
用于控制风力涡轮机的旋转速度的方法.pdf

一吃****春艳

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于控制风力涡轮机的旋转速度的方法.pdf
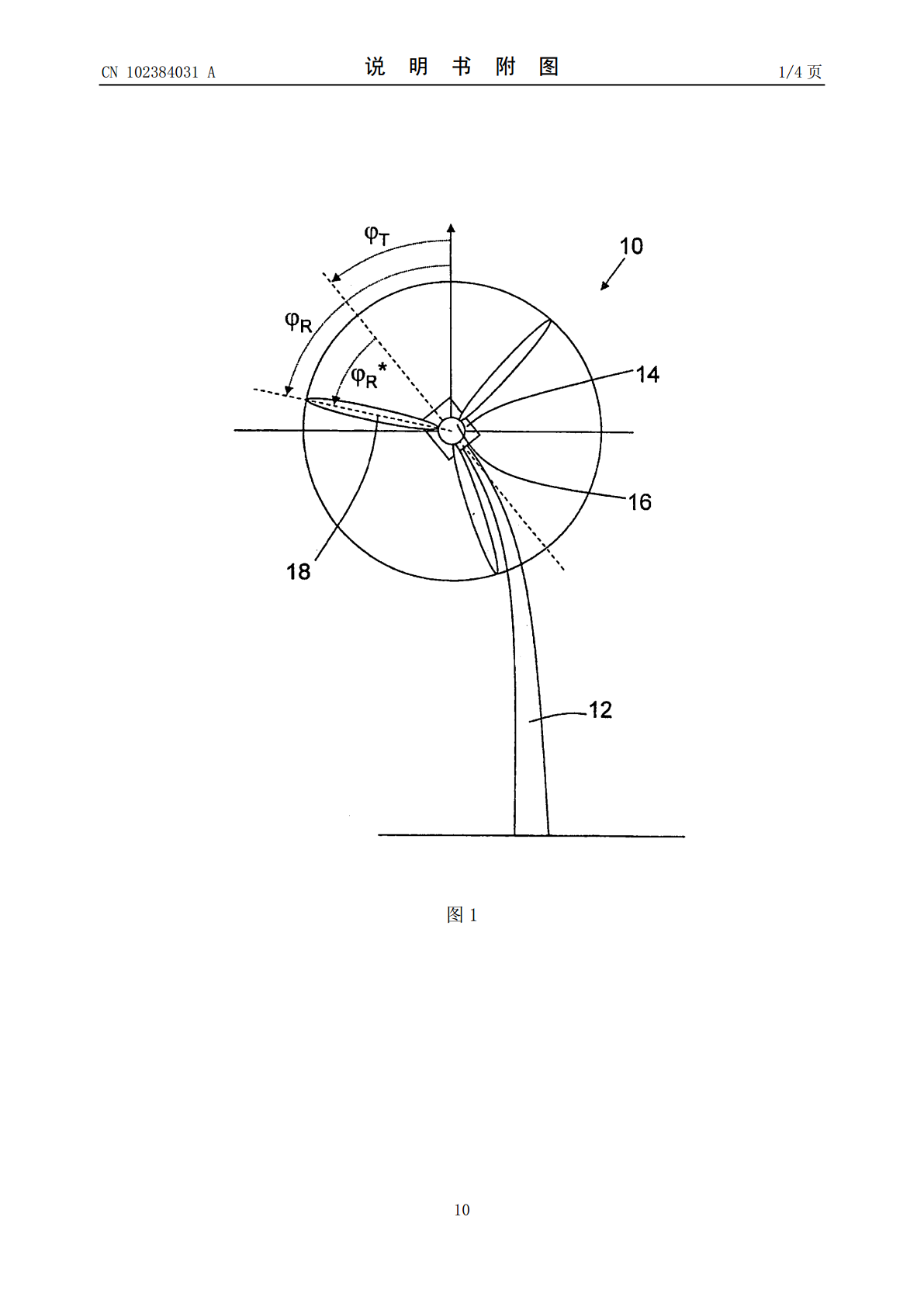
一种用于控制风力涡轮机的旋转速度的方法,该风力涡轮机具有塔架、安装在塔架上的机舱以及传动系,传动系包括具有至少一个转子桨叶的转子以及由转子驱动的发电机;转子绕着轴线可旋转地安装在机舱中,方法具有以下步骤:测量传动系的一元件的旋转速度,元件由转子对应于传动比地旋转;测量机舱相对于地面的运动;用速度控制器控制旋转速度至旋转速度设定值,速度控制器输出发电机扭矩和/或桨叶间距角度;在机舱固定坐标系统中测量得到的旋转速度被转换成校正的旋转速度,校正的旋转速度对应于与传动比相乘的在地面固定坐标系中的转子的旋转速度;以
用于控制风力涡轮机旋转速度的方法和系统.pdf
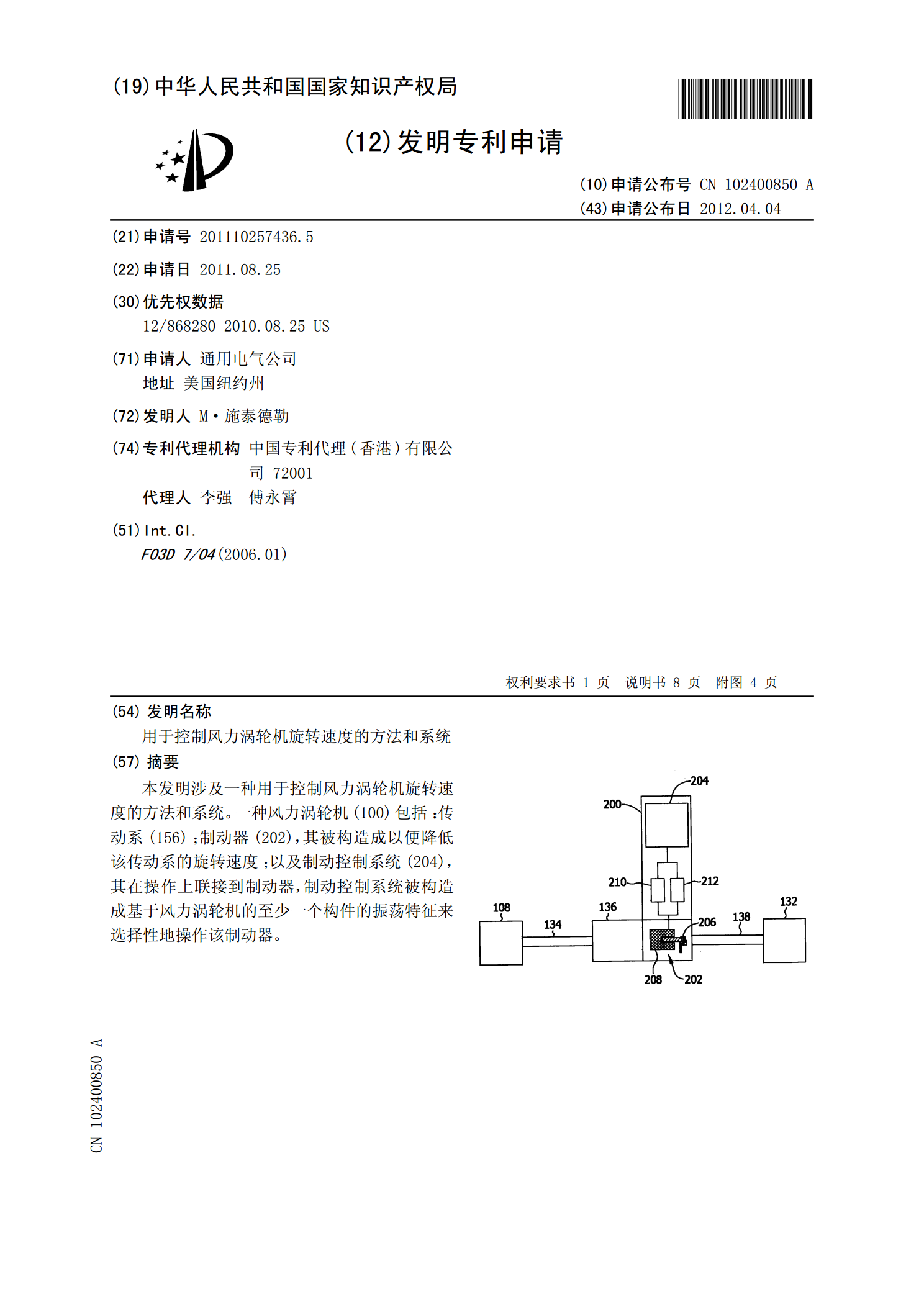
本发明涉及一种用于控制风力涡轮机旋转速度的方法和系统。一种风力涡轮机(100)包括:传动系(156);制动器(202),其被构造成以便降低该传动系的旋转速度;以及制动控制系统(204),其在操作上联接到制动器,制动控制系统被构造成基于风力涡轮机的至少一个构件的振荡特征来选择性地操作该制动器。

