
一种月球深层土壤采集器的钻杆夹持装置.pdf

新槐****公主


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种月球深层土壤采集器的钻杆夹持装置.pdf
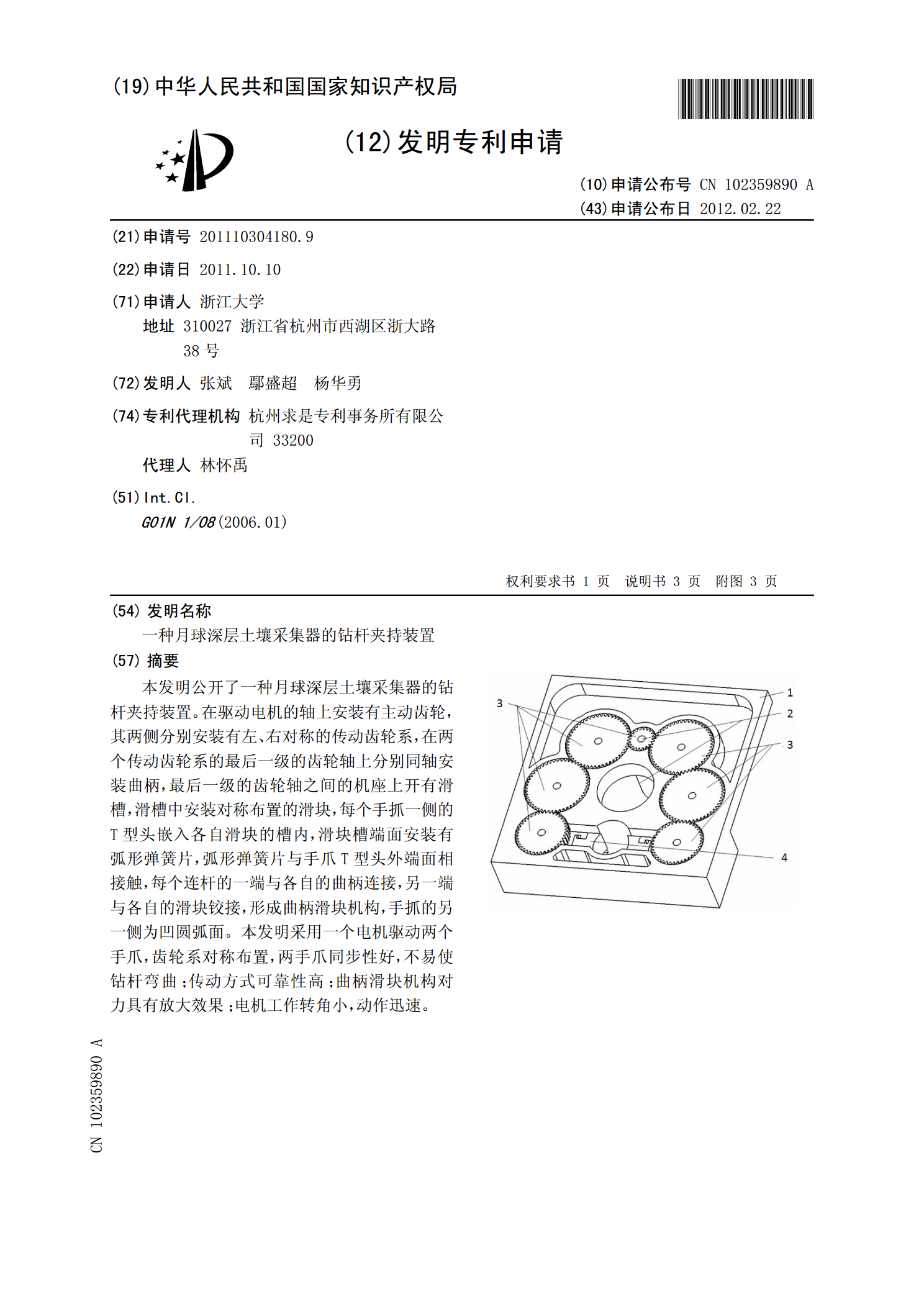
本发明公开了一种月球深层土壤采集器的钻杆夹持装置。在驱动电机的轴上安装有主动齿轮,其两侧分别安装有左、右对称的传动齿轮系,在两个传动齿轮系的最后一级的齿轮轴上分别同轴安装曲柄,最后一级的齿轮轴之间的机座上开有滑槽,滑槽中安装对称布置的滑块,每个手抓一侧的T型头嵌入各自滑块的槽内,滑块槽端面安装有弧形弹簧片,弧形弹簧片与手爪T型头外端面相接触,每个连杆的一端与各自的曲柄连接,另一端与各自的滑块铰接,形成曲柄滑块机构,手抓的另一侧为凹圆弧面。本发明采用一个电机驱动两个手爪,齿轮系对称布置,两手爪同步性好,不易
