
定时部件素材.ppt

YY****。。

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共38页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
定时部件素材.ppt
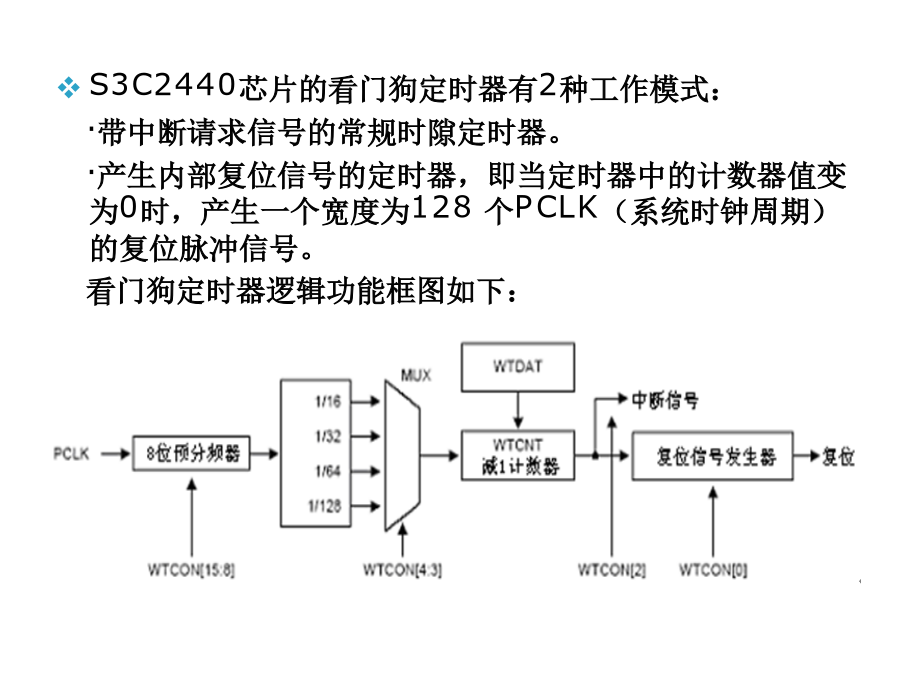
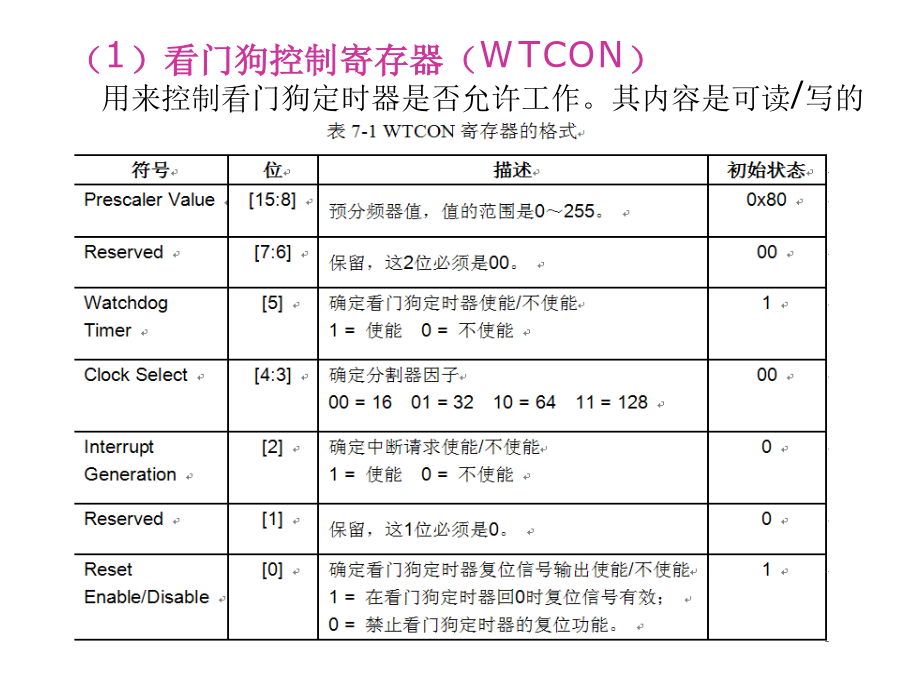
17定时部件7.2看门狗定时器S3C2440芯片的看门狗定时器有2种工作模式:·带中断请求信号的常规时隙定时器。·产生内部复位信号的定时器,即当定时器中的计数器值变为0时,产生一个宽度为128个PCLK(系统时钟周期)的复位脉冲信号。看门狗定时器逻辑功能框图如下:S3C2440芯片的看门狗定时器逻辑中含有3个控制其操作的专用寄存器:看门狗控制寄存器(WTCON)计数常数寄存器(WTDAT)看门狗计数器寄存器(WTCNT)(1)看门狗控制寄存器(WTCON)用来控制看门狗定时器是否允许工作。其内容是可读/写
2010-第7章_嵌入式定时部件.ppt
90%90%90%90%90%=?第7章定时部件7.1定时部件原理定时原理定时原理计数原理7.2看门狗定时器7.2看门狗定时器7.2看门狗定时器7.2看门狗定时器7.4Timer部件7.4Timer部件7.2Timer定时器定时器内部结构图7.4Timer定时器7.4Timer定时器操作7.4Timer定时器7.4Timer定时器操作7.4Timer定时器操作方法1:关闭自动加载位。然后,TOUT的电平变为高,定时器在TCNTn递减计数到0时停止。(推荐使用)方法2:通过将定时器的启动/停止位清0来
用于车辆的可定时提醒零部件放置装置.pdf
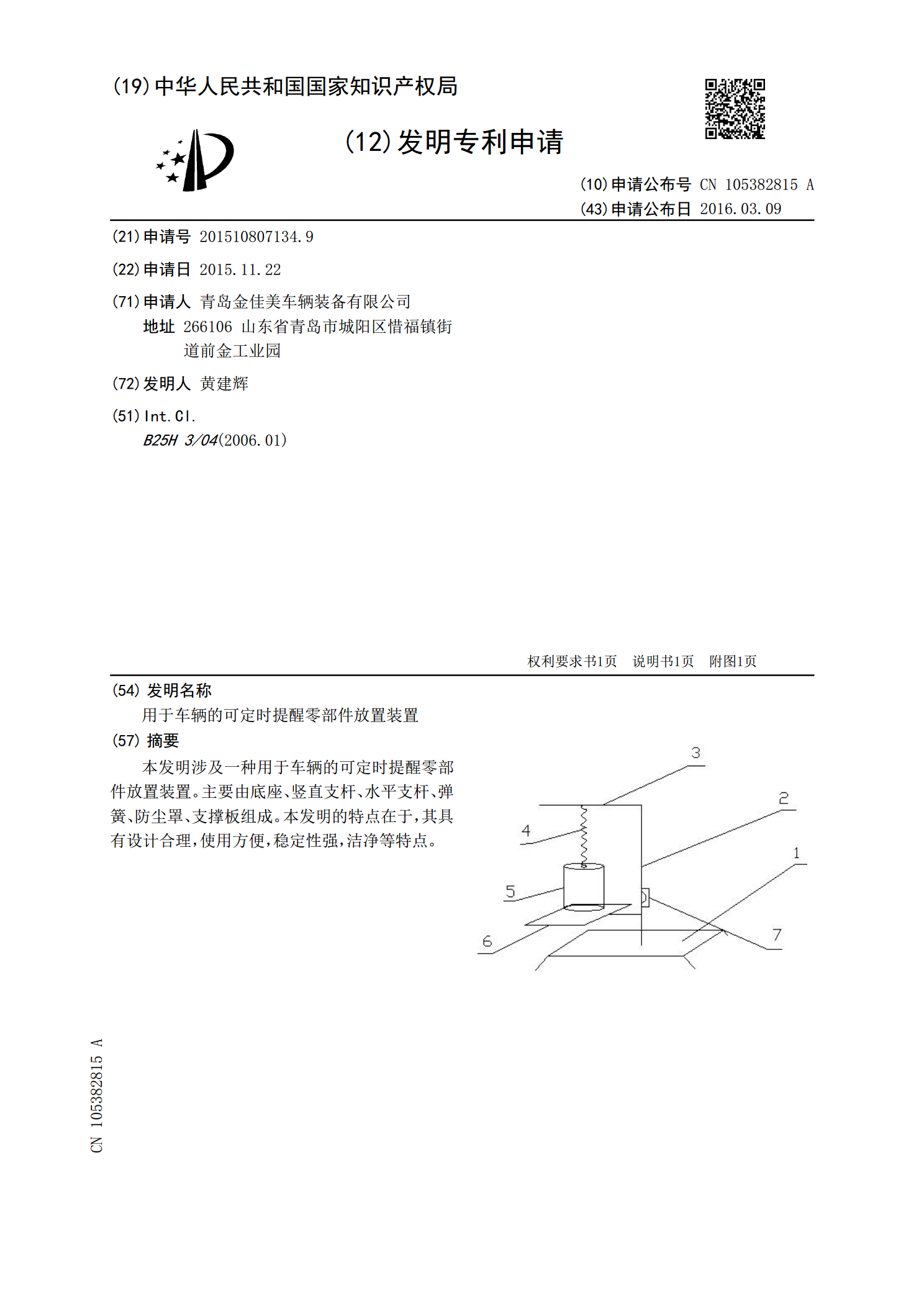
本发明涉及一种用于车辆的可定时提醒零部件放置装置。主要由底座、竖直支杆、水平支杆、弹簧、防尘罩、支撑板组成。本发明的特点在于,其具有设计合理,使用方便,稳定性强,洁净等特点。

