
用于监视风力涡轮机的操作的方法和系统.pdf

猫巷****奕声


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于监视风力涡轮机的操作的方法和系统.pdf
本发明涉及用于监视风力涡轮机的操作的方法和系统,具体而言,涉及一种风力涡轮机(10)转子叶片变桨系统(42),包括:转子叶片变桨制动器(48);变桨致动器(46);位移传感器(52),其构造成测量变桨致动器的位移;以及处理器(64),其与位移传感器通信联接并构造成确定对应于在变桨制动器接合时测出的变桨致动器的位移的制动器磨损水平。

用于优化风力涡轮机操作的系统和方法.pdf
本公开涉及一种用于优化风力涡轮机的操作的系统和方法。该方法包括在功率网与风力涡轮机之间提供电压调节器。所述电压调节器配置成控制风力涡轮机的至少一个电压状态。另一个步骤包括通过一个或多个传感器监测风力涡轮机的至少一个操作状态和至少一个电压状态。方法还包括通过控制器将操作状态或者电压状态中的至少一个与预定阈值相比较以确定裕度与阈值比。这样,进一步的步骤包括基于比较来控制电压调节器以使裕度与阈值比最大化。

用于控制风力涡轮机的操作的方法和系统.pdf
本发明公开一种用于控制风力涡轮机的操作的方法和系统。所述方法包括确定所述风力涡轮机的至少一个部件的警报等级的步骤。在至少一个部件的警报等级超出预定等级的情况下,所述方法包括在当前操作条件下评估所述部件的预期剩余寿命,并且控制所述风力涡轮机的操作以将所述部件的所述预期剩余寿命调整到所述部件的期望的预期剩余寿命。从而,可以延长所述部件的所述预期剩余寿命直到下一个预定业务事件发生。显著降低了风力涡轮机的停机时间,并且将未预定业务事件避免到最大可能程度。延长了平均检查间隔时间(MTBI)。
用于操作风力涡轮机的方法和系统.pdf
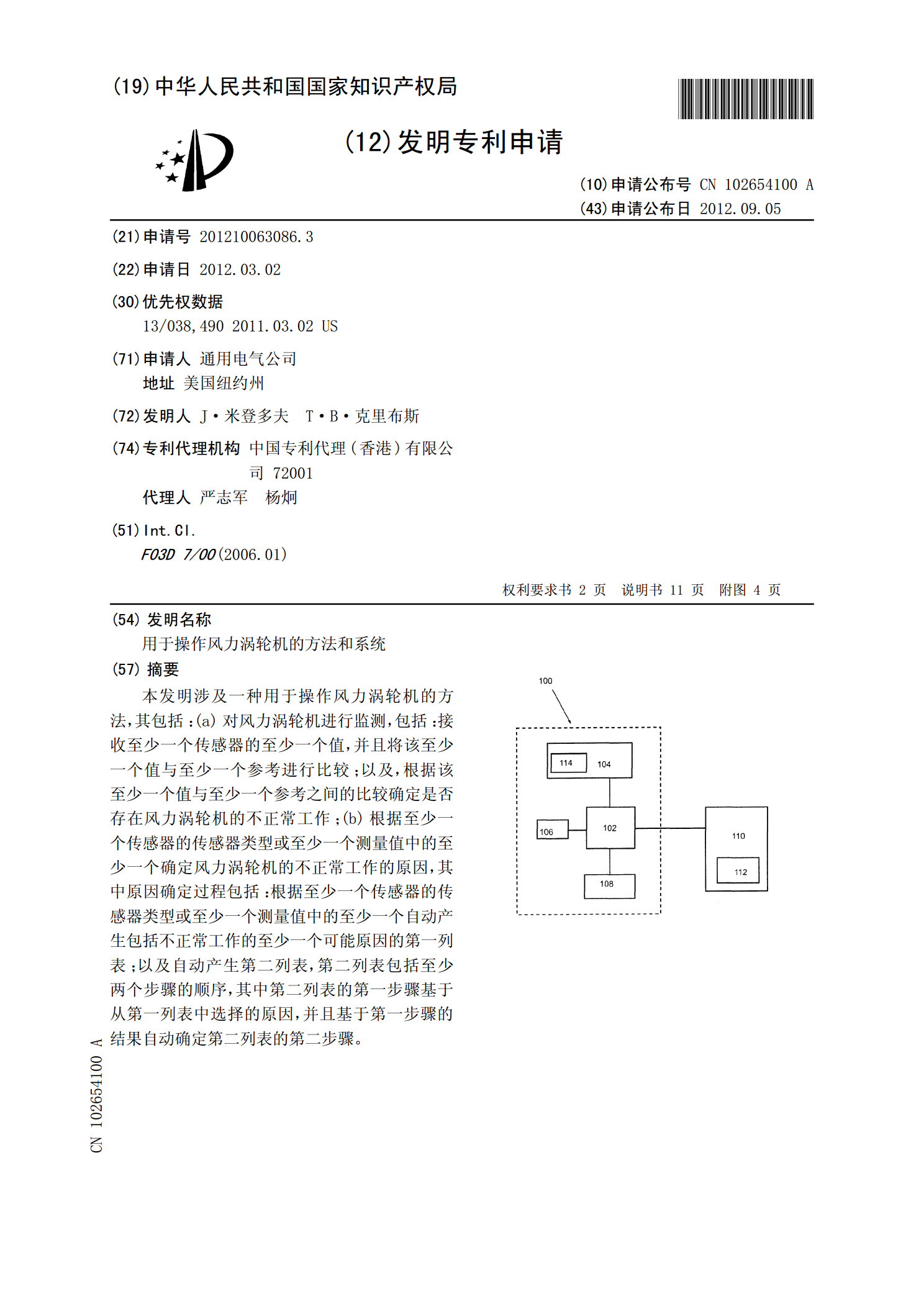
本发明涉及一种用于操作风力涡轮机的方法,其包括:(a)对风力涡轮机进行监测,包括:接收至少一个传感器的至少一个值,并且将该至少一个值与至少一个参考进行比较;以及,根据该至少一个值与至少一个参考之间的比较确定是否存在风力涡轮机的不正常工作;(b)根据至少一个传感器的传感器类型或至少一个测量值中的至少一个确定风力涡轮机的不正常工作的原因,其中原因确定过程包括:根据至少一个传感器的传感器类型或至少一个测量值中的至少一个自动产生包括不正常工作的至少一个可能原因的第一列表;以及自动产生第二列表,第二列表包括至少两个

用于操作风力涡轮机的方法和系统.pdf
描述一种用于减小极距滑动的电网相关功率限制器系统(152)。该系统包括功率限制器(180),它配置成接收锁相环(PLL)误差信号(190)和终端电网电压反馈信号(160)中的至少一个,并且基于PLL误差信号和终端电网电压反馈信号中的至少一个来产生功率命令信号(198)。该系统还包括耦合到功率限制器的功率调节器(182)。功率调节器配置成接收功率命令信号,至少部分基于功率命令信号来产生实际电流命令信号(166),并且将实际电流命令信号传送给控制器(156)。