
交通仿真课程百度交通仿真理论与技术.ppt

YY****。。

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共66页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

交通仿真课程百度交通仿真理论与技术.ppt
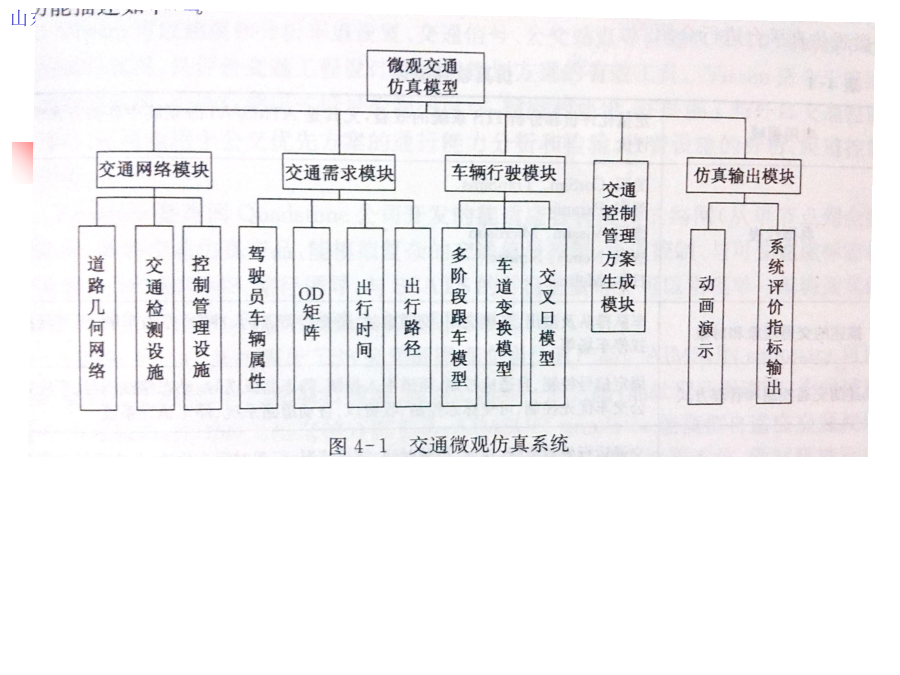
本章主要内容3.1微观交通仿真系统的结构和软件简介3.1.2交通仿真系统的特点交通流微观仿真系统具有以下优点:(1)便于模拟分析交叉口交通流运行情况,特别适宜于各种拓宽和渠化设计方案。(2)为各种信号控制方案提供预先仿真评价工作平台。(3)可仿真研究公交专用道的设计和公交车辆的运营状况,同时为公交线路、站点设计提供评价依据。(4)具有众多的仿真参数和功能,如可模拟路边停车场等。(5)把研究成果以动画形式形象地表达出来。不足之处:非机动交通流和混合交通流的仿真还不完善,系统的开发和维护需要专业人士负责,不利

交通仿真课程设计上.doc
《交通仿真A》——上机任务书合用专业:交通运送、物流工程课程名称:交通仿真课程性质:专业必修指导老师:李顺2023年9月预备工作学生上机前的准备工作重要有复习交通专业导论、道路工程、道路交通管理与控制、道路交通设计、交通规划等课程的基本概念及相关内容,并且认真阅读vissim使用手册。上机相关内容:认真参照《交通仿真实验教程》及其配套《交通仿真实验工程文献》进行入门操作练习。针对信号交叉口、无信号交叉口、环形交叉口进行分别仿真。数据设计及相关准备数据设计和准备的内容重要涉及以下三方面:道路几何尺寸、信号配

VANET仿真中交通仿真研究.docx
VANET仿真中交通仿真研究随着城市化步伐的加快,车辆数量和路网密度不断增加,使城市交通的拥堵和安全问题变得日益突出。为了解决这些问题,学术界和工业界开始将车辆自组织网络(VANET)技术应用于交通管理中。VANET是一种基于车辆间通信的网络,可用于车辆之间的信息交换和接入的通信,还能支持各类交通应用和服务。本文主要讨论VANET仿真中交通仿真的研究。交通仿真是仿真技术的一个重要领域,它可以为学术界和工业界提供研究和实验交通系统的评估工具。交通仿真是一种建模和模拟交通系统的技术,以研究性能、安全性、环境影
交通系统仿真课程教学大纲.doc
《交通系统仿真》课程教学大纲课程编码:MACH3004适用专业:城市交通运输专业学时:48学时学分:3学分一、编写说明(一)本课程的性质、目的和任务《交通系统仿真》是城市交通运输专业的一门专业基础课。是一门理论性与实践性均较强的专业课,是交通工程计算机仿真课程教学的重要辅助手段。通过实验,使理论与实践相结合,提高学生的实践能力。使学生掌握交通工程计算机仿真基本概念、基本理论、基本方法。学会运用微观仿真软件Vissim分析常见的交通管理、道路通行能力、信号赔时等问题,具备综合分析和处理各类交通问题的基本能力

交通仿真技术的研究与实现.docx
交通仿真技术的研究与实现随着城市化和人口增长,交通问题逐渐成为人们生活中的烦恼。交通问题的一个重要方面是交通拥堵。交通拥堵是城市交通管理的一大难题,影响了人们的工作、生活和生产等方面。因此,开发一种高效、可行的交通仿真技术成为工程师的一项重要任务。交通仿真技术是一种模拟交通流动和拥堵的技术。它可以帮助交通工程师研究交通流动的规律,预测交通拥堵的发生和最优化交通系统的控制。交通仿真技术可以模拟各种现实情况,例如车流量、车速、交通信号、停车场的使用率等等。可以根据仿真结果来制定更好的交通控制方案,从而使交通系