
机器人的垂直弹跳机构.pdf

努力****元恺


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人的垂直弹跳机构.pdf
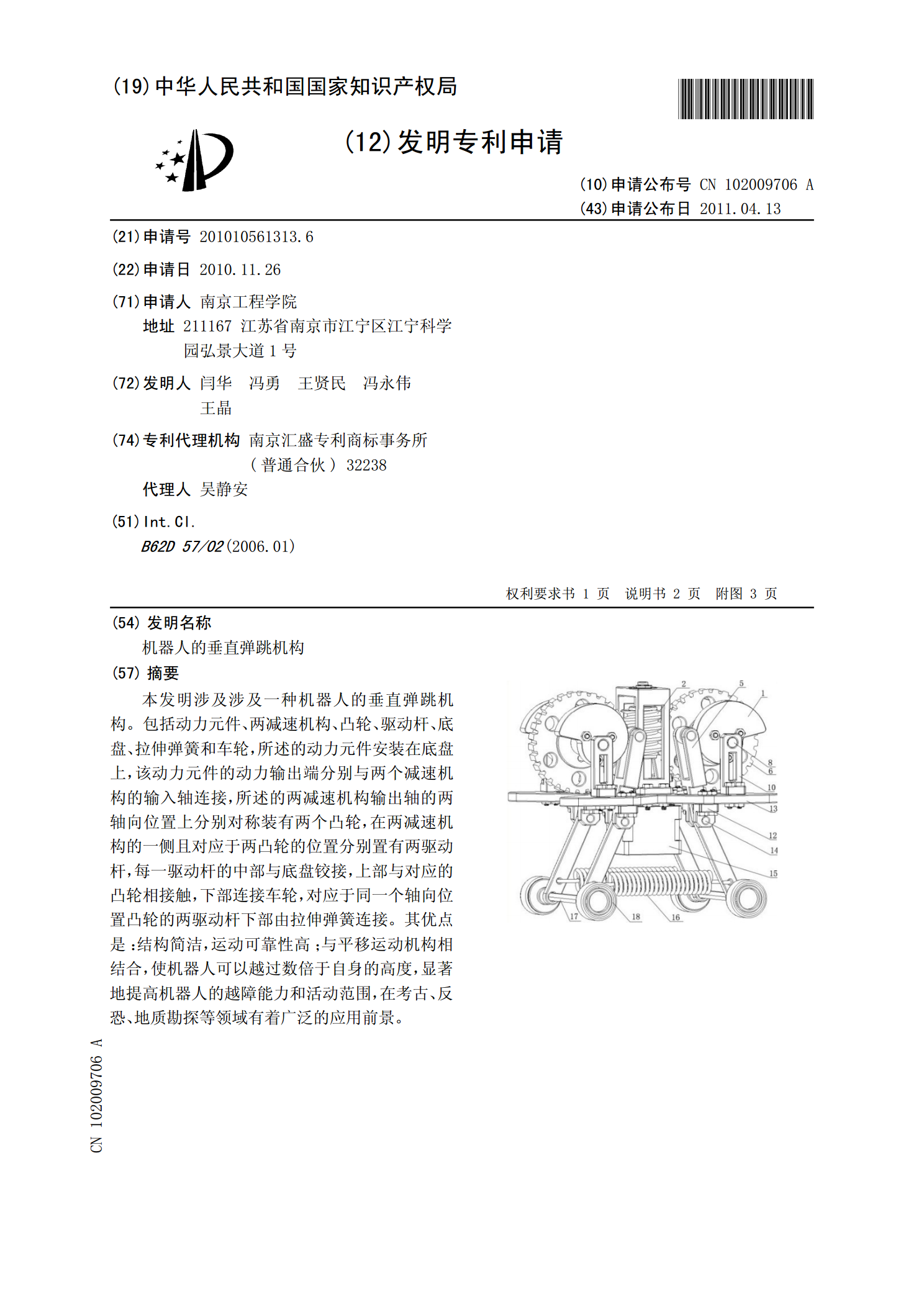
本发明涉及涉及一种机器人的垂直弹跳机构。包括动力元件、两减速机构、凸轮、驱动杆、底盘、拉伸弹簧和车轮,所述的动力元件安装在底盘上,该动力元件的动力输出端分别与两个减速机构的输入轴连接,所述的两减速机构输出轴的两轴向位置上分别对称装有两个凸轮,在两减速机构的一侧且对应于两凸轮的位置分别置有两驱动杆,每一驱动杆的中部与底盘铰接,上部与对应的凸轮相接触,下部连接车轮,对应于同一个轴向位置凸轮的两驱动杆下部由拉伸弹簧连接。其优点是:结构简洁,运动可靠性高;与平移运动机构相结合,使机器人可以越过数倍于自身的高度,显
