
混合动力车辆的电机控制装置以及驱动装置.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
混合动力车辆的电机控制装置以及驱动装置.pdf
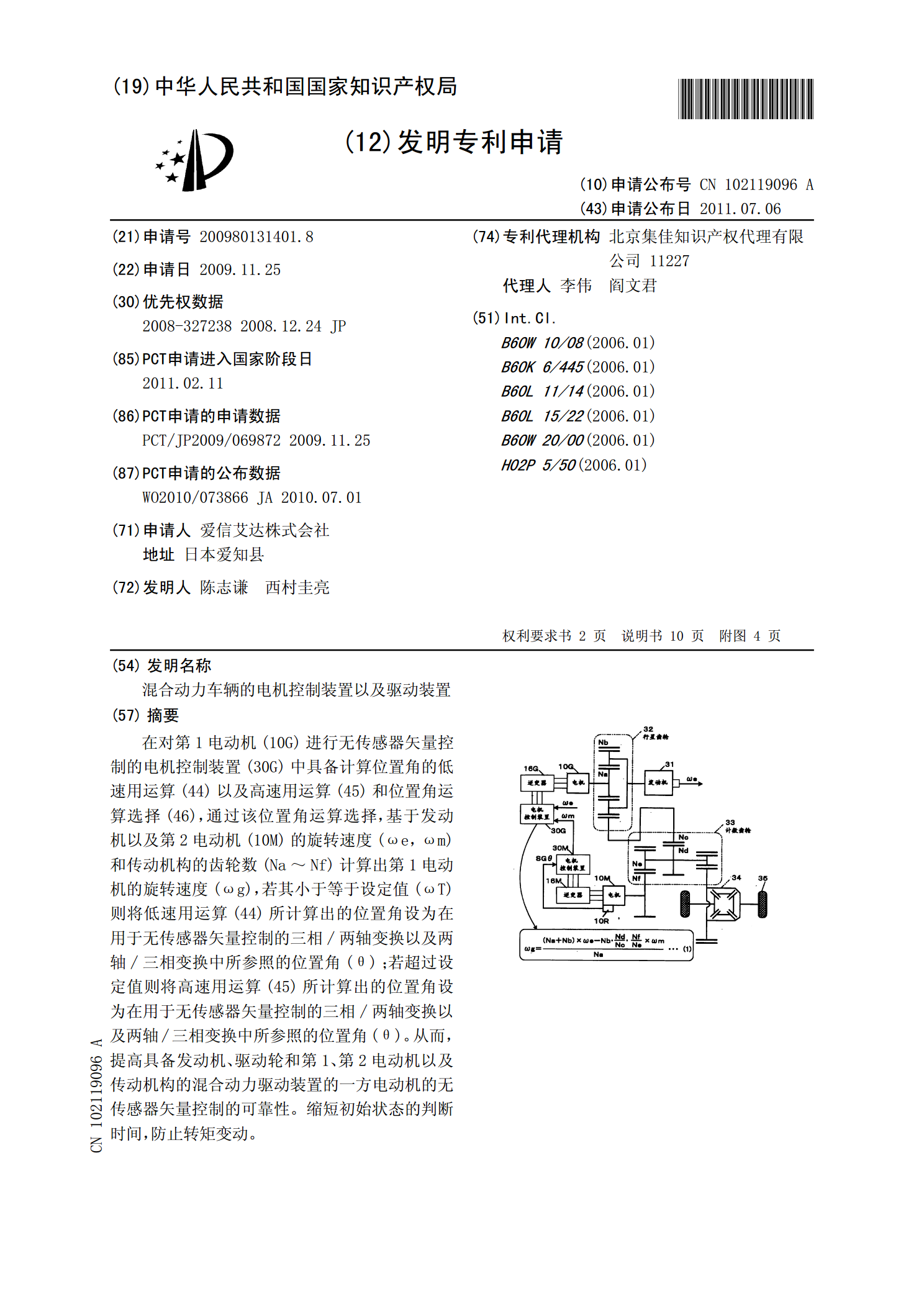
在对第1电动机(10G)进行无传感器矢量控制的电机控制装置(30G)中具备计算位置角的低速用运算(44)以及高速用运算(45)和位置角运算选择(46),通过该位置角运算选择,基于发动机以及第2电动机(10M)的旋转速度(ωe,ωm)和传动机构的齿轮数(Na~Nf)计算出第1电动机的旋转速度(ωg),若其小于等于设定值(ωT)则将低速用运算(44)所计算出的位置角设为在用于无传感器矢量控制的三相/两轴变换以及两轴/三相变换中所参照的位置角(θ);若超过设定值则将高速用运算(45)所计算出的位置角设为在用于无
混合动力车辆用驱动装置的控制装置.pdf
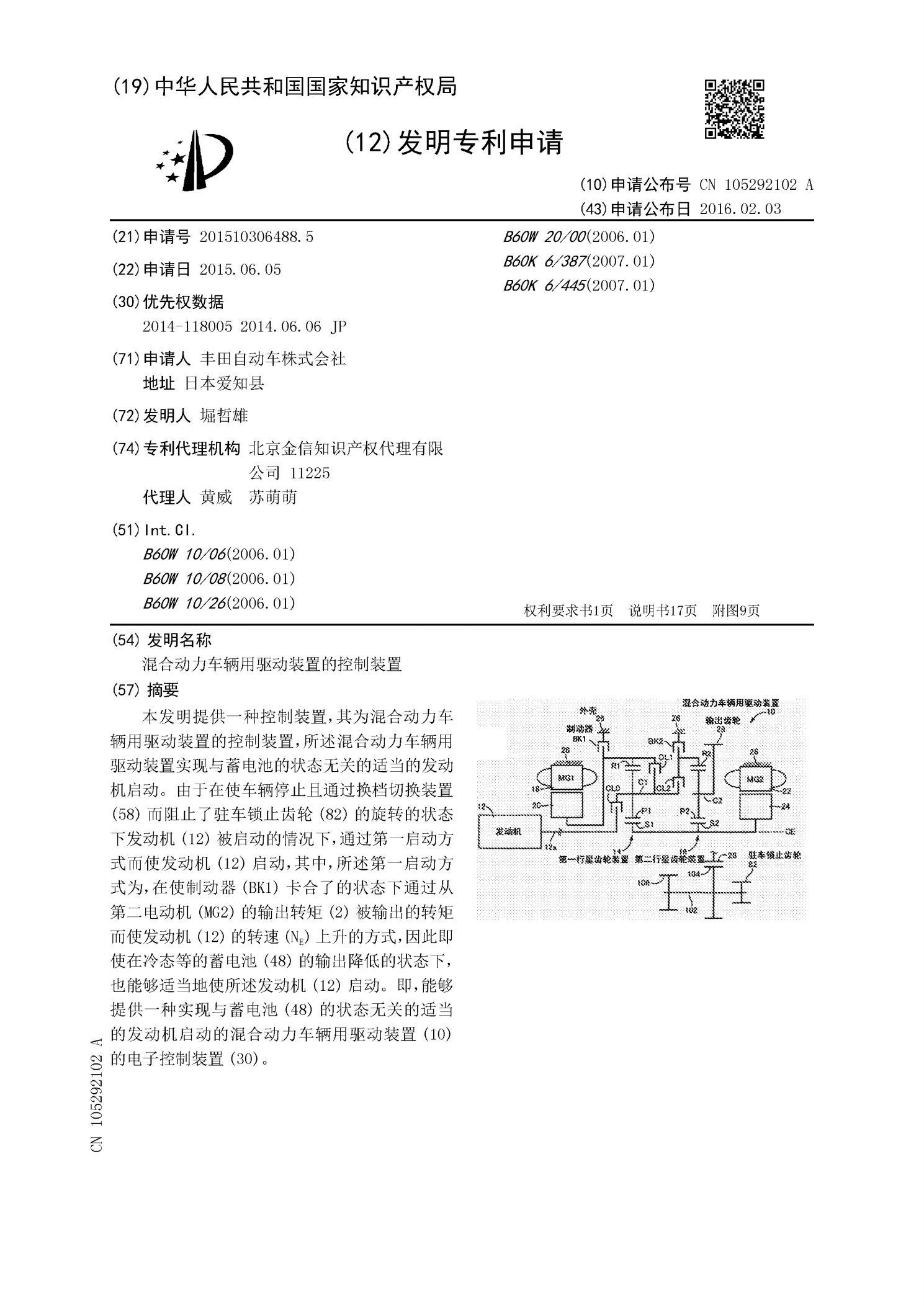
