
正弦条纹投影装置以及三维轮廓测量方法.pdf

猫巷****忠娟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

正弦条纹投影装置以及三维轮廓测量方法.pdf
本发明公开了三种正弦条纹投影装置以及一种利用该正弦条纹投影装置实现的三维轮廓测量方法,该方法包括:S1、校正从该正弦条纹投影装置出射的各波长光的强度;S2、获取各波长条纹间的实际相位移;S3、进行该相机的标定,并依次对各波长条纹投影进行相位-高度标定;S4、通过该投影装置依次将各波长条纹投影至被测物,通过相机拍摄被测物表面的各波长条纹投影图像,然后根据各波长条纹投影图像计算出各观测点的初始相位,并对该些初始相位解包裹;S5、根据相位-高度标定由各观测点的经过解包裹的初始相位分别获取该个观测点的高度坐标,再
基于经验曲波变换的条纹投影轮廓术的形貌测量方法.pdf
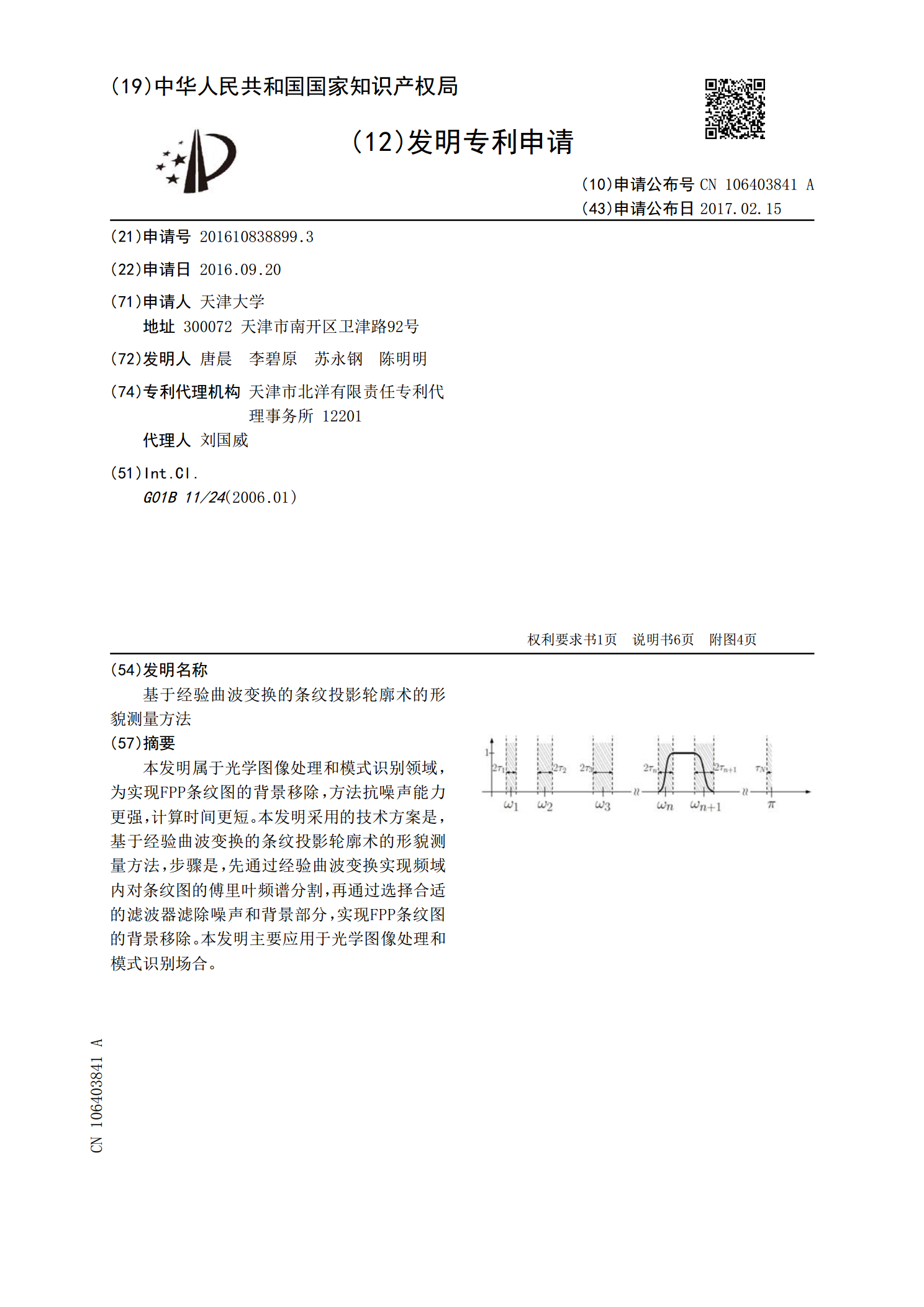
本发明属于光学图像处理和模式识别领域,为实现FPP条纹图的背景移除,方法抗噪声能力更强,计算时间更短。本发明采用的技术方案是,基于经验曲波变换的条纹投影轮廓术的形貌测量方法,步骤是,先通过经验曲波变换实现频域内对条纹图的傅里叶频谱分割,再通过选择合适的滤波器滤除噪声和背景部分,实现FPP条纹图的背景移除。本发明主要应用于光学图像处理和模式识别场合。

基于两幅光栅条纹投影的三维轮廓术的开题报告.docx
基于两幅光栅条纹投影的三维轮廓术的开题报告一、选题的背景和意义在现实生活中,我们需要不断地对各种物体进行测量,以获取它们的形态和结构信息。传统的测量方法通常需要进行接触式测量或视觉测量,不仅需要较长的时间,而且还会对测量对象产生破坏。