
基于头势的智能轮椅的人机交互系统及方法.pdf

俊英****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于头势的智能轮椅的人机交互系统及方法.pdf
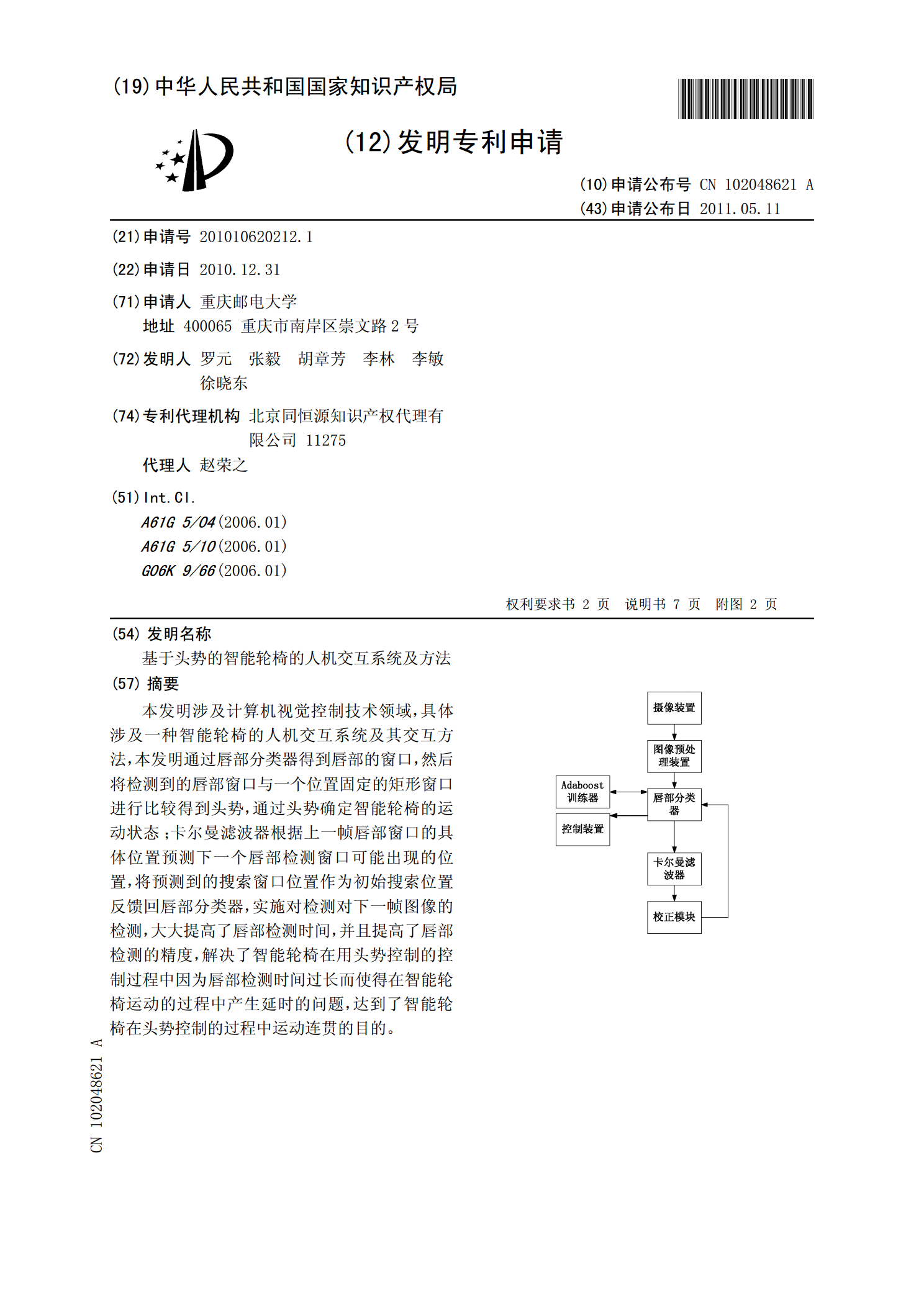
本发明涉及计算机视觉控制技术领域,具体涉及一种智能轮椅的人机交互系统及其交互方法,本发明通过唇部分类器得到唇部的窗口,然后将检测到的唇部窗口与一个位置固定的矩形窗口进行比较得到头势,通过头势确定智能轮椅的运动状态;卡尔曼滤波器根据上一帧唇部窗口的具体位置预测下一个唇部检测窗口可能出现的位置,将预测到的搜索窗口位置作为初始搜索位置反馈回唇部分类器,实施对检测对下一帧图像的检测,大大提高了唇部检测时间,并且提高了唇部检测的精度,解决了智能轮椅在用头势控制的控制过程中因为唇部检测时间过长而使得在智能轮椅运动的过

基于头势的智能轮椅无障碍人机交互.docx
基于头势的智能轮椅无障碍人机交互基于头势的智能轮椅无障碍人机交互摘要:随着无障碍技术的不断发展和智能化设备的广泛应用,智能轮椅作为辅助工具在提升无障碍人机交互中的重要作用越来越被重视。