
机器人焊接系统清枪站的开发.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人焊接系统清枪站的开发.docx
机器人焊接系统清枪站的开发机器人焊接系统清枪站的开发摘要:随着工业自动化的发展,机器人焊接系统对于提高生产效率和产品质量起着重要的作用。而清枪站作为机器人焊接系统的一个重要组成部分,其功能主要是实现焊缝清除和实时检测。本论文将重点探讨机器人焊接系统清枪站的开发,阐述其设计原理、工作流程和关键技术,并讨论其在工业生产中的应用和发展前景。一、引言机器人焊接系统是利用机器人技术实现焊接操作的自动化系统,具有高效、精确、稳定的特点,在工业生产中得到广泛应用。而清枪站作为机器人焊接系统的重要组成部分,主要负责焊缝清
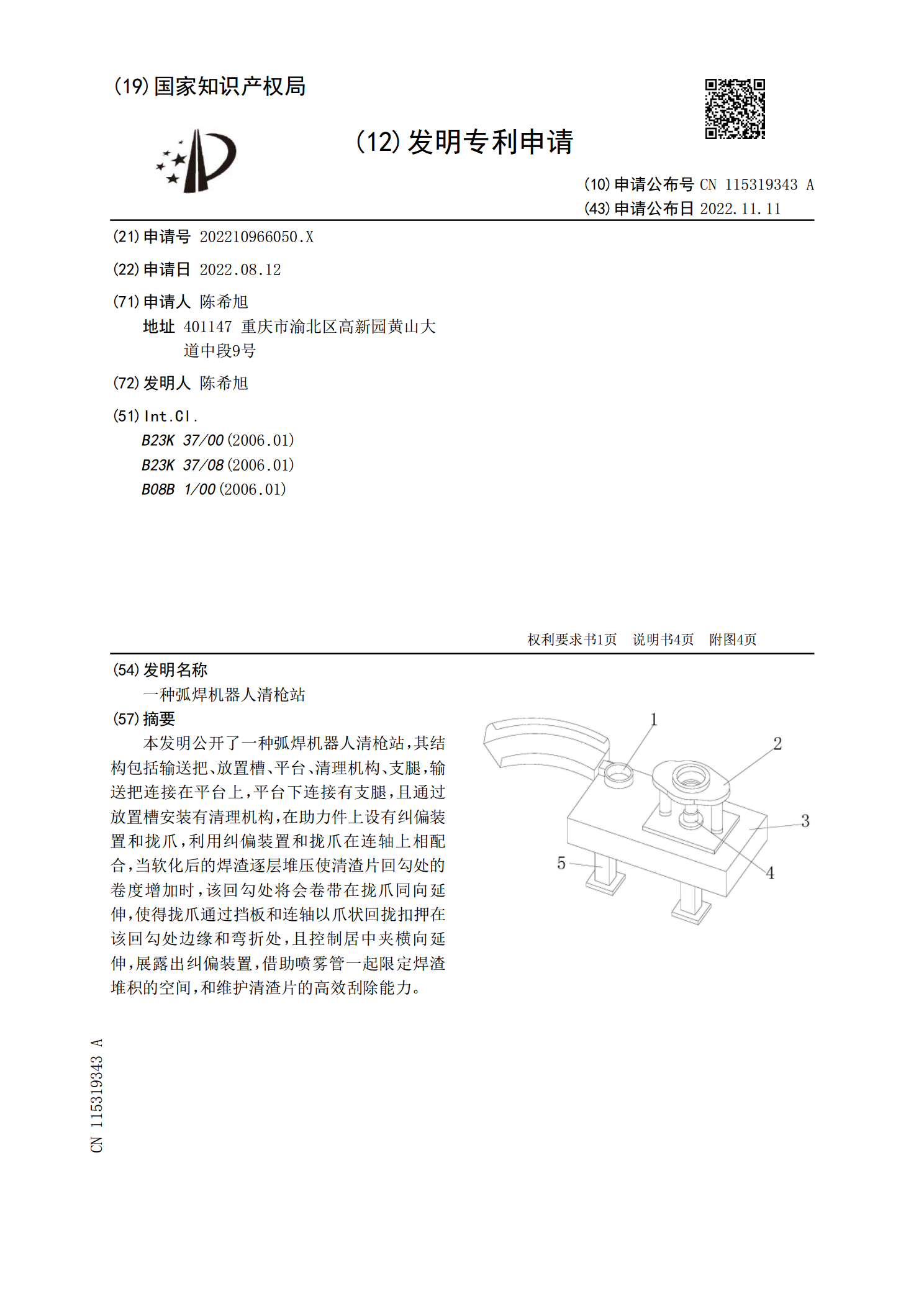
一种弧焊机器人清枪站.pdf
本发明公开了一种弧焊机器人清枪站,其结构包括输送把、放置槽、平台、清理机构、支腿,输送把连接在平台上,平台下连接有支腿,且通过放置槽安装有清理机构,在助力件上设有纠偏装置和拢爪,利用纠偏装置和拢爪在连轴上相配合,当软化后的焊渣逐层堆压使清渣片回勾处的卷度增加时,该回勾处将会卷带在拢爪同向延伸,使得拢爪通过挡板和连轴以爪状回拢扣押在该回勾处边缘和弯折处,且控制居中夹横向延伸,展露出纠偏装置,借助喷雾管一起限定焊渣堆积的空间,和维护清渣片的高效刮除能力。
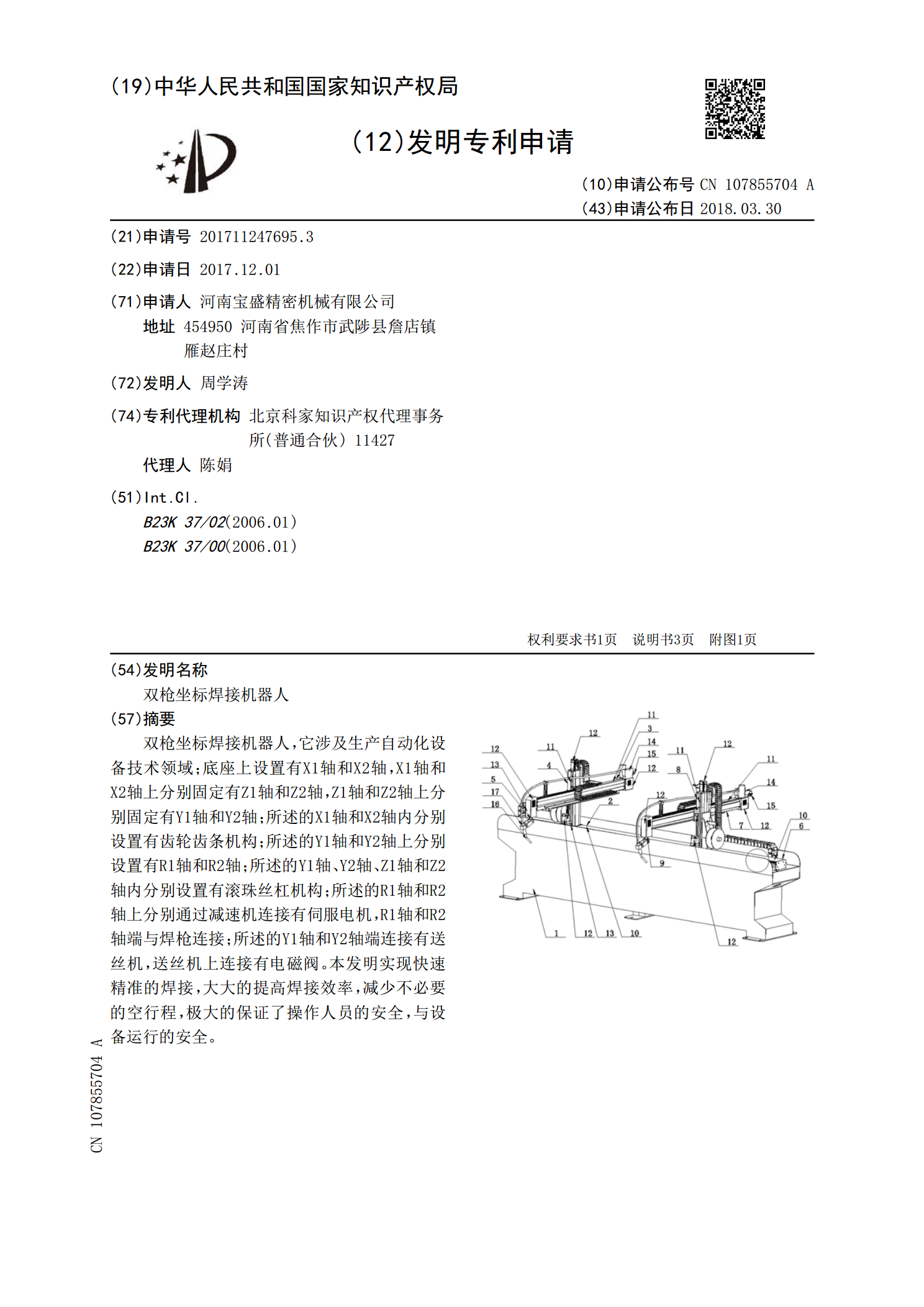
双枪坐标焊接机器人.pdf