一种月球深层土壤采集器的回收装置.pdf
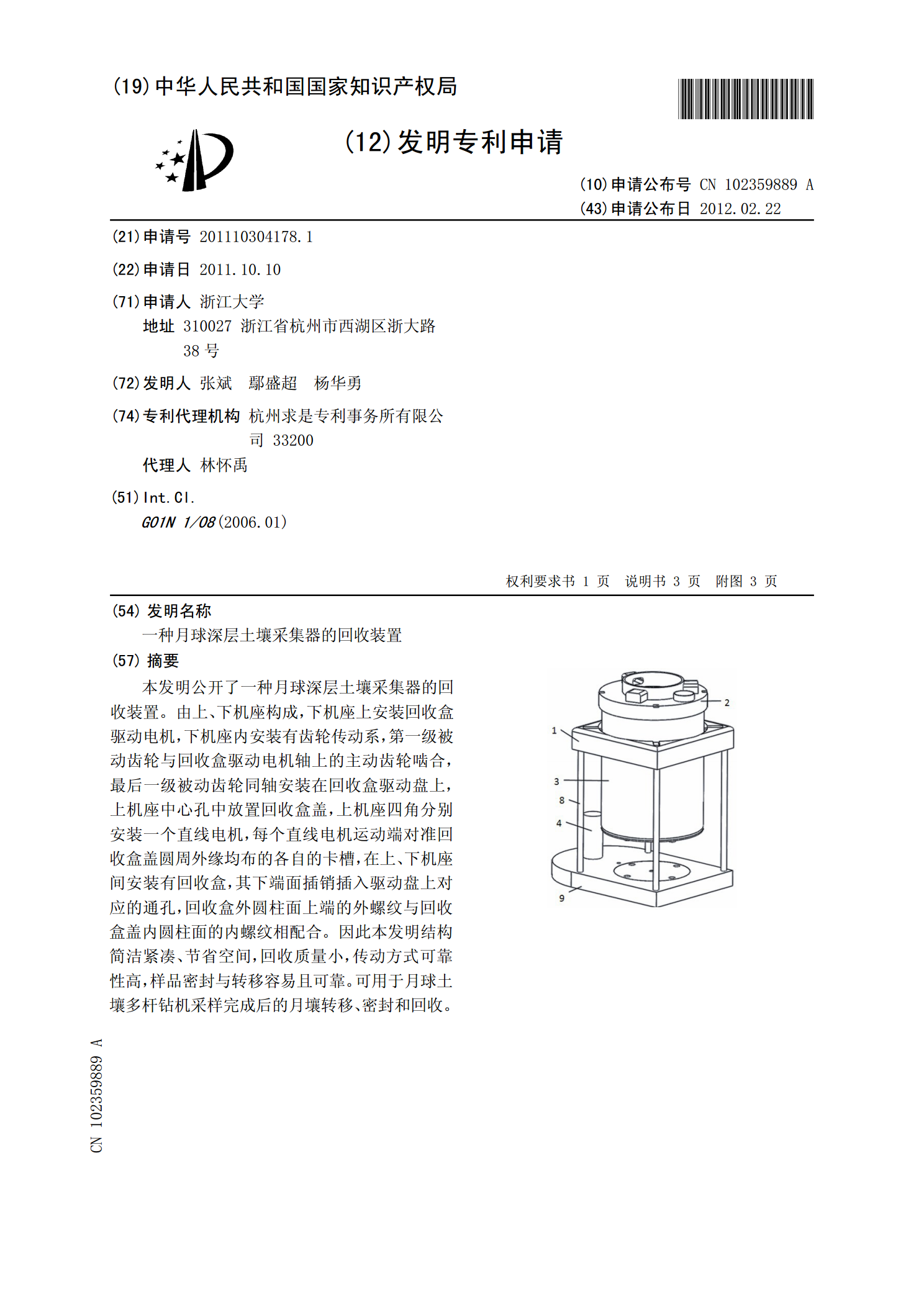
本发明公开了一种月球深层土壤采集器的回收装置。由上、下机座构成,下机座上安装回收盒驱动电机,下机座内安装有齿轮传动系,第一级被动齿轮与回收盒驱动电机轴上的主动齿轮啮合,最后一级被动齿轮同轴安装在回收盒驱动盘上,上机座中心孔中放置回收盒盖,上机座四角分别安装一个直线电机,每个直线电机运动端对准回收盒盖圆周外缘均布的各自的卡槽,在上、下机座间安装有回收盒,其下端面插销插入驱动盘上对应的通孔,回收盒外圆柱面上端的外螺纹与回收盒盖内圆柱面的内螺纹相配合。因此本发明结构简洁紧凑、节省空间,回收质量小,传动方式可靠性

一种月球深层土壤采集器.pdf
