
一种高可靠储能飞轮磁轴承数字控制系统.pdf

一只****签网


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高可靠储能飞轮磁轴承数字控制系统.pdf
本发明提供的一种高可靠储能飞轮磁轴承数字控制系统,是一种能够用来对磁悬浮储能飞轮的电磁轴承进行控制的装置,其主要包括接口电路、DSP系统、磁轴承控制功率模块、磁悬浮储能飞轮系统、传感器电路。DSP系统通过接口电路获取磁轴承转子位移信号、转速信号、磁轴承线圈电流等数据。DSP系统根据磁轴承转子位移信号、磁轴承线圈电流、转速信号,对电磁轴承进行主动控制。本发明实现了磁轴承数字控制器的集成化设计,使得磁悬浮储能飞轮系统控制器集成度大大提高,减小了体积和重量,并降低了控制器的功耗,提高了控制器的可靠性。

一种高可靠的储能飞轮拖动电机控制数字系统.pdf
本发明提供的一种高可靠的储能飞轮拖动电机控制数字系统,是一种能够用来对磁悬浮储能飞轮的驱动电机进行控制的装置,主要包括接口电路、DSP控制中枢、电机驱动功率放大模块、磁悬浮储能飞轮拖动电机本体、传感器电路。DSP控制器通过传感器接口电路获取拖动电机转速信号、电机绕组电流等数据。控制系统根据传感器接收到的电机转子位置、速度信号,以及根据拖动电机绕组线圈电流信号,对电机的运行状态进行调节。本发明实现了磁悬浮储能飞轮系统拖动电机数字控制器的集成化设计,使得磁悬浮储能飞轮拖动电机的控制器的稳定性和集成度大大提高,

一种集成化的高可靠磁悬浮储能飞轮数字控制装置.pdf
一种集成化的高可靠磁悬浮储能飞轮数字控制装置是一种能对磁悬浮储能飞轮系统电机与电磁轴承进行控制的装置,包括接口电路、FPGA系统、磁轴承控制功率模块、电机控制功率模块、磁悬浮储能飞轮系统、传感器电路,FPGA系统通过接口电路获取磁轴承转子位移信号、转速信号、磁轴承线圈电流、电机绕组电流等数据。一方面FPGA系统根据磁轴承转子位移信号、磁轴承线圈电流、转速信号,对电磁轴承的主动控制;另一方面FPGA系统根据转速指令、电机绕组电流、转速信号,对飞轮转速进行控制。实现了磁轴承数字控制器与电机数字控制器的集成化设

