
一种基于协方差匹配的核跟踪方法.pdf

波峻****99


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于协方差匹配的核跟踪方法.pdf
本发明涉及一种基于协方差匹配的核跟踪方法,属于视觉跟踪技术领域。基于协方差匹配的核跟踪方法,利用核函数控制图像中不同像素点对整体产生的影响,通过极小化目标函数,迭代产生每一帧图像目标区域的质心。在第一帧,手动或半自动初始化包围目标的曲线,为曲线包围的区域建立协方差矩阵作为目标轮廓的模板。从下一帧图像开始,由上一帧的结果,计算出中心点坐标,根据建立的能量泛函推导出的梯度下降流,迭代更新得到新的目标区域中心点坐标。检测迭代是否终止。本发明所提基于协方差匹配的核跟踪方法,同样以协方差作为区域描绘子,融合多种特征

一种基于协方差匹配的主动轮廓跟踪方法.pdf
本发明涉及一种基于协方差匹配的主动轮廓跟踪方法,属于视觉跟踪技术领域。一种基于协方差匹配的主动轮廓跟踪方法,利用非欧氏几何建模图像区域能量项。在第一帧,手动初始化包围目标的曲线,为曲线包围的区域建立协方差矩阵作为目标轮廓的模板;在获得了目标的轮廓之后,记录模板的水平集函数值为先验形状做准备并计算模板的符号化距离函数;从下一帧图像开始,由上一帧的结果,根据建立的能量泛函推导出梯度下降流,然后更新水平集函数;检测迭代是否终止。本发明的跟踪结果更加准确,同时以协方差矩阵作为区域描绘子,综合考虑了图像序列中的各种

