
一种模位驱动装置.pdf

努力****爱静


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种模位驱动装置.pdf
本发明公开的一种模位驱动装置,属于生产设备领域,特别涉及多模位的生产设备。包括:机架、可运转地装于机架上的带若干销轴孔的主链条、若干装于该销轴孔的小轴和从动轮、至少一条装于机架上的柔性带、该柔性带可啮合地周期循环作用在各从动轮上。由于采用了有齿啮合,就能够实现各模位的无打滑精确驱动;如果柔性带以不同的速度运动,各模位就可获不同的自转速度,实现了在实际生产中不同产品需要的自转速度。
一种驱动装置及开合模装置.pdf
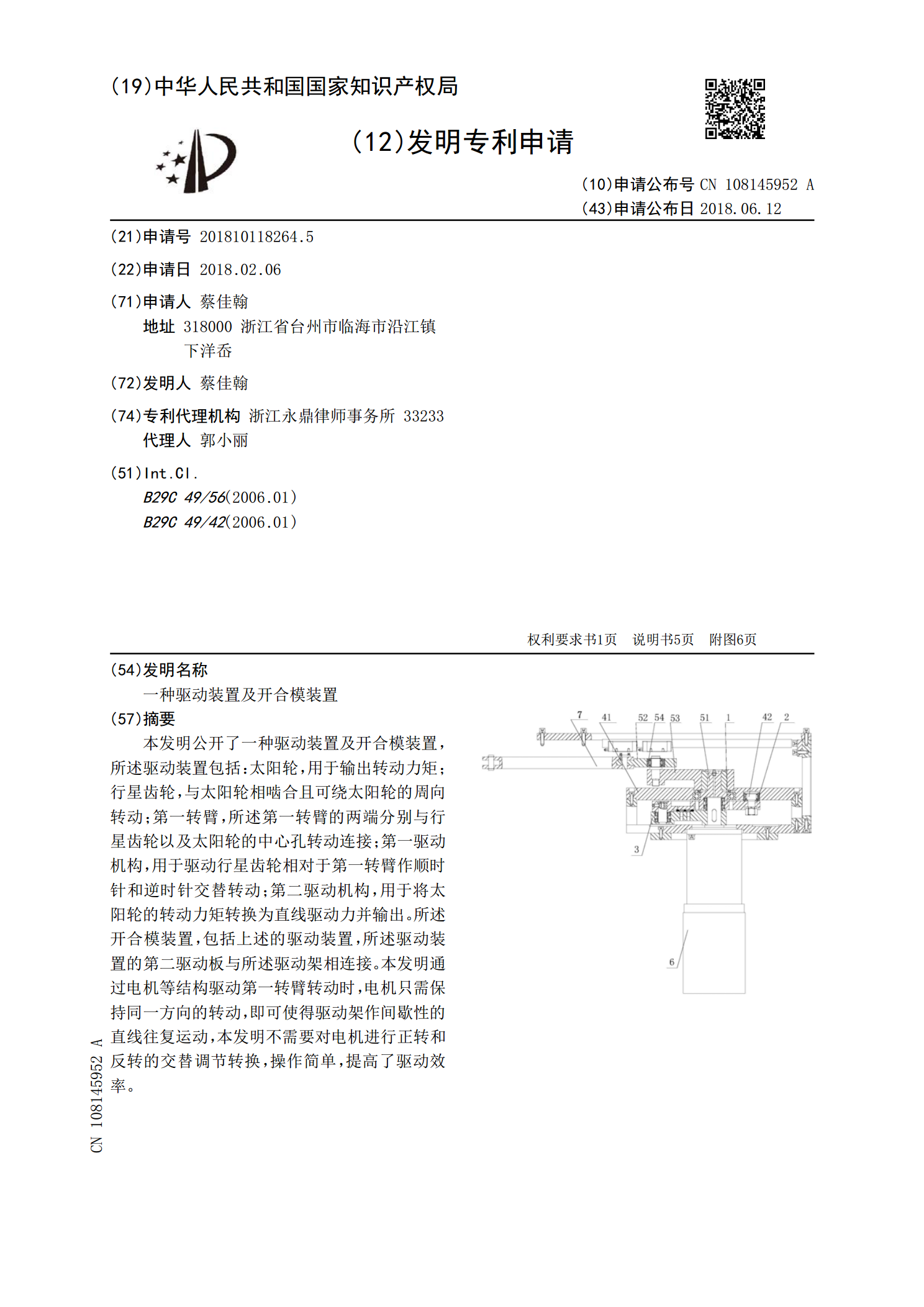
本发明公开了一种驱动装置及开合模装置,所述驱动装置包括:太阳轮,用于输出转动力矩;行星齿轮,与太阳轮相啮合且可绕太阳轮的周向转动;第一转臂,所述第一转臂的两端分别与行星齿轮以及太阳轮的中心孔转动连接;第一驱动机构,用于驱动行星齿轮相对于第一转臂作顺时针和逆时针交替转动;第二驱动机构,用于将太阳轮的转动力矩转换为直线驱动力并输出。