基于电机驱动的机器人垂直弹跳机构.pdf
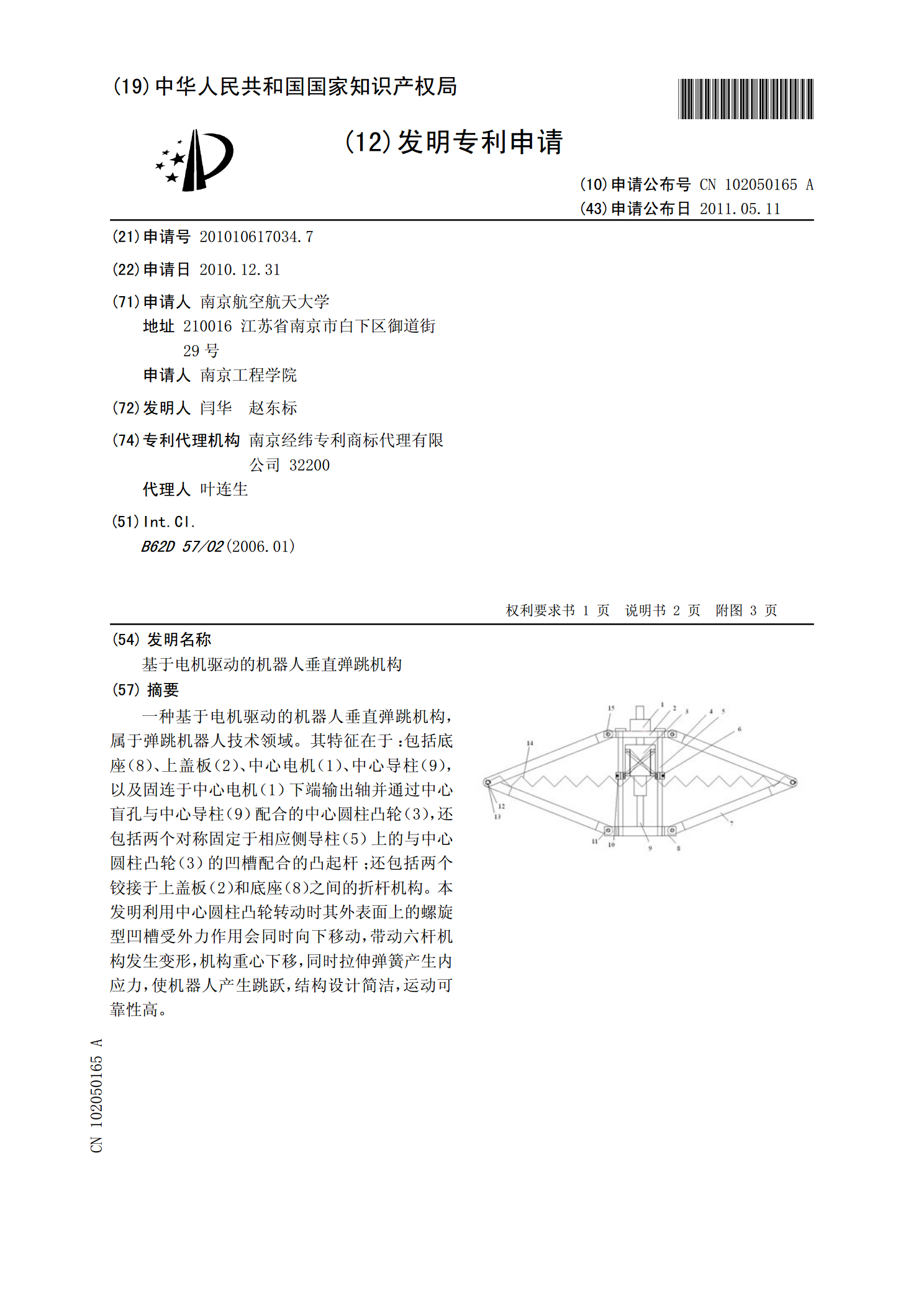
一种基于电机驱动的机器人垂直弹跳机构,属于弹跳机器人技术领域。其特征在于:包括底座(8)、上盖板(2)、中心电机(1)、中心导柱(9),以及固连于中心电机(1)下端输出轴并通过中心盲孔与中心导柱(9)配合的中心圆柱凸轮(3),还包括两个对称固定于相应侧导柱(5)上的与中心圆柱凸轮(3)的凹槽配合的凸起杆;还包括两个铰接于上盖板(2)和底座(8)之间的折杆机构。本发明利用中心圆柱凸轮转动时其外表面上的螺旋型凹槽受外力作用会同时向下移动,带动六杆机构发生变形,机构重心下移,同时拉伸弹簧产生内应力,使机器人产生