2011高考语文 基础知识定时训练四十套复习素材.doc
2011届高三语文基础知识训练(一)1、下列词语中加点的字读音全都正确的一组是()A.似(shì)的重(zhòng)听无声无臭(xiù)同仇敌忾(kài)B.怃(wǔ)然舂(chōng)米自怨自艾(yì)锐不可当(dǎng)C.埋(mán)怨气氛(fèn)胼手胝(zhī)足敛声屏(bǐng)气D.悲恸(tòng)沮丧(sāng)咄咄(duō)怪事间(jiān)不容发2、下面语段中加点的熟

小学数学 数学神探 用定时装置逃脱 素材.doc
用定时装置逃脱被监禁在敌方地下指挥部的秘密谍报员009号,用藏在鞋跟处的锉刀锉断了铁窗的栏杆。地下室里有装着汽油的汽油桶。为了泄愤,脱号决定用汽油焚烧地下指挥部,然后选脱。但是,在汽油起火前,他需要逃脱的时间,哪怕是几分钟也行。碰巧,没有定时装置,也没有可用于导火索的长绳。随身物品都被没收了,口袋中只剩有香烟和纸火柴。突然,他计上心来,把汽油洒到地上,用烟和火柴盒,制做了定时装置。于是,他顺利逃脱。大约十分钟后,汽油起火——顷刻之中地下指挥部陷于一片火海。答案:简易定时装置制作将点燃的香烟夹在火柴的纸板之