本发明公开了一种月球深层土壤采集器。外壳上端面有钻机与机械臂连接器,外壳内从上到下安装三层隔板,丝杆驱动电机安装在第一隔板上,通过齿轮驱动丝杆,与丝杆配合的滑块固连在滑块上,滑块一端四个通孔穿过导杆,四根导杆中间安装钻管驱动电机,通过齿轮驱动钻管连接头,其内有电磁铁驱动楔子,楔子伸出对应钻管内锥面的销槽,钻管转盘安装于第二隔板中心,与钻管转盘驱动电机通过齿轮配合,夹紧装置下为第三隔板,钻头转盘上周向安装若干钻头,第三隔板上钻头转盘驱动电机与钻头转盘通过齿轮配合,中空钻管内部封装有月壤袋。本发明具有结构紧凑

一种夹持器以及多功能钻机的钻杆夹持装置.pdf
本发明公开一种夹持器以及多功能钻机的钻杆夹持装置,夹持器包括驱动机构以及相对设置的两夹具头,两夹具头之间留有夹持空间;各夹具头分别包括夹持块和虎牙板,夹持块一端连接一驱动机构的伸缩驱动杆,另一端分别转动连接两块虎牙板,两虎牙板上下布置,且上虎牙板的下端以及下虎牙板的上端分别朝夹持块方向倾斜,使得两夹具头上的各虎牙板板面分别朝向夹持空间的中心。