
变位齿轮轮系概要.ppt

YY****。。

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
变位齿轮轮系概要.ppt
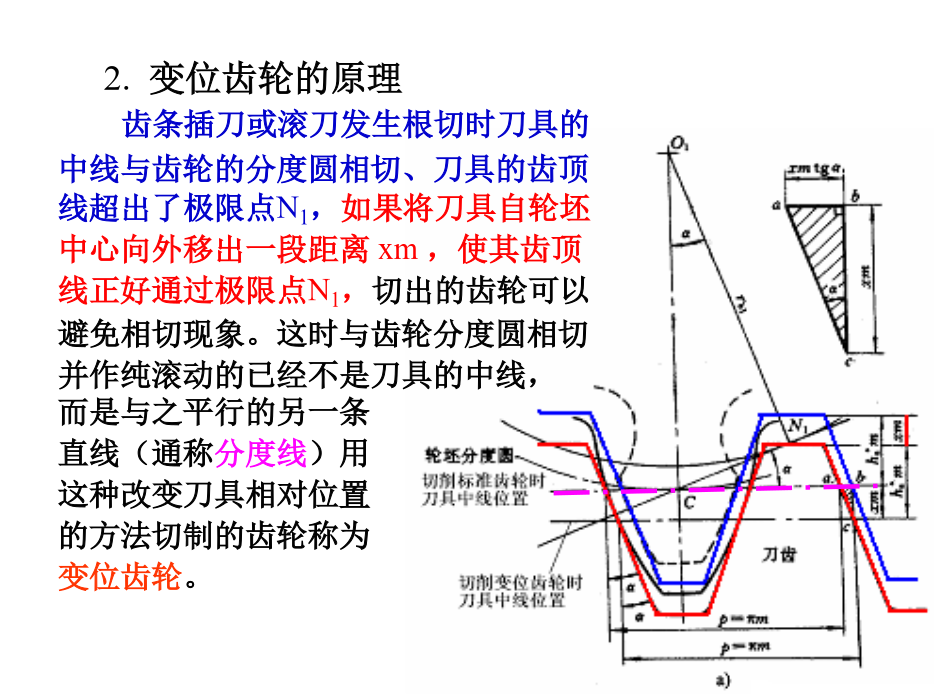
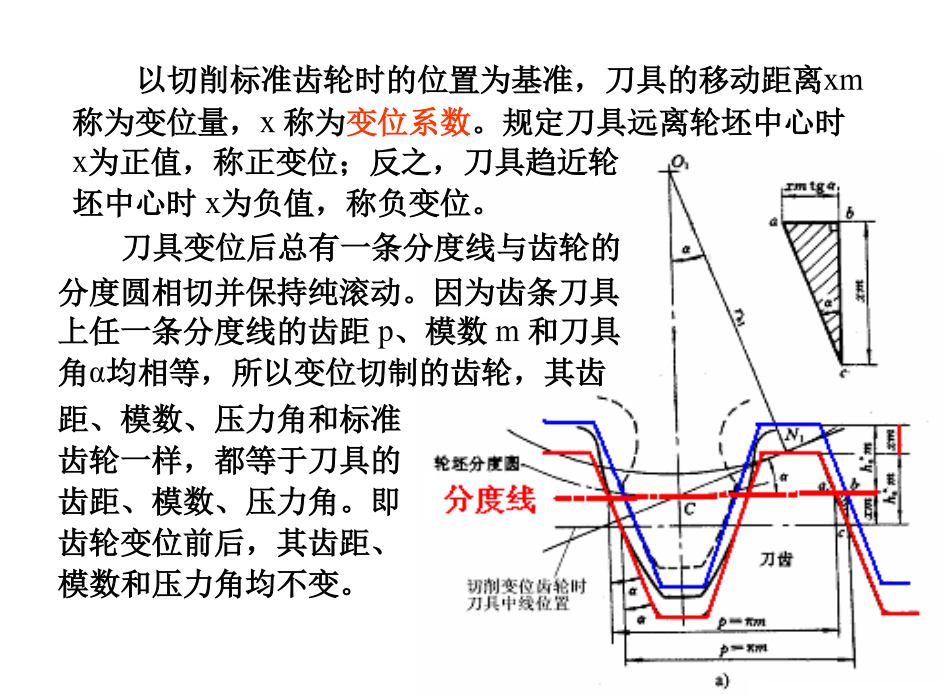
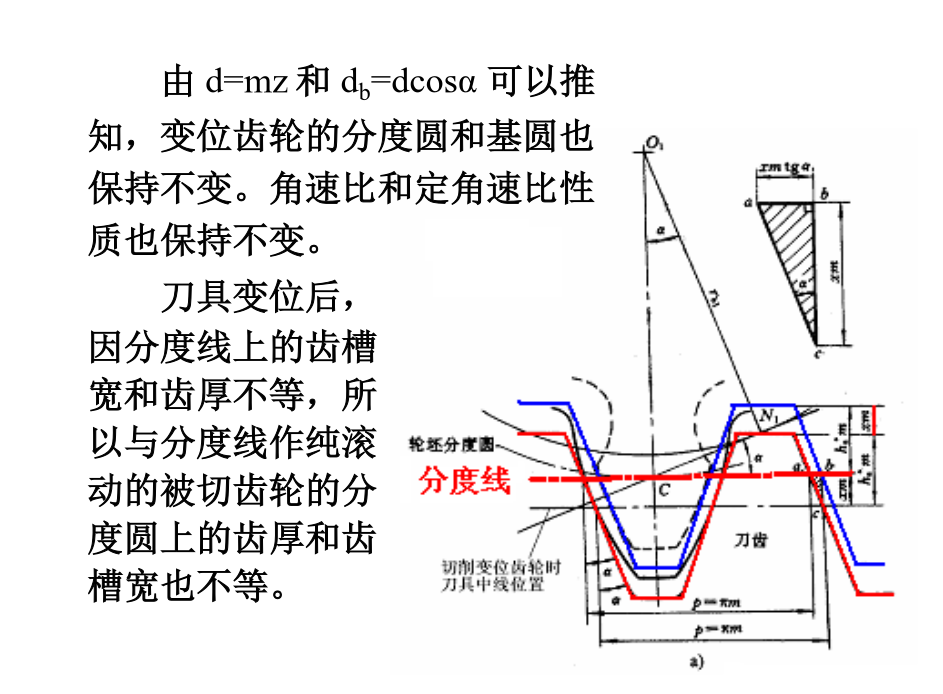
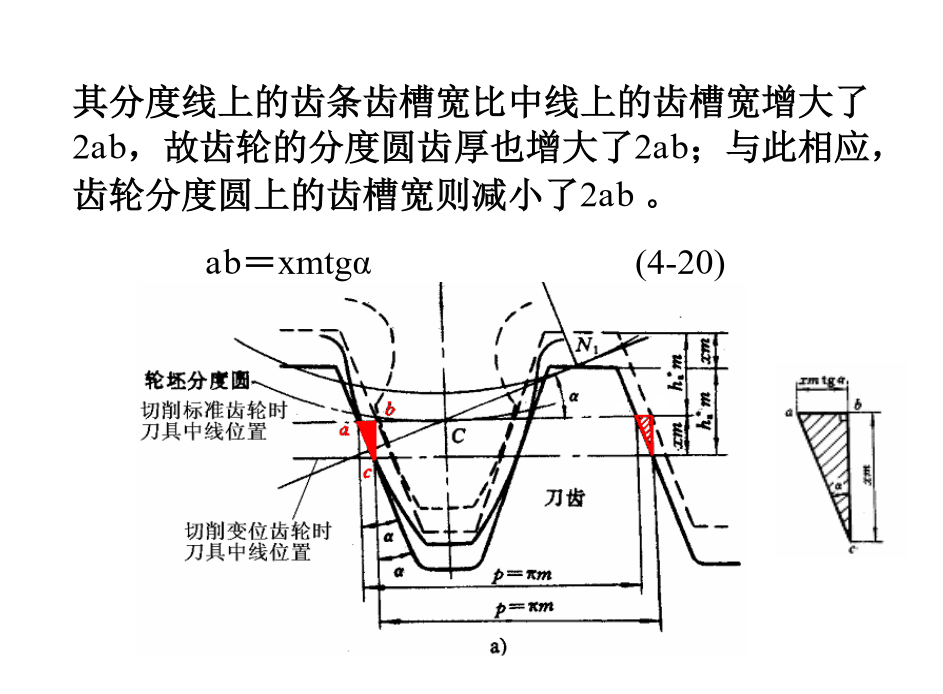
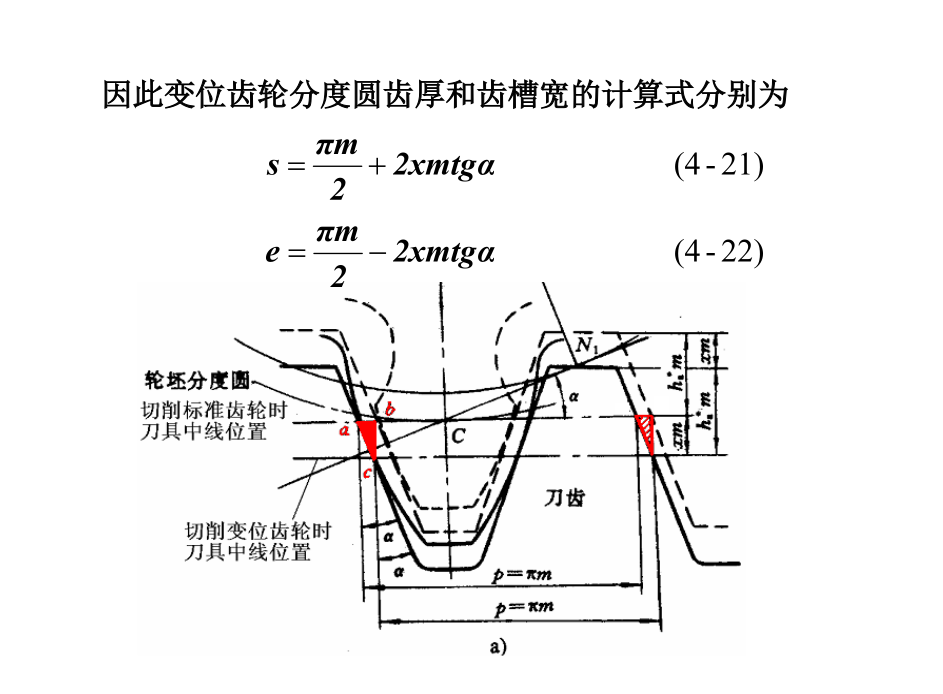
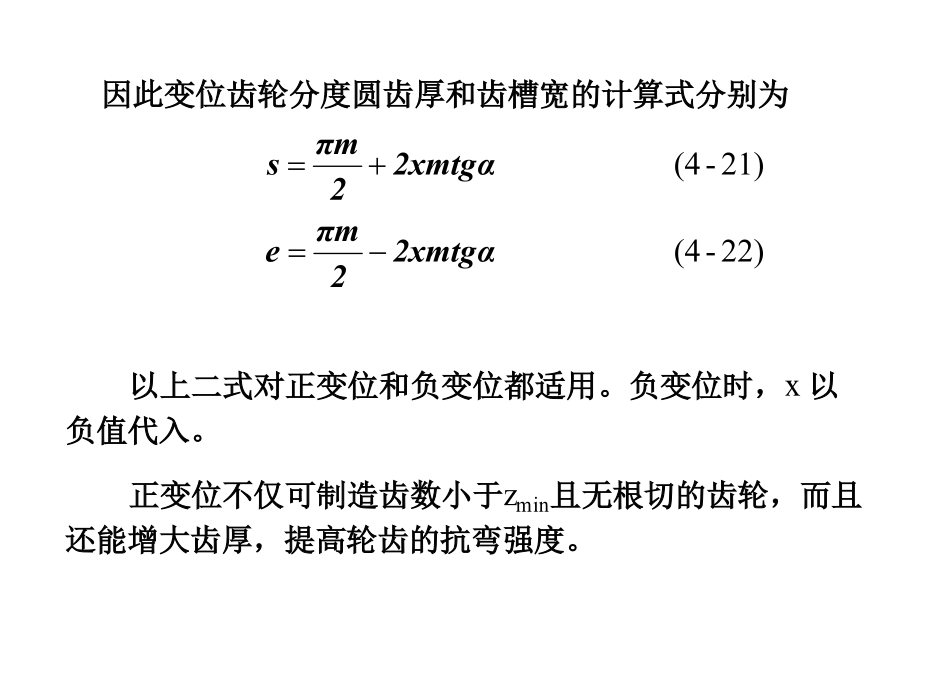
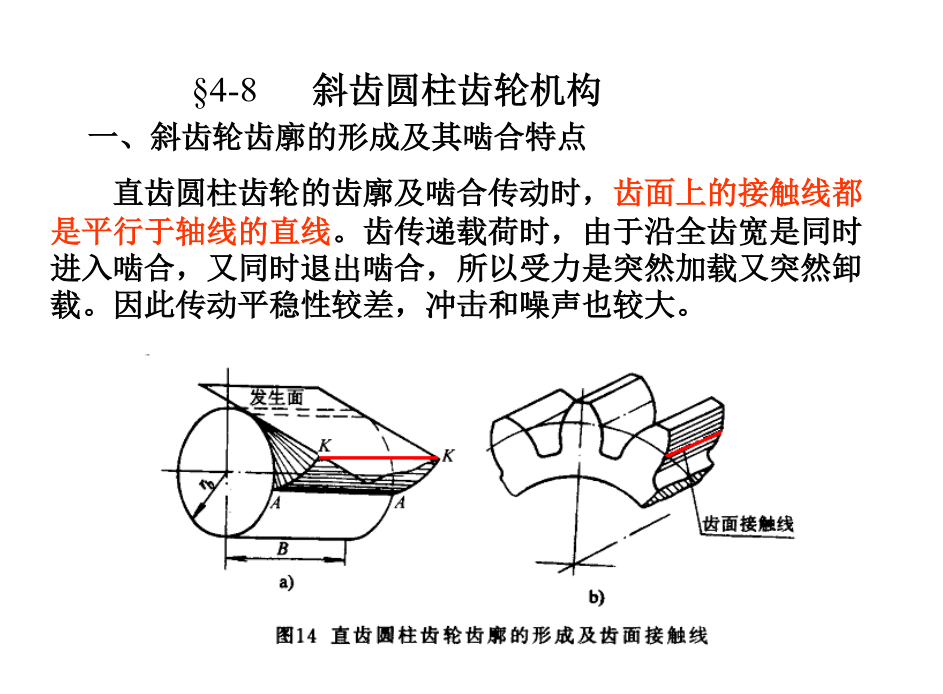
