
基于面积匹配优化K-均值聚类算法的图像分割处理方法.pdf

甲申****66

1/8

2/8

3/8

4/8

5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于面积匹配优化K-均值聚类算法的图像分割处理方法.pdf
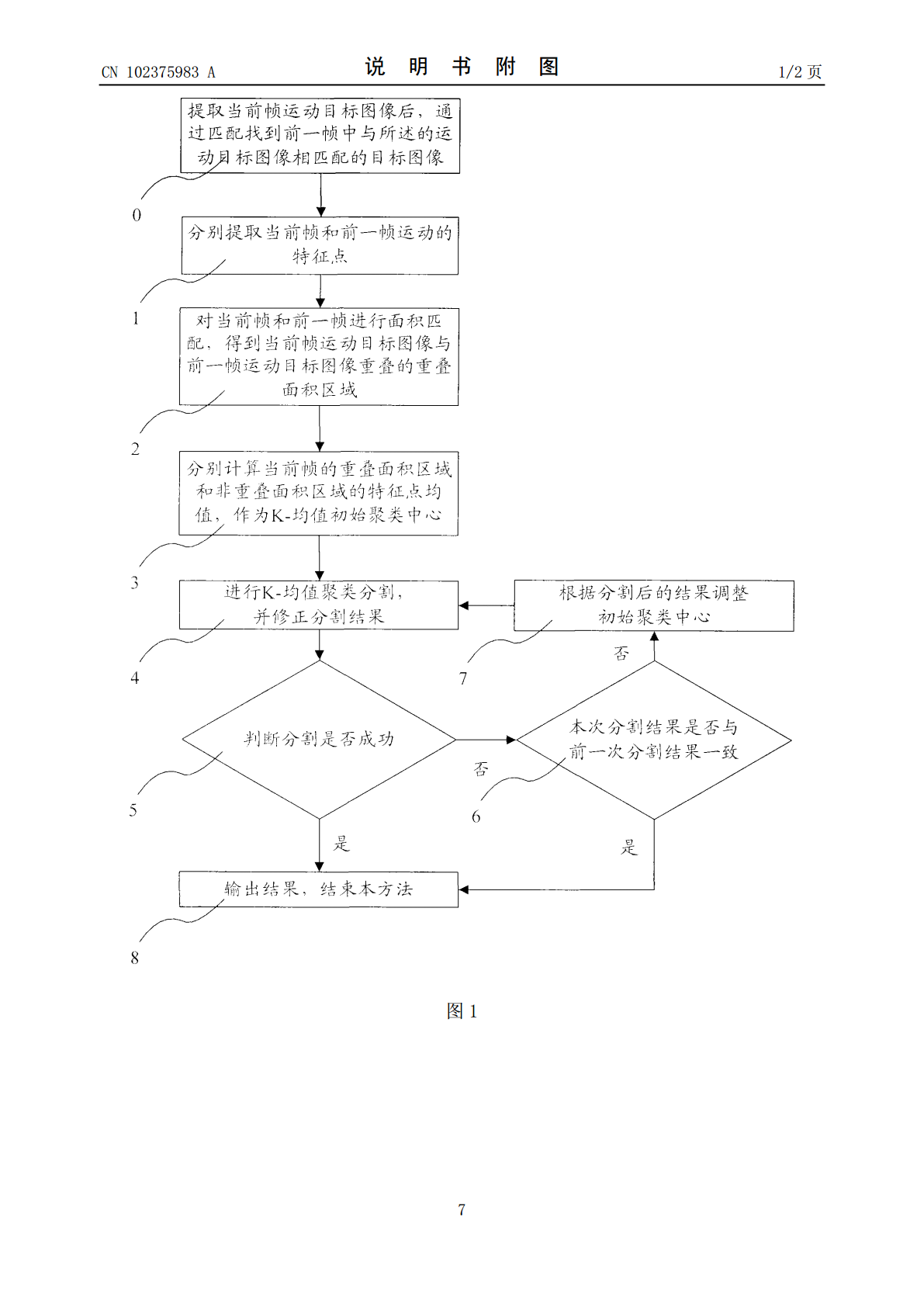
本发明涉及一种视频检测中基于面积匹配优化K-均值聚类算法的图像分割处理方法,其首先提取前后帧图像的车辆特征点,然后对比前后两帧车辆的面积重叠情况,提取面积重叠区域内特征点位置和剩余特征点位置,分别求取两组特征点均值作为待分割的两类初始聚类中心点,然后进行K-均值分割,根据输出的聚类结果修正面积重叠区域内特征点的分类情况,同时判断聚类后的车辆是否合理,如不合理,则对聚类结果重新聚类并重新统计聚类中心,直到找到合理的车辆后结束聚类分割,返回跟踪结果。该方法基于面积匹配优化,并且采用固定聚类个数进行分割,经过K

基于AHLO与K均值聚类的图像分割算法.docx
基于AHLO与K均值聚类的图像分割算法基于AHLO与K均值聚类的图像分割算法摘要:图像分割是计算机视觉和图像处理领域中的重要研究方向之一,它在很多应用中扮演着至关重要的作用。本论文针对图像分割问题,提出了一种基于AHLO(自适应高斯低通滤波器和颜色直方图增强)和K均值聚类的图像分割算法。该算法通过AHLO滤波器对图像进行初步预处理,然后结合K均值聚类算法进行图像分割,实现了更准确和鲁棒的图像分割结果。实验结果表明,该算法在不同类型的图像上具有较好的分割效果。关键词:图像分割,AHLO,K均值聚类,预处理1

基于PSO优化K均值聚类的葡萄果穗图像分割算法.docx
基于PSO优化K均值聚类的葡萄果穗图像分割算法基于PSO优化K均值聚类的葡萄果穗图像分割算法摘要:随着葡萄种植规模的不断扩大,葡萄果穗的图像分割成为了一个重要的问题。本文基于粒子群优化(PSO)算法优化的K均值聚类方法,提出了一种高效准确的葡萄果穗图像分割算法。首先,通过预处理步骤对葡萄果穗图像进行灰度化、直方图均衡化等操作,以便于后续的分割处理。然后,利用K均值聚类算法对图像进行初步分割,得到初始聚类中心。接着,引入PSO算法对聚类中心进行优化,通过粒子的速度和位置更新策略找到最优的聚类中心位置,从而提

基于Lab空间的K均值聚类彩色图像分割方法.pptx
基于Lab空间的K均值聚类彩色图像分割方法目录添加章节标题方法概述图像分割的意义传统图像分割方法基于Lab空间的K均值聚类方法的提出Lab空间特性Lab空间的定义Lab空间与RGB空间的区别Lab空间在图像分割中的优势K均值聚类算法原理K均值聚类算法简介K均值聚类算法的基本步骤K均值聚类算法的优缺点基于Lab空间的K均值聚类图像分割实现过程图像从RGB空间转换到Lab空间K均值聚类的应用聚类结果的解释与处理实验结果展示与对比分析方法优势与局限性基于Lab空间的K均值聚类方法优势方法的局限性改进方向应用前景

基于k均值聚类的图像分割研究2012.doc
多媒体通信课程论文姓名:严宏海班级:075102学号:20101003032专业:通信工程学院:机械与电子信息学院指导老师:刘勇日期:2012年10月20日k均值聚类在彩色图像分割中的应用研究摘要基于人类视觉将图像分割成若干个有意义的区域是目标检测和模式识别的基础。图像分割属于图像处理中一种重要的图像分析技术。图像分割的传统方法是对灰度图像分割处理图像的亮度分量简单快速。本论文首先介