本论文将介绍基于头势的智能轮椅无障碍人机交互的实现原理、技术挑战以及应用场景,并对未来发展进行展望。关键词:头势识别、智能轮椅、无障碍、人机交互、技术挑战1.引言无障碍人机交互是指为了满足残疾人群体的需求,在不同的环境中使其能够自由地使用智能设备,并参与社交和工作活动。对于行动不便的人来说,交通工具的使用无疑是其中的关键问题

基于头势的智能轮椅无障碍人机交互的中期报告.docx
基于头势的智能轮椅无障碍人机交互的中期报告一、项目简介:本项目旨在研发一种基于头势的智能轮椅无障碍人机交互系统,通过利用人的头部姿势控制轮椅运动,实现残疾人士在日常生活中的无障碍出行。二、项目进展:目前,我们已经完成了下列工作:1.研究和选择了可用于头势识别的传感器和算法,预先测试并筛选出性能最佳的组合;2.设计并制作了头戴式传感器装置,并进行了初步的测试和验证,取得了较好的效果;3.建立了基于传感器数据的头势控制模型,并与轮椅运动控制系统进行了集成测试,初步验证了控制系统的可行性和稳定性;4.进行了用户

基于头势的智能轮椅无障碍人机交互的任务书.docx
基于头势的智能轮椅无障碍人机交互的任务书任务书一、背景与目的在现代社会,无障碍交通一直是一个重要的议题。随着智能科技的发展,智能轮椅成为了提供无障碍交通解决方案的重要手段。然而,传统的智能轮椅仍然存在许多限制和挑战。传统的遥控方式限制了用户与智能轮椅之间的交互方式,使得操作手法受到限制,体验度不佳。因此,本次任务的目的是基于头势的智能轮椅无障碍人机交互系统的设计与开发,通过头部动作的捕捉和识别,实现用户与智能轮椅之间更为自然、便利的交互方式,提升用户的使用体验和操作自由度。二、任务内容本项目的任务内容包括
基于眼部动作识别的智能轮椅人机交互控制系统及方法.pdf
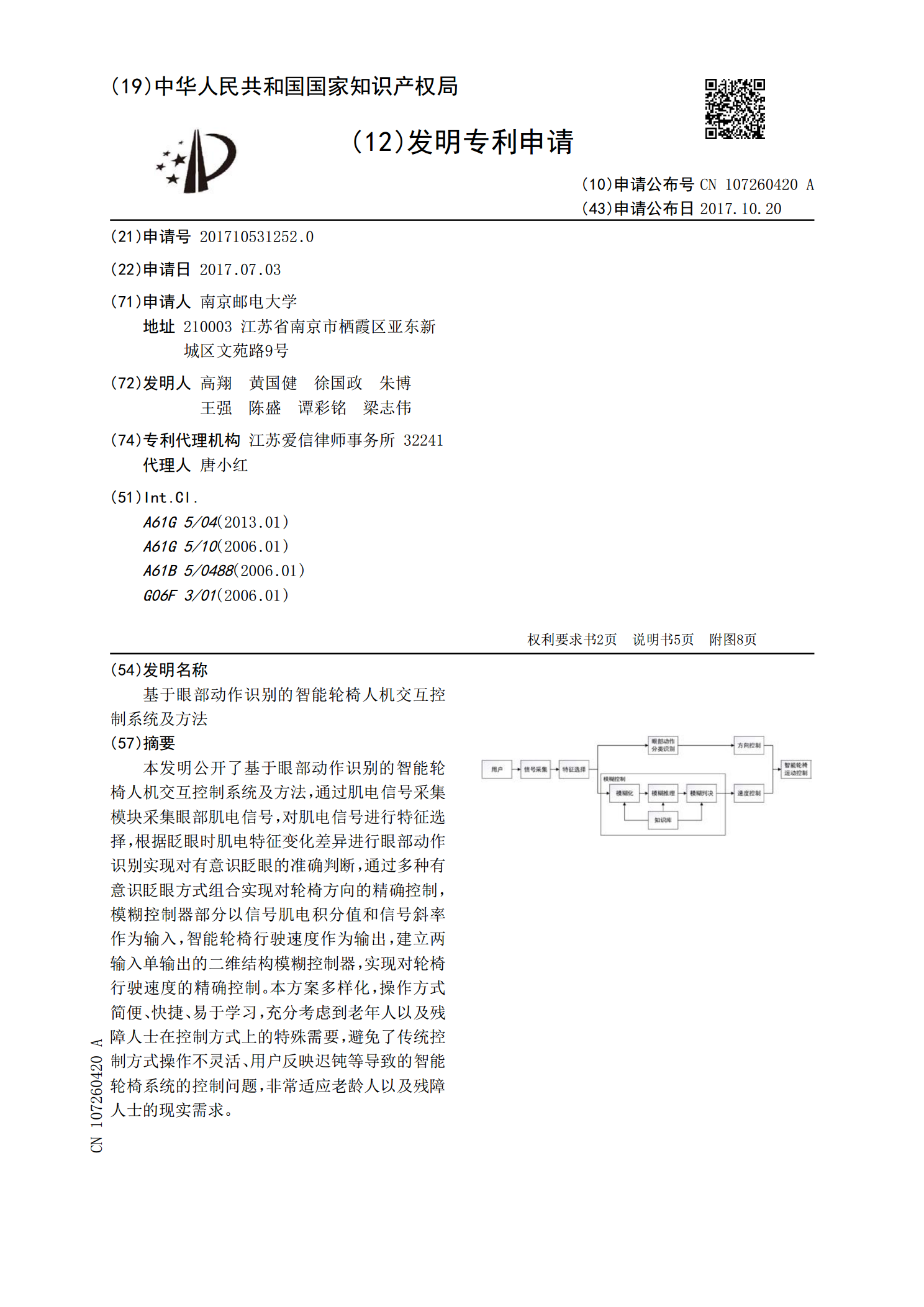
本发明公开了基于眼部动作识别的智能轮椅人机交互控制系统及方法,通过肌电信号采集模块采集眼部肌电信号,对肌电信号进行特征选择,根据眨眼时肌电特征变化差异进行眼部动作识别实现对有意识眨眼的准确判断,通过多种有意识眨眼方式组合实现对轮椅方向的精确控制,模糊控制器部分以信号肌电积分值和信号斜率作为输入,智能轮椅行驶速度作为输出,建立两输入单输出的二维结构模糊控制器,实现对轮椅行驶速度的精确控制。本方案多样化,操作方式简便、快捷、易于学习,充分考虑到老年人以及残障人士在控制方式上的特殊需要,避免了传统控制方式操作不