二、变位齿轮及其齿厚的确定2.变位齿轮的原理以切削标准齿轮时的位置为基准,刀具的移动距离xm称为变位量,x称为变位系数。规定刀具远离轮坯中心时由d=mz和db=dcosα可以推知,变位齿轮的分度圆和基圆也保持不变。角速比和定角速比性质也保持不变。其分度线上的齿条齿槽宽比中线上的齿槽宽增大了2ab,故齿轮的分度圆齿厚也增大了2ab;与此相应,齿轮分度圆上的齿槽宽则减小了2ab。因此变位齿轮分度圆齿厚和齿槽宽的计算式分别为因此变位齿轮分度圆齿厚和齿槽宽的计算式分别为§4-8斜齿圆柱齿轮机构§4-8斜齿圆柱齿轮

变位齿轮与变位齿轮传动PPT.ppt
变位齿轮与变位齿轮传动6.6.1问题的提出6.6.1问题的提出6.6.2变位齿轮6.6.2变位齿轮相应的齿顶圆半径也变为4变位齿轮的参数和几何尺寸实际上,变位齿轮的齿廓曲线与标准齿轮的齿廓曲线是同一个基圆上展出的渐开线,只不过所截取的部位不同而已,如图所示。(2)不适用于实际中心距与标准中心距不等场合。齿轮修正的方法较多,其中最常用的方法是变位修正法,用变位修正法设计制造出的齿轮称为变位齿轮。4变位齿轮的参数和几何尺寸当用标准齿条型刀具加工标准齿轮时,刀具的中心线从刀具的节线处向外移动了xm距离,这个距离

变位齿轮与变位齿轮传动ppt课件.ppt
6.6变位齿轮与变位齿轮传动6.6.1问题的提出6.6.1问题的提出6.6.2变位齿轮6.6.2变位齿轮6.6.3最小变位系数xmin6.6.3最小变位系数xmin6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.4变位齿轮的参数和几何尺寸6.6.5变位齿轮传动感谢亲观看此幻灯片

轮系概要.pptx
宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大学专用作者:潘存云教授宁夏大

关于变位齿轮变位系数优化设计.docx
关于变位齿轮变位系数优化设计变位齿轮是一种重要的机械传动装置,在许多工业领域中应用广泛。变位齿轮的正确设计和制造对机械传动装置的性能至关重要。其中,变位系数是一个重要的参数,它决定了变位齿轮传动的效率和噪音水平。本文将详细介绍变位齿轮变位系数的优化设计,讨论其对变位齿轮传动性能的影响。一、变位齿轮的基本原理变位齿轮是一种将两个旋转轴之间的旋转运动传递下去的传动装置。齿轮可以通过直接接触以及齿间润滑来传递动力,变位齿轮则是可以实现变速传动的一种特殊形式。变位齿轮由两个或多个组成,其中至少有一个齿轮的齿形是曲