所述开合模装置,包括上述的驱动装置,所述驱动装置的第二驱动板与所述驱动架相连接。本发明通过电机等结构驱动第一转臂转动时,电机只需保持同一方向的转动,即可使得驱动架作间歇性的直线往复

一种模内攻牙驱动装置.pdf
本发明公开了一种模内攻牙驱动装置,包括齿轮箱、盖板和连接板,所述齿轮箱的背面固定连接有安装板,所述安装板的内部开设有上下键槽,所述安装板的底部固定连接有主动齿轮,所述安装板的底部通过连接轴固定连接有与主动齿轮相啮合的第一齿轮,所述安装板的底部通过连接轴固定连接有与第一齿轮相啮合的第二齿轮,本发明涉及模内攻牙技术领域。该模内攻牙驱动装置,通过安装板的内部开设有上下键槽,打破传统的加工方式,将传统的冲压与攻丝技术整合在一起,在模具内直接成型,减少了生产工序,缩短了加工的时间,降低了生产成本,提高了生产效率,其
模台驱动装置.pdf
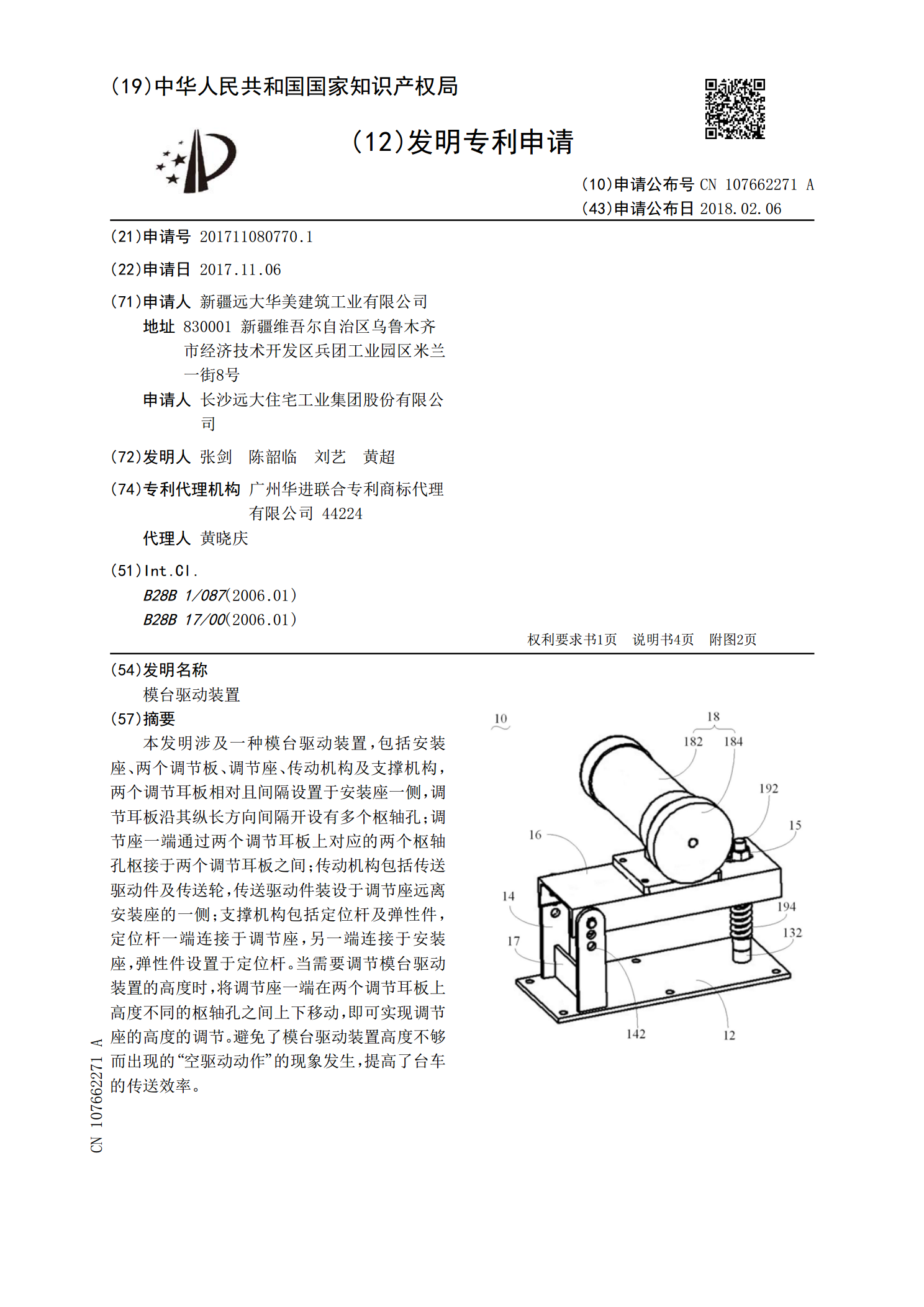