基于协方差匹配的多天线频谱感知方法.pdf
基于协方差匹配的多天线频谱感知方案具体包括半盲检测方法和全盲检测方法。半盲检测方法通过比较接收信号取样协方差矩阵与已知的噪声协方差矩阵(这里表示噪声方差,M表示接收天线数目,IM表示M×M单位矩阵),构造了新的检测量而全盲检测方法利用主信号没有出现时,其归一化的取样协方差矩阵应该近似等于对角阵的事实,构造了另一个新的检测量这两种方法利用相关性作为构造判决量的基础,均无需预先知道主用户信号和传输信道的统计特性;尤其对于基于协方差匹配的全盲检测算法,在噪声方差未知的情况下也能有效地实施频谱感知。
基于稠密轨迹核协方差描述子的行为识别方法.pdf
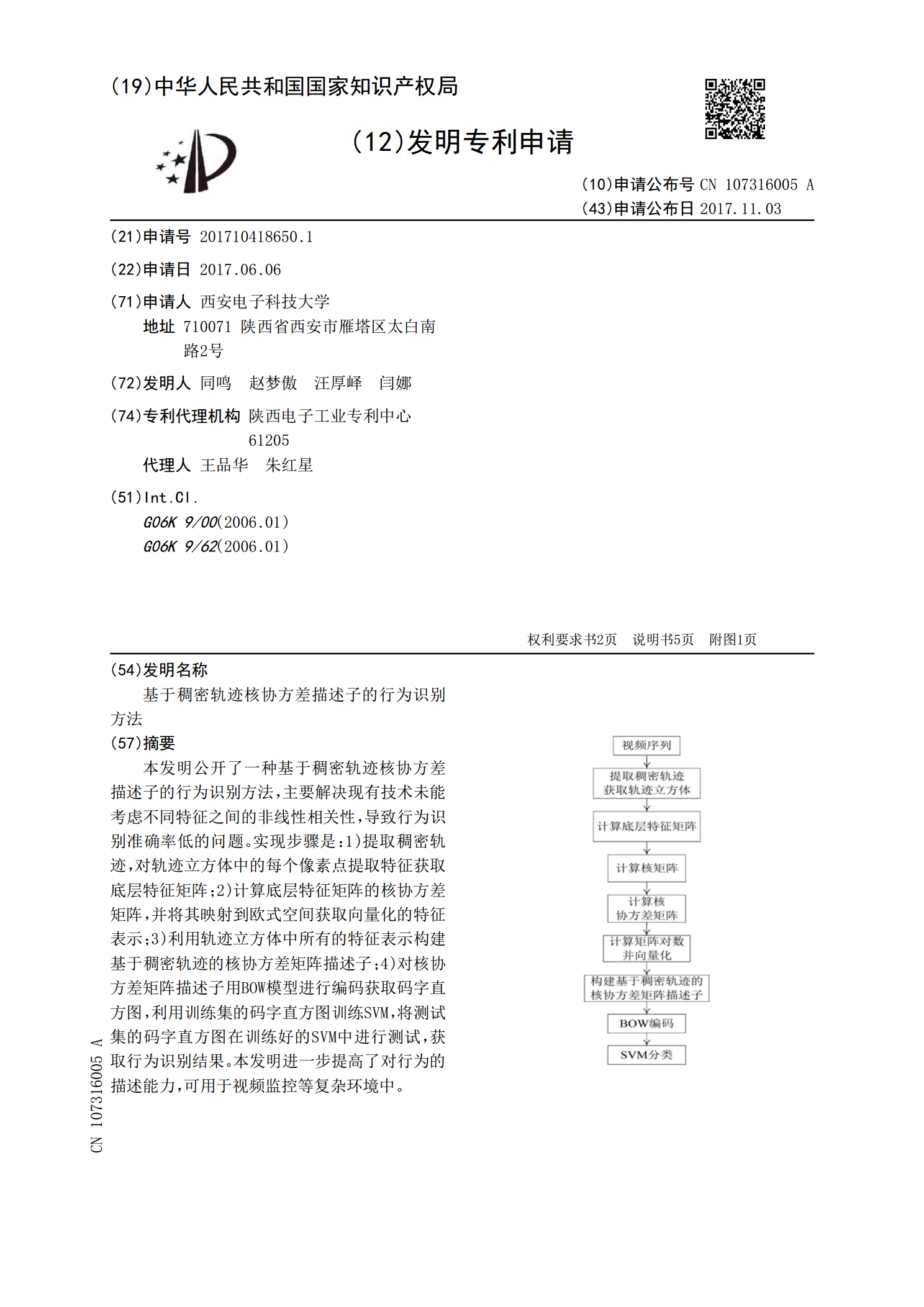
本发明公开了一种基于稠密轨迹核协方差描述子的行为识别方法,主要解决现有技术未能考虑不同特征之间的非线性相关性,导致行为识别准确率低的问题。实现步骤是:1)提取稠密轨迹,对轨迹立方体中的每个像素点提取特征获取底层特征矩阵;2)计算底层特征矩阵的核协方差矩阵,并将其映射到欧式空间获取向量化的特征表示;3)利用轨迹立方体中所有的特征表示构建基于稠密轨迹的核协方差矩阵描述子;4)对核协方差矩阵描述子用BOW模型进行编码获取码字直方图,利用训练集的码字直方图训练SVM,将测试集的码字直方图在训练好的SVM中进行测试

一种基于孪生网络的跟踪模型的特征匹配方法.pdf
本发明公开了一种基于孪生网络的跟踪模型的特征匹配方法,先将模板帧和检测帧送入网络进行卷积特征提取生成对应的模板特征图和检测特征图,得到匹配特征图,然后对区域建议网络优化,通过增加卷积层数量和通道数以及引入分组卷积来增强匹配,对模板特征图和检测特征图进行特征匹配,得到的匹配特征图进行必要分类和回归分支的维度映射,最终输出两分支的响应图;本发明方法具有一定的适应性与可扩展性,可应用于基于孪生网络结构的跟踪算法网络模型,在不牺牲其速度性能情况下增强其跟踪精度。