本发明提供一种控制装置,其为混合动力车辆用驱动装置的控制装置,所述混合动力车辆用驱动装置实现与蓄电池的状态无关的适当的发动机启动。由于在使车辆停止且通过换档切换装置(58)而阻止了驻车锁止齿轮(82)的旋转的状态下发动机(12)被启动的情况下,通过第一启动方式而使发动机(12)启动,其中,所述第一启动方式为,在使制动器(BK1)卡合了的状态下通过从第二电动机(MG2)的输出转矩(2)被输出的转矩而使发动机(12)的转速(NE)上升的方式,因此即使在冷态等的蓄电池(48)的输出降低的状态下,也能够适当地使所

混合动力车辆用驱动装置的控制装置.pdf
本发明提供一种对因驻车锁止的解除造成的装置的耐久性的下降进行抑制的混合动力车辆用驱动装置的控制装置。由于其为在由换档切换装置(58)实施的驻车锁止齿轮(82)的旋转的阻止被解除时,在离合器(CL2)被卡合了的状态下解除驻车锁止齿轮(82)的旋转的阻止的装置,因此能够通过使因驻车锁止的解除而产生的冲击转矩向第一行星齿轮装置(14)、发动机(12)、以及第一电动机(MG1)等传递,从而缓和向第二电动机(MG2)传递的冲击转矩。即,能够提供对因驻车锁止的解除造成的耐久性下降进行抑制的驱动装置(10)的电子控制装

混合动力车辆用驱动装置的控制装置.pdf