夹持装置包括底座和安装于底座上的、分别含有上述夹持器的外钻杆夹持单元、内钻杆夹持单元和卸扣单元,卸扣单元的夹持器可转动,以在钻杆的外钻杆和内钻杆被夹持后,对待拆装的内
钻杆加工的辅助夹持装置.pdf
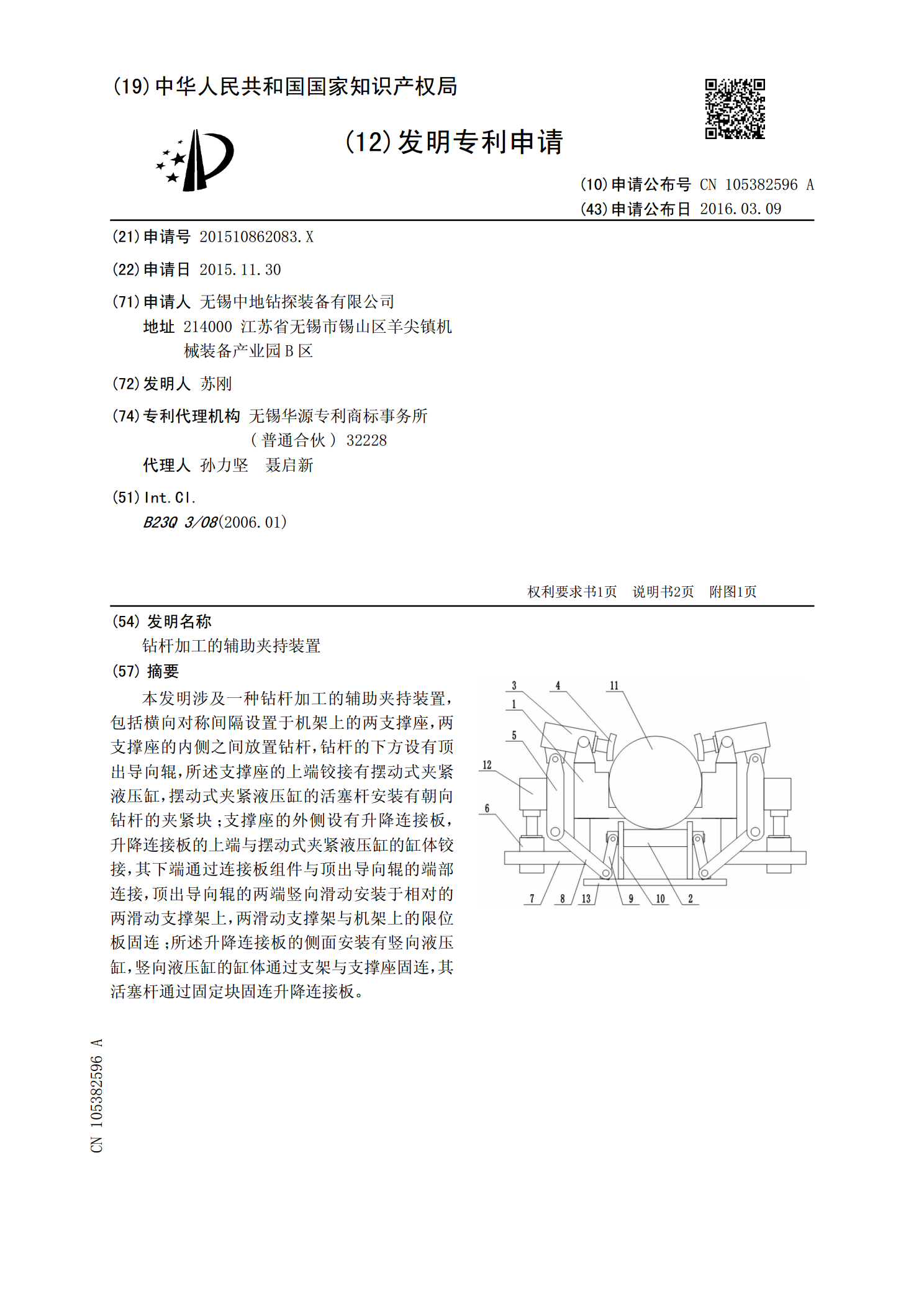
本发明涉及一种钻杆加工的辅助夹持装置,包括横向对称间隔设置于机架上的两支撑座,两支撑座的内侧之间放置钻杆,钻杆的下方设有顶出导向辊,所述支撑座的上端铰接有摆动式夹紧液压缸,摆动式夹紧液压缸的活塞杆安装有朝向钻杆的夹紧块;支撑座的外侧设有升降连接板,升降连接板的上端与摆动式夹紧液压缸的缸体铰接,其下端通过连接板组件与顶出导向辊的端部连接,顶出导向辊的两端竖向滑动安装于相对的两滑动支撑架上,两滑动支撑架与机架上的限位板固连;所述升降连接板的侧面安装有竖向液压缸,竖向液压缸的缸体通过支架与支撑座固连,其活塞杆通