
一种基于气压砂轮的机器人光整加工系统.pdf

一只****懿呀


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于气压砂轮的机器人光整加工系统.pdf
一种基于气压砂轮的机器人光整加工系统,包括气压砂轮光整工具,所述气压砂轮光整工具安装在工作台上方,并与所述工作台上的加工工件接触;所述气压砂轮光整工具连接在控制其移动和旋转的机器人上;所述机器人与控制其运动的机器人控制柜连接,所述机器人控制柜上连接有自动控制机器人运动的计算机控制与处理模块和手动控制机器人运动的示教编程器,所述工作台与控制其转数的所述计算机控制与处理模块连接;所述气压砂轮光整工具包括第一模块,所述第一模块包括橡胶气囊和粘合在所述橡胶气囊上的磨料,所述橡胶气囊安装在气囊保持架上;所述气囊保持
一种基于柔性可控气压砂轮的光整加工系统.pdf
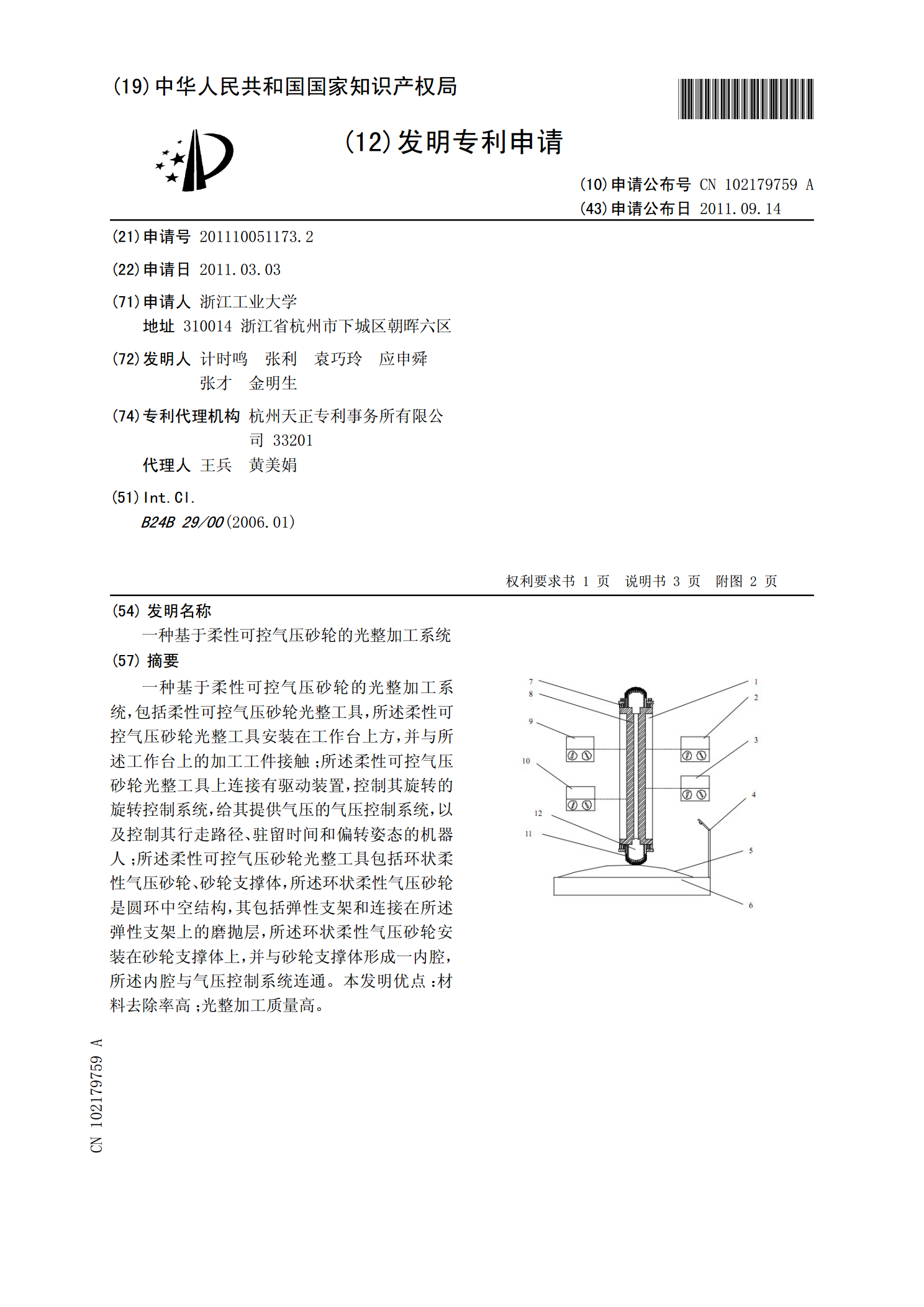
一种基于柔性可控气压砂轮的光整加工系统,包括柔性可控气压砂轮光整工具,所述柔性可控气压砂轮光整工具安装在工作台上方,并与所述工作台上的加工工件接触;所述柔性可控气压砂轮光整工具上连接有驱动装置,控制其旋转的旋转控制系统,给其提供气压的气压控制系统,以及控制其行走路径、驻留时间和偏转姿态的机器人;所述柔性可控气压砂轮光整工具包括环状柔性气压砂轮、砂轮支撑体,所述环状柔性气压砂轮是圆环中空结构,其包括弹性支架和连接在所述弹性支架上的磨抛层,所述环状柔性气压砂轮安装在砂轮支撑体上,并与砂轮支撑体形成一内腔,所述

气压砂轮光整加工振动稳定性研究.pptx
添加副标题目录PART01PART02气压砂轮光整加工技术概述研究背景与现状研究意义与目的PART03研究内容与实验设计实验材料与设备研究方法与实验过程PART04实验结果概述实验结果分析结果对比与讨论PART05研究结论研究成果与创新点研究不足与展望PART06致谢参考文献感谢您的观看

气压砂轮光整加工材料去除控制方法研究.pptx
汇报人:目录PARTONEPARTTWO气压砂轮光整加工技术概述材料去除控制方法的重要性研究目的和意义PARTTHREE气压砂轮光整加工原理材料去除机制材料去除过程的控制因素PARTFOUR材料去除控制方法分类实验设计与方法材料去除控制方法的优化PARTFIVE材料去除实验结果结果分析与讨论材料去除控制方法的性能评估PARTSIX研究结论研究成果的应用前景未来研究方向与展望THANKYOU

软固结磨粒气压砂轮光整加工工艺研究.docx
软固结磨粒气压砂轮光整加工工艺研究在现代制造业中,磨削技术不仅是一项重要的加工工艺,同时也是提升精度和质量的关键因素。软固结磨粒气压砂轮光整加工工艺是一种高精度磨削技术,它能够在高速旋转下使砂轮表面轨迹平稳,轮廓整齐,获得高质量的磨削表面。本文将探讨软固结磨粒气压砂轮光整加工工艺的原理和实现方法,研究其优点和局限性,并探索其未来的发展方向。一、原理软固结磨粒气压砂轮光整加工工艺利用气压的作用,将砂轮与磨削件间隙中充入气体,在气流的作用下使砂轮自由旋转。随着气压不断升高,砂轮与磨削件之间的间隙逐渐缩小,在合