本发明提供一种对后退行驶时的发动机的反转进行抑制的混合动力车辆用驱动装置的控制装置。所述混合动力车辆用驱动装置的控制装置具备对离合器(CL1)的释放进行判断的离合器释放判断部(72)、和对制动器(BK1)的释放进行判断的制动器释放判断部(74),由于在具有使输出齿轮28反转的要求的情况下,在通过离合器释放判断部(72)而判断出离合器(CL1)的释放且通过制动器释放判断部(74)而判断出制动器(BK1)的释放之后,从第二电动机(MG2)产生使输出齿轮(28)反转的转矩,因此,能够抑制发动机(12)以及第二电
混合动力车辆用驱动装置的控制装置.pdf
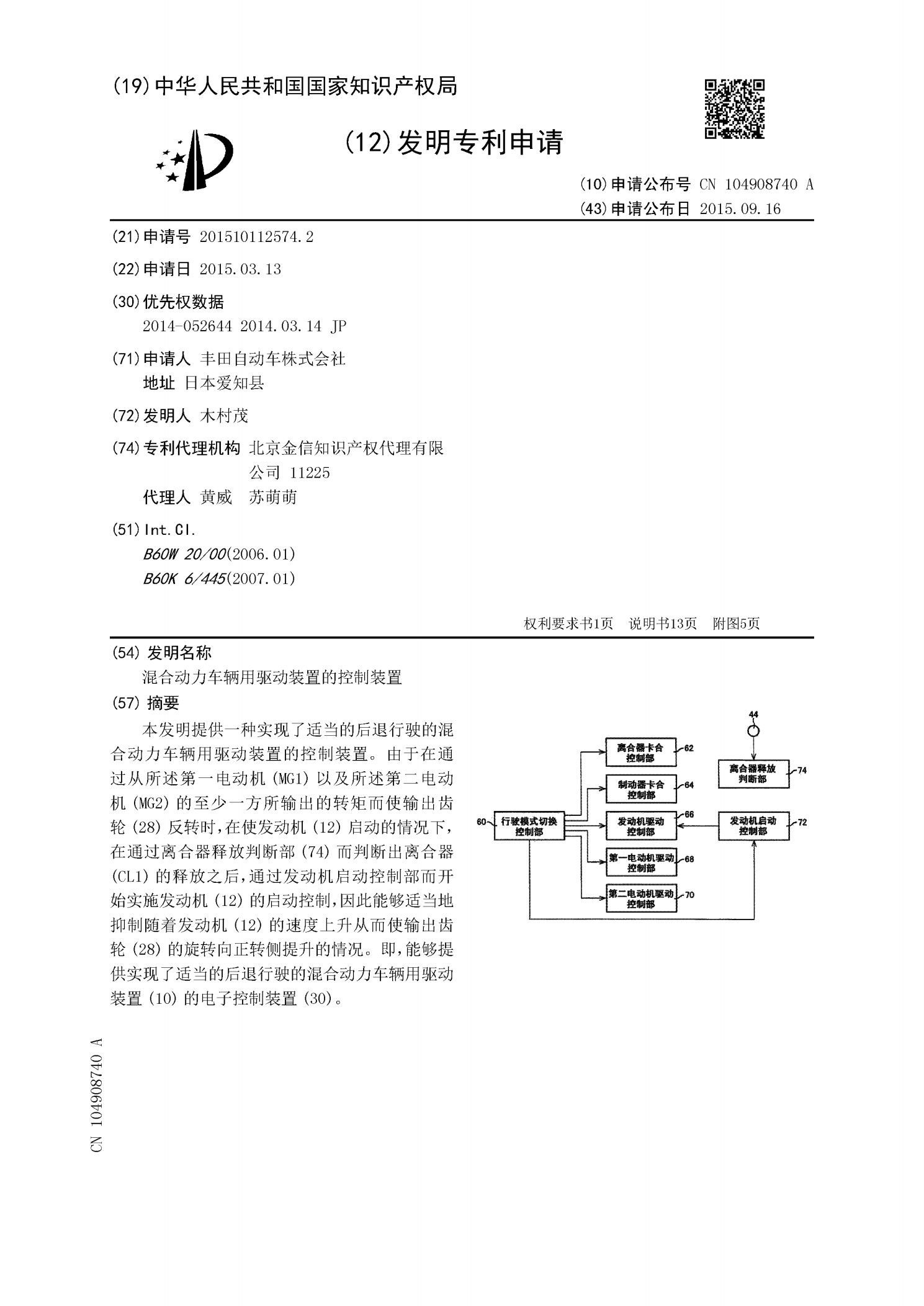
本发明提供一种实现了适当的后退行驶的混合动力车辆用驱动装置的控制装置。由于在通过从所述第一电动机(MG1)以及所述第二电动机(MG2)的至少一方所输出的转矩而使输出齿轮(28)反转时,在使发动机(12)启动的情况下,在通过离合器释放判断部(74)而判断出离合器(CL1)的释放之后,通过发动机启动控制部而开始实施发动机(12)的启动控制,因此能够适当地抑制随着发动机(12)的速度上升从而使输出齿轮(28)的旋转向正转侧提升的情况。即,能够提供实现了适当的后退行驶的混合动力车辆用驱动装置(10)的电子控制装置