本发明涉及一种模台驱动装置,包括安装座、两个调节板、调节座、传动机构及支撑机构,两个调节耳板相对且间隔设置于安装座一侧,调节耳板沿其纵长方向间隔开设有多个枢轴孔;调节座一端通过两个调节耳板上对应的两个枢轴孔枢接于两个调节耳板之间;传动机构包括传送驱动件及传送轮,传送驱动件装设于调节座远离安装座的一侧;支撑机构包括定位杆及弹性件,定位杆一端连接于调节座,另一端连接于安装座,弹性件设置于定位杆。当需要调节模台驱动装置的高度时,将调节座一端在两个调节耳板上高度不同的枢轴孔之间上下移动,即可实现调节座的高度的调节

一种上下旋转模的驱动装置.pdf
一种上下旋转模的驱动装置。本发明通过伺服电机同步驱动上蜗轮蜗杆和下蜗轮蜗杆运动,上下蜗轮蜗杆分别设置在上、下模架上,上蜗轮蜗杆驱动上模架旋转,上模架包括和上蜗轮蜗杆配合的上外转套,上外转套内设上旋转套,在上旋转套内设有旋转轴,旋转轴下部设两分开的与上旋转模配合叉头,上模架上设有升降气缸;下涡轮蜗杆驱动下模架选装,下模架包括和下蜗轮蜗杆配合的下外转套,下外转套内设下旋转套,在下旋转套内设有旋转轴对应的套管,套管上部设和下旋转模配合的拨叉转套,下模架上设有升降气缸。本发明的优点是:驱动装置和定位装置一体式设计