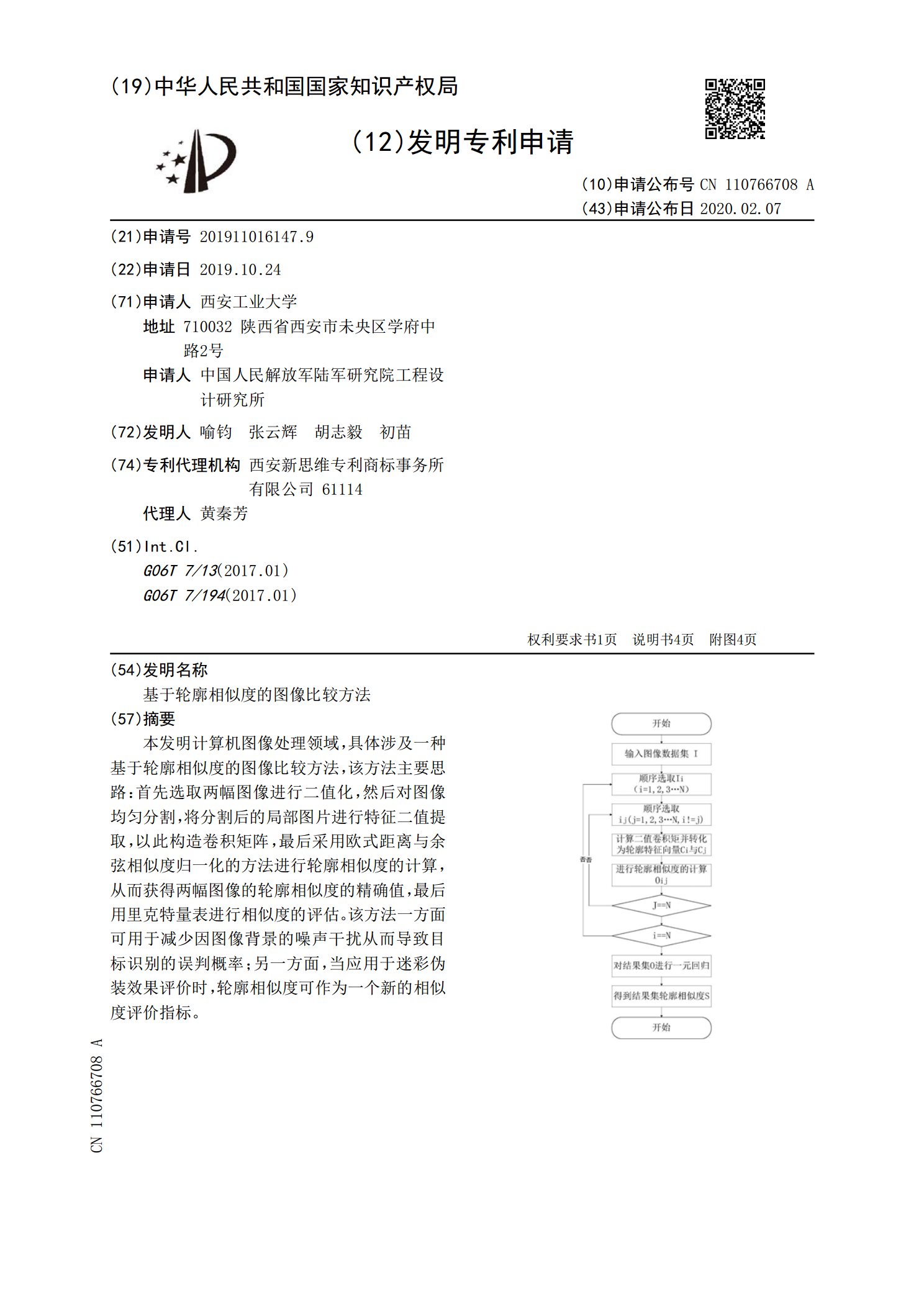
本发明计算机图像处理领域,具体涉及一种基于轮廓相似度的图像比较方法,该方法主要思路:首先选取两幅图像进行二值化,然后对图像均匀分割,将分割后的局部图片进行特征二值提取,以此构造卷积矩阵,最后采用欧式距离与余弦相似度归一化的方法进行轮廓相似度的计算,从而获得两幅图像的轮廓相似度的精确值,最后用里克特量表进行相似度的评估。该方法一方面可用于减少因图像背景的噪声干扰从而导致目标识别的误判概率;另一方面,当应用于迷彩伪装效果评价时,轮廓相似度可作为一个新的相似度评价指标。

基于图像轮廓的角点检测方法研究的开题报告.docx
基于图像轮廓的角点检测方法研究的开题报告开题报告题目:基于图像轮廓的角点检测方法研究一、选题背景角点是计算机视觉、图像处理、机器人等领域中的重要特征点。角点的特点是在该位置上,图像灰度值沿着至少两个方向上有明显的变化。角点通常用于图像配准、物体识别和跟踪等任务,因此角点检测技术在图像处理中具有重要的应用价值。当前角点检测技术主要分为基于局部特征、基于全局特征以及基于轮廓特征三大类。其中,基于局部特征的方法较为常见,如Harris角点检测、SIFT特征点检测等,但这些方法常常受到噪声和图像变形等因素影响,检