
一种基于时域双向迭代的叶轮机叶片颤振应力预测方法.pdf

霞英****娘子

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于时域双向迭代的叶轮机叶片颤振应力预测方法.pdf
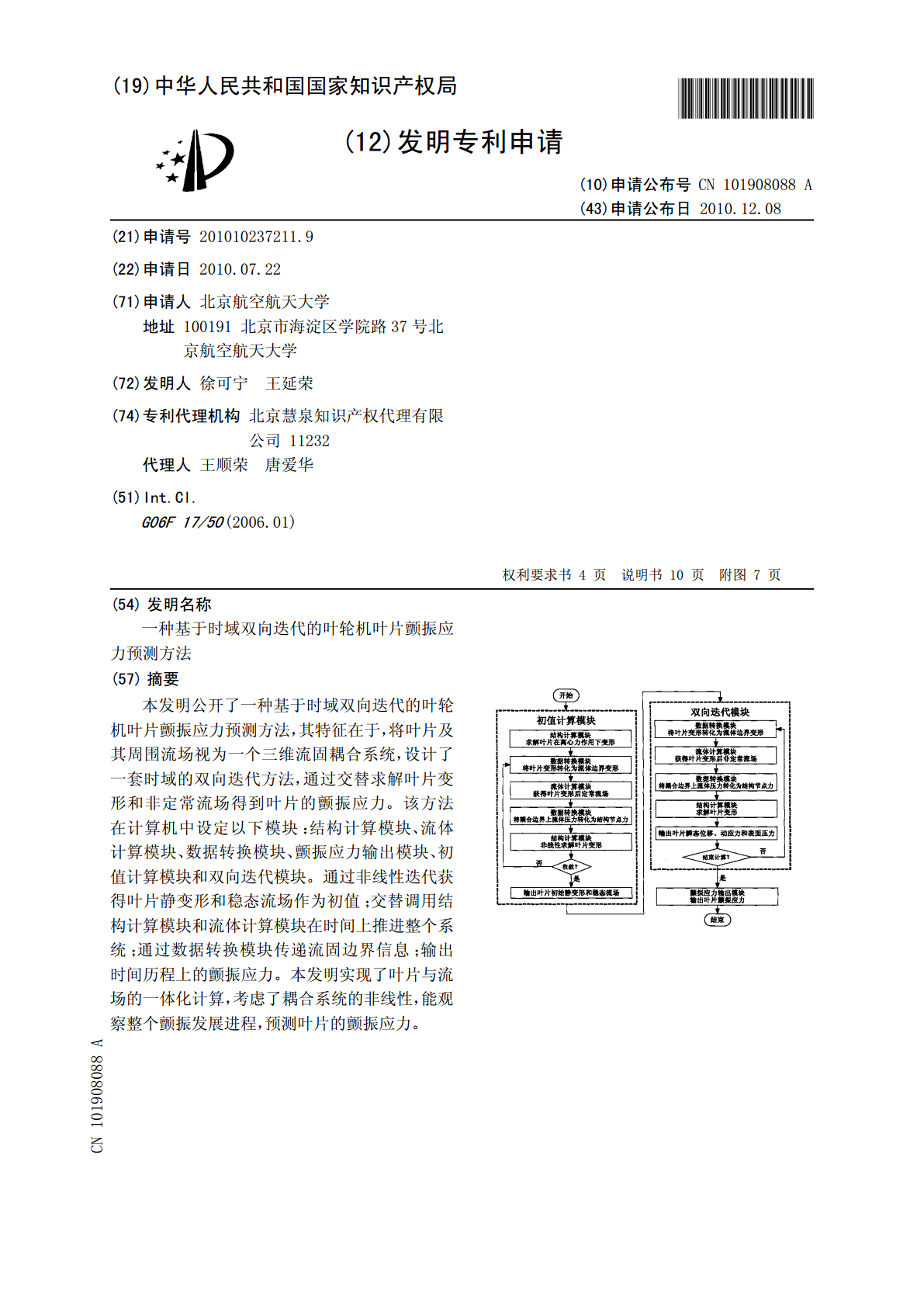
本发明公开了一种基于时域双向迭代的叶轮机叶片颤振应力预测方法,其特征在于,将叶片及其周围流场视为一个三维流固耦合系统,设计了一套时域的双向迭代方法,通过交替求解叶片变形和非定常流场得到叶片的颤振应力。该方法在计算机中设定以下模块:结构计算模块、流体计算模块、数据转换模块、颤振应力输出模块、初值计算模块和双向迭代模块。通过非线性迭代获得叶片静变形和稳态流场作为初值;交替调用结构计算模块和流体计算模块在时间上推进整个系统;通过数据转换模块传递流固边界信息;输出时间历程上的颤振应力。本发明实现了叶片与流场的一体