一种混合轴承系统的高稳定性储能飞轮系统.pdf
本发明公开了一种混合轴承系统的高稳定性储能飞轮系统,包括飞轮转子,所述飞轮转子位于真空室内,所述飞轮转子的上部由永磁轴承卸载,下部由液体动压轴承支撑,并以永磁轴承和液体动压轴承为中轴线在真空室内旋转、储能;所述真空室内还设有为所述飞轮转子提供消散振动的减震组件。本发明简化了转子的动力学特征,处于最佳模态阻尼比状态的阻尼器对油膜振荡的抑制能力很强。电磁寄生振荡的干扰也被阻尼器直接消除,飞轮转子的系统呈现出了极高的运行稳定性。
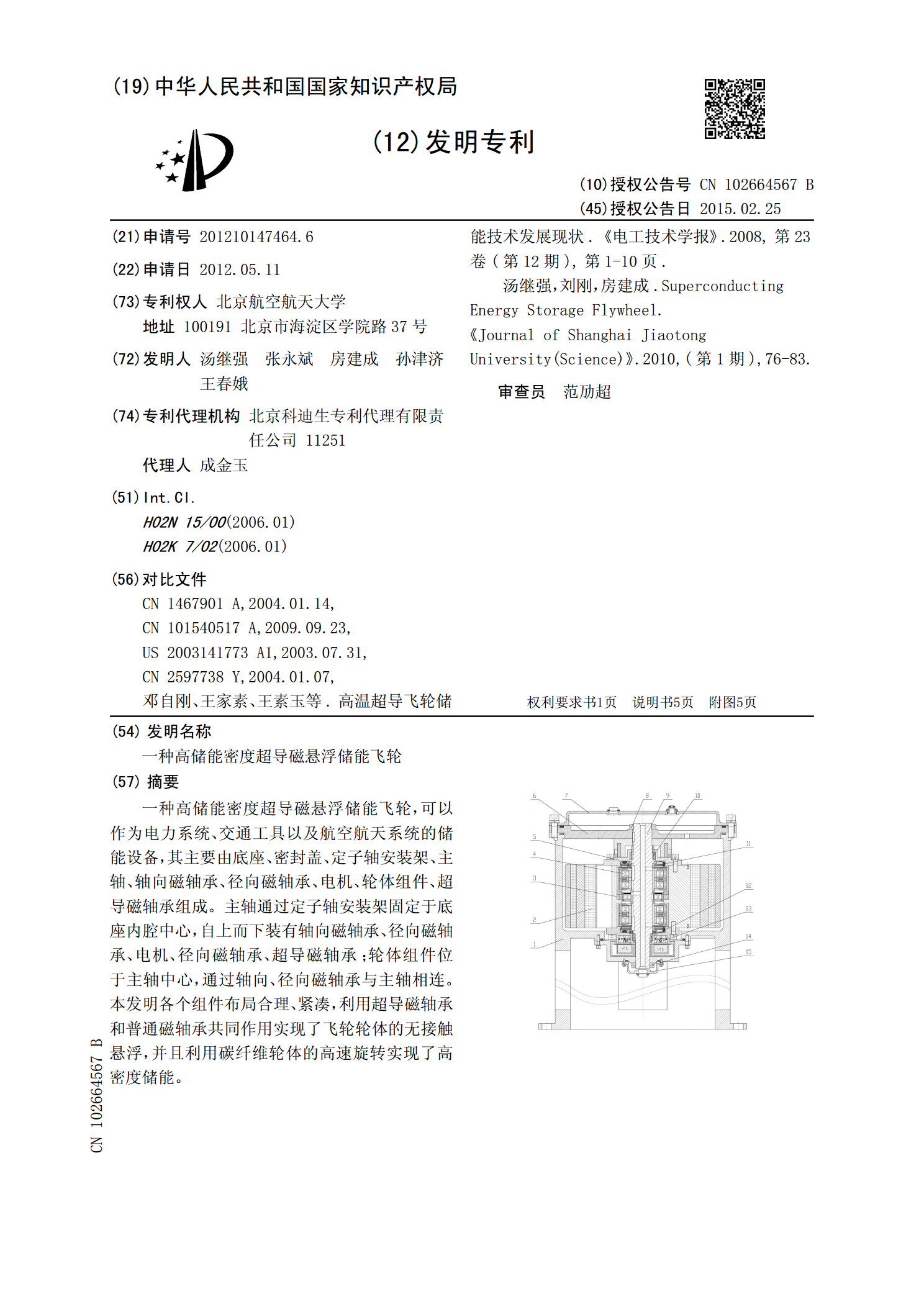
一种高储能密度超导磁悬浮储能飞轮.pdf
一种高储能密度超导磁悬浮储能飞轮,可以作为电力系统、交通工具以及航空航天系统的储能设备,其主要由底座、密封盖、定子轴安装架、主轴、轴向磁轴承、径向磁轴承、电机、轮体组件、超导磁轴承组成。主轴通过定子轴安装架固定于底座内腔中心,自上而下装有轴向磁轴承、径向磁轴承、电机、径向磁轴承、超导磁轴承;轮体组件位于主轴中心,通过轴向、径向磁轴承与主轴相连。本发明各个组件布局合理、紧凑,利用超导磁轴承和普通磁轴承共同作用实现了飞轮轮体的无接触悬浮,并且利用碳纤维轮体的高速旋转实现了高密度储能。