
基于逆透视投影变换的单目视觉定位方法.pdf

森林****io


1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于逆透视投影变换的单目视觉定位方法.pdf
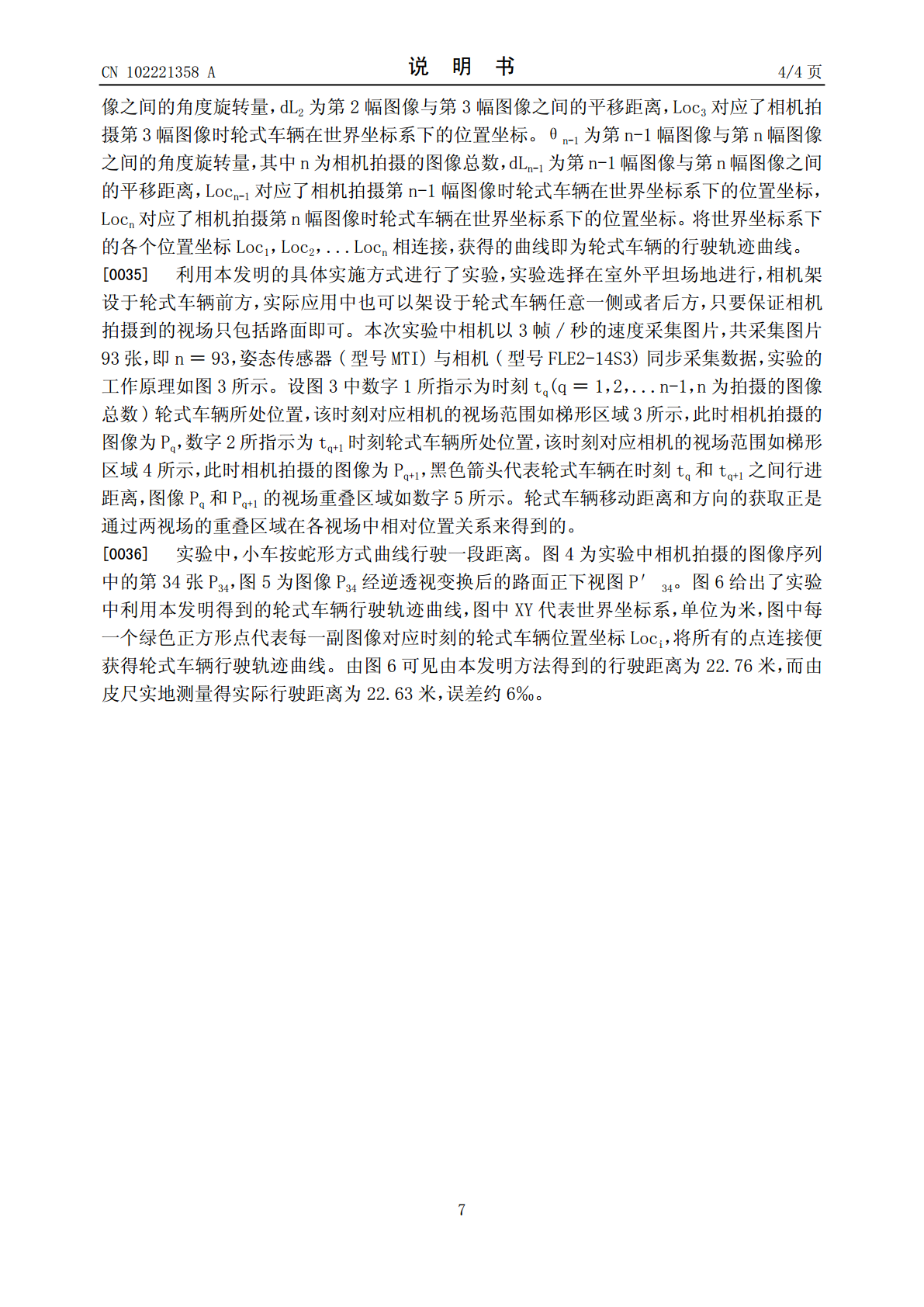
本发明提供一种基于逆透视投影变换的单目视觉定位方法,采用的技术方案如下:将姿态传感器与相机固定在一起,安装在轮式车辆上,对行驶过程中拍摄的图像进行下述处理:第一步,对图像序列进行逆透视投影变换;第二步,计算相邻图像间的变换矩阵;第三步,确定轮式车辆行驶轨迹曲线。本发明的有益效果是利用姿态传感器获得的实时姿态信息辅助轮式车辆的定位,获得了较高精度的定位结果;将图像进行逆透视投影变换,消除了透视效果,进一步提高了轮式车辆定位精度。

基于平透视投影变换的单目视觉头部姿态估计.docx
基于平透视投影变换的单目视觉头部姿态估计摘要:本文提出了一种基于平透视投影变换的单目视觉头部姿态估计方法。该方法利用深度学习方法识别人脸并提取头部特征点,然后通过平透视投影变换将头部姿态映射到二维平面上,并利用旋转矩阵分解算法估计头部姿态。实验结果表明,该方法能够准确地估计头部姿态,并且对于不同姿态下的人脸具有较好的鲁棒性。关键词:平透视投影变换,单目视觉,深度学习,头部姿态估计1.介绍头部姿态估计是计算机视觉和人机交互领域的一个重要研究方向。它可以用于许多应用,例如人机界面、游戏控制、虚拟现实等。在许多

基于平透视投影变换的单目视觉头部姿态估计的任务书.docx
基于平透视投影变换的单目视觉头部姿态估计的任务书任务:基于平透视投影变换的单目视觉头部姿态估计背景:计算机视觉和机器学习技术的发展,为人机交互和智能系统提供了更多的可能,其中包括对人体姿态的识别和估计。人体姿态估计有多种方式,其中又以头部姿态估计应用最为广泛。头部姿态估计是一项重要的技术,它可以被应用于众多应用领域,例如游戏、电子商务、医学、心理学等。以维护作为一项主要识别人的重要特征之一的脸部为例,基于头部姿态估计技术,可以实现面部识别、眼球跟踪以及使用表情等应用。人类的头部姿态是相对于身体而言的,也能

基于视觉的单目SLAM方法研究.docx
基于视觉的单目SLAM方法研究摘要:单目SLAM(SimultaneousLocalizationandMapping)是一种基于视觉的定位与建图技术,在无人驾驶、增强现实、机器人导航等领域具有重要应用。本文综述了基于视觉的单目SLAM方法的研究进展,主要包括特征点法、直接法和深度学习方法。特征点法通过检测和描述特征点的位置和外观来进行定位和建图,是最常用的方法之一;直接法通过直接匹配像素的亮度信息来估计相机的位姿,避免了特征提取和匹配的过程;深度学习方法将深度估计任务与SLAM任务结合,通过神经网络学习

基于SURF算法的单目转双目视觉定位.docx
基于SURF算法的单目转双目视觉定位摘要在机器视觉与计算机图形学领域,单目视觉和双目视觉都是广泛应用的技术。其中,双目视觉的优点在于其可以提供更多的深度信息和更高的精度。本文主要介绍了基于SURF算法的单目转双目视觉定位技术,包括SURF算法的基本原理及其在单目转双目视觉定位中的应用,以及该技术的实验结果和展望。关键词:SURF算法、单目视觉、双目视觉、定位1.引言随着计算机技术和机器视觉技术的发展,单目视觉和双目视觉技术广泛应用于各个领域中。在现实世界的应用中,随着场景复杂度的增加以及对深度精度要求的提