基于时域仿真法的断续铣削颤振预测.docx
基于时域仿真法的断续铣削颤振预测基于时域仿真法的断续铣削颤振预测摘要断续铣削颤振在加工过程中是一种常见的问题,它不仅会影响加工质量,还会对加工效率和工具寿命产生负面影响。因此,对断续铣削颤振进行准确预测和控制具有重要意义。本论文将基于时域仿真法,对断续铣削颤振进行预测。首先,介绍了断续铣削颤振的基本原理和机理。然后,详细说明了时域仿真法的原理和步骤,并给出了数值模拟实例进行验证。最后,归纳总结了本文的研究成果,并对未来的研究方向进行了展望。1.引言随着现代制造业的发展,断续铣削成为一种常用的加工方式。然而

蒸汽轮机叶片颤振研究.docx
蒸汽轮机叶片颤振研究蒸汽轮机叶片颤振研究摘要:蒸汽轮机是一种常见的能量转换装置,而叶片颤振是蒸汽轮机中常见的故障之一。本文通过对叶片颤振的原因、影响、监测和控制方法等方面进行研究和分析,旨在为蒸汽轮机的维护和故障排除提供一定的理论和实践依据。1.引言蒸汽轮机是一种将热能转化为机械能的装置,其核心部分是转子,而转子上的叶片是将热能转化为机械能的关键元件。然而,由于运行环境复杂和工作条件的变化,叶片颤振常常会在蒸汽轮机中发生。叶片颤振不仅会导致设备损坏和性能下降,还会引发严重的安全事故。因此,对蒸汽轮机叶片颤

翼型颤振分析的时域方法.docx
翼型颤振分析的时域方法翼型颤振是飞行器结构的一种常见振动模式,也是飞行安全中需要重点关注的问题之一。其发生的原因主要是气动效应与结构的相互作用所致,在飞行器设计中需要进行准确的翼型颤振分析,以避免翼型颤振对飞行器的破坏性影响。时域方法是一种常见的翼型颤振分析方法,本文将介绍时域方法的原理、步骤及优缺点。时域方法是一种基于时间的分析方法,将结构响应与载荷之间的关系用时间来表示,通过分析结构物在时间内的变化来进行分析。其主要基于牛顿第二定律和哈密顿原理,将结构的动力学方程转化为常微分方程组,并通过数值计算求解

蒸汽轮机长叶片颤振预估方法研究.docx
蒸汽轮机长叶片颤振预估方法研究蒸汽轮机长叶片颤振预估方法研究摘要:蒸汽轮机是现代热能转换设备的关键组成部分,长叶片颤振是蒸汽轮机运行中经常遇到的问题之一。长叶片颤振会导致叶片疲劳、振动噪声和不稳定运行等严重后果。因此,预估长叶片颤振的方法研究对蒸汽轮机的安全运行至关重要。本文从叶片设计、气动和动力特性等方面综述了蒸汽轮机长叶片颤振预估的方法。1.引言蒸汽轮机是一种重要的动力设备,广泛应用于发电厂、化工厂等行业。长叶片颤振是蒸汽轮机工作过程中的一种振动问题,如果不及时预估和解决,会对蒸汽轮机的安全运行带来严