随着科技的不断发展,光学测量方法已成为一种高效、无损、精确度高的测量方法。其中,基于光栅条纹投影的三维轮廓术具有快速高效、精度高等优点,被广泛应用于不同领域的三维形态测量中。基于光栅条纹投影的三维轮廓术利用相机记录物体表面的光斑位置和形貌,结合光栅的周期性变化,对物体的三维形
基于条纹投影轮廓术的高效相位‑三维映射方法及系统.pdf
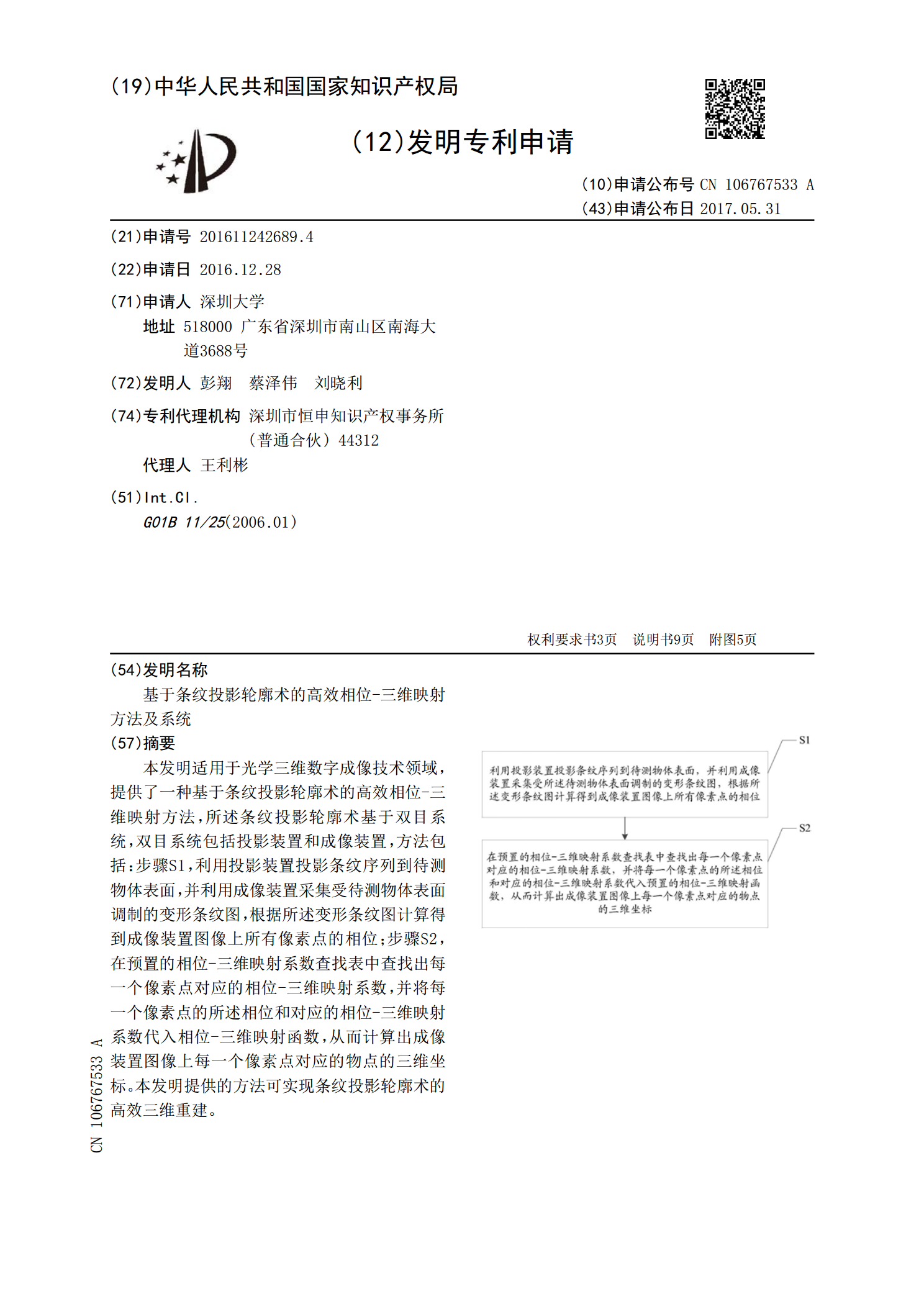
本发明适用于光学三维数字成像技术领域,提供了一种基于条纹投影轮廓术的高效相位‑三维映射方法,所述条纹投影轮廓术基于双目系统,双目系统包括投影装置和成像装置,方法包括:步骤S1,利用投影装置投影条纹序列到待测物体表面,并利用成像装置采集受待测物体表面调制的变形条纹图,根据所述变形条纹图计算得到成像装置图像上所有像素点的相位;步骤S2,在预置的相位‑三维映射系数查找表中查找出每一个像素点对应的