双枪坐标焊接机器人,它涉及生产自动化设备技术领域;底座上设置有X1轴和X2轴,X1轴和X2轴上分别固定有Z1轴和Z2轴,Z1轴和Z2轴上分别固定有Y1轴和Y2轴;所述的X1轴和X2轴内分别设置有齿轮齿条机构;所述的Y1轴和Y2轴上分别设置有R1轴和R2轴;所述的Y1轴、Y2轴、Z1轴和Z2轴内分别设置有滚珠丝杠机构;所述的R1轴和R2轴上分别通过减速机连接有伺服电机,R1轴和R2轴端与焊枪连接;所述的Y1轴和Y2轴端连接有送丝机,送丝机上连接有电磁阀。本发明实现快速精准的焊接,大大的提高焊接效率,减少不必

焊接机器人工作站系统中焊接工艺的设计.docx
焊接机器人工作站系统中焊接工艺的设计焊接机器人工作站系统是现代焊接工艺中不可或缺的一部分。该系统将机器人和焊接装置相结合,使得焊接工艺更加自动化和智能化,提高了焊接质量和效率,也减少了对焊接操作人员的依赖。焊接机器人工作站系统中的焊接工艺设计,将直接影响到焊接产品的质量和生产效率。下面将探讨焊接机器人工作站系统中焊接工艺的设计。首先,焊接机器人工作站系统需要根据焊接产品的结构特点和焊接过程的要求,设计出合适的焊接工艺。通常,焊接工艺包括填充材料的选择、电流电压参数的设置、焊接速度、焊接角度等方面。对于不同

焊接机器人控制系统的设计与开发.pdf
焊接机器人控制系统的设计与开发一、焊接机器人的背景及应用现代制造业的发展离不开自动化生产系统的应用,因为自动化生产系统可以提升产品质量、提高生产效率和降低劳动力成本。在自动化生产系统中,焊接机器人已经成为越来越重要的一部分。它可以在工作环境危险、狭小、高温等条件下完成高质量的焊接作业。焊接机器人的普及使得不少生产型企业陆续采用该技术,以应对市场挑战和产品升级。二、焊接机