风力涡轮机的旋转速度控制方法以及风力发电系统.pdf
提供了一种用于风力涡轮机的旋转速度控制方法,其中,在低风速下将风轮的旋转速度加速至固定速度,使得发电效率大幅提高。该方法重复以下控制:当风速检测装置24检测到使得能够从发电机3输出所产生的电力的额定平均风速时,自动地启动原动机14并且加速风轮2的旋转直到风轮的圆周速度或者旋转速度达到特定值,然后停止原动机14;当风速检测装置24再次检测到额定平均风速时,自动地重新启动原动机14并加速风轮的旋转;以及当风轮2的圆周速度或旋转速度达到特定值时停止原动机14。

用于控制风力涡轮机的叶片的末梢速度的方法和装置.pdf
本发明涉及用于控制风力涡轮机的叶片的末梢速度的方法和装置,具体而言,涉及一种风力涡轮机(10),其包括转子(18)、联接到所述转子(18)上的发电机(26)、用于感测风力涡轮机(10)的状况的传感器(46,48,50,52,54,55)以及联接到传感器(46,48,50,52,54,55)上的控制系统(40)。该控制系统(40)配置成通过确定紧邻风力涡轮机(10)的风速而控制转子(18)叶片(24)的末梢(25)的速度,并将确定的风速与第一编程标称风速以及第二编程标称风速进行比较。

风力涡轮机及用于控制风力涡轮机的方法.pdf
本发明涉及风力涡轮机及用于控制风力涡轮机的方法。具体而言,本公开内容涉及一种用于控制风力涡轮机的方法,该风力涡轮机包括风力转子轴、用于测量风力转子轴方位角的旋转编码器,其中该风力涡轮机还包括至少一个脉动产生装置,其包括至少一个第一零件和至少一个第二零件,其中该至少一个第一零件与风力转子轴一起旋转,而该至少一个第二零件设置成相对于风力转子轴静止,使得该至少一个第一零件移过该至少一个第二零件;其中该方法包括:通过旋转编码器将风力转子轴的方位角编码成旋转值;当脉动产生装置的至少一个第一零件中的一个移过至少一个第