相位‑三维映射系数,并将每一个像素点的所述相位和对应的相位‑三维映射系数代入相位‑三维映射函数,从而计算出成像装置图像
一种基于激光MEMS投影的柔性三维轮廓测量方法及装置.pdf
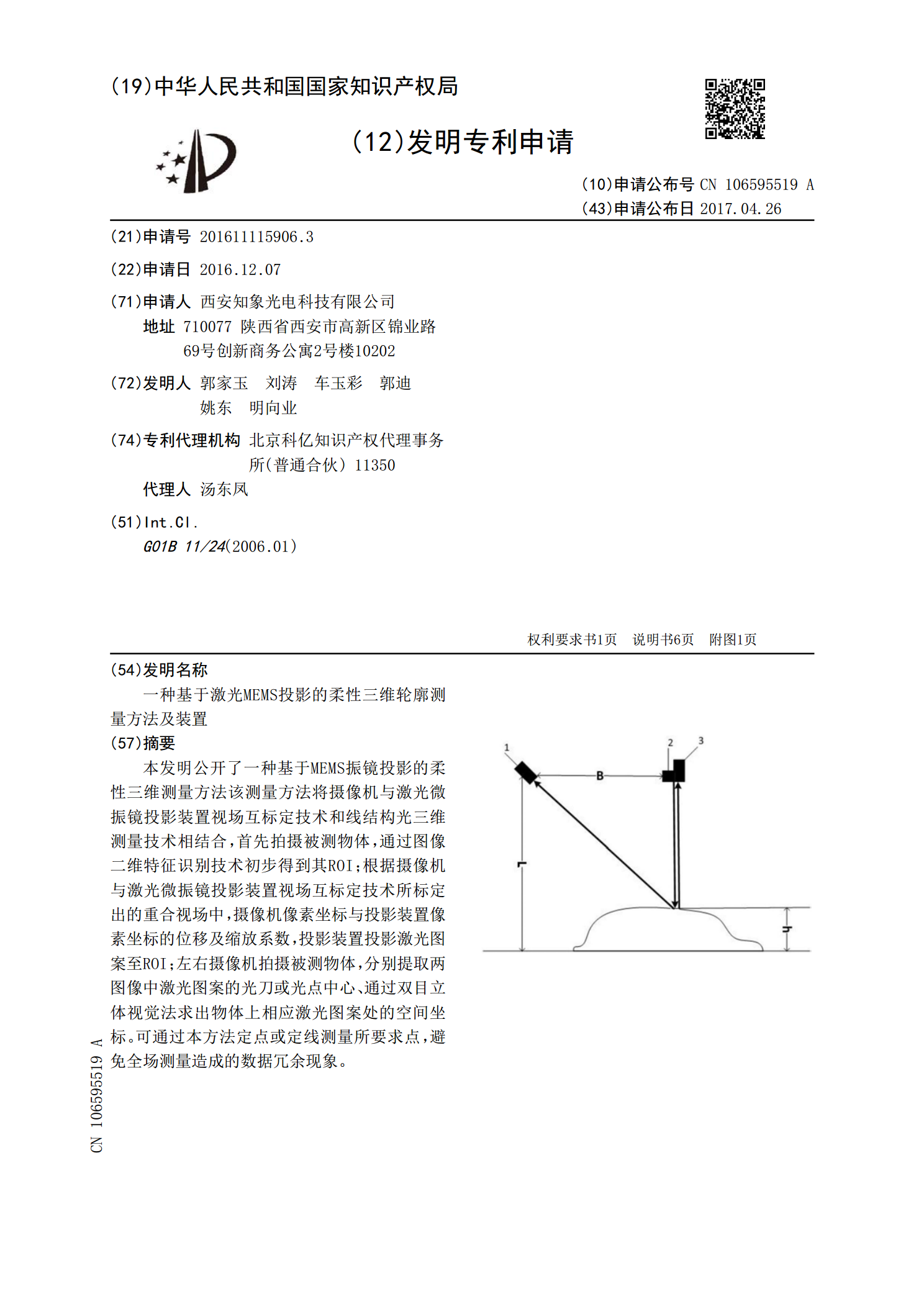
本发明公开了一种基于MEMS振镜投影的柔性三维测量方法该测量方法将摄像机与激光微振镜投影装置视场互标定技术和线结构光三维测量技术相结合,首先拍摄被测物体,通过图像二维特征识别技术初步得到其ROI;根据摄像机与激光微振镜投影装置视场互标定技术所标定出的重合视场中,摄像机像素坐标与投影装置像素坐标的位移及缩放系数,投影装置投影激光图案至ROI;左右摄像机拍摄被测物体,分别提取两图像中激光图案的光刀或光点中心、通过双目立体视觉法求出物体上相应激光图案处的空间坐标。可通过本方法定点或定线测量所要求点,避免全场测量