基于介电型EAP驱动的机器人垂直弹跳机构.pdf
一种基于介电型EAP驱动的机器人垂直弹跳机构,属于弹跳机器人技术领域。包括底座(13)、上盖板(1)、EAP驱动器组件、中心导柱(14),中心圆柱凸轮(24),中心圆柱凸轮(24)上具有棘轮结构和凹槽结构。棘轮结构与EAP驱动器组件中的棘爪配合。还包括两个对称固定于相应侧导柱(15)上的与中心圆柱凸轮(24)的凹槽配合的凸起杆;还包括两个铰接于上盖板(1)和底座(13)之间的折杆机构。本发明利用介电型EAP驱动器通过棘爪棘轮机构带动中心圆柱凸轮单向旋转,中心圆柱凸轮转动时其外表面上的螺旋型凹槽受外力作用会

弹跳机器人弹跳机构的设计与仿真分析.docx
弹跳机器人弹跳机构的设计与仿真分析标题:弹跳机器人弹跳机构的设计与仿真分析摘要:弹跳机器人作为一种新兴的机器人技术,在各个领域具有广泛的应用前景。其中,弹跳机构被视为弹跳机器人的关键部件,其设计和仿真分析的优化对于提高弹跳机器人的性能至关重要。本文结合弹跳机器人的概述和目前的研究进展,探讨了弹跳机构的设计原理和仿真分析方法,并给出了一些实际应用中常见的设计和仿真案例。第一节:弹跳机器人的概述1.1弹跳机器人的定义和分类1.2弹跳机器人的应用领域1.3弹跳机构的重要性与挑战第二节:弹跳机构的设计原理2.1弹

垂直弹跳圣经.docx
如果想飞,你有三个选择:1、买张飞机票2、长出羽毛和翅膀3、提高垂直弹跳力虽然坐在飞机里飞是最彻底的办法,但是价格很昂贵,而且时间太短暂了。长出羽毛和翅膀根本不可能!所以,除非你钱很多,或者你真的相信进化,那么你就只能提高自己的垂直弹跳力了。强大的垂直弹跳力在人类所了解的一些最漂亮最优雅的动作中占据着核心位置——科比布莱恩特的快攻扣篮,关颖珊的三周半跳跃,巴瑞辛尼科夫在芭蕾舞中漂浮一样的空中动作。但是不要搞错了,垂直弹跳力也是一项纯原始力量指标,广泛用于从职业运动员到大学生运动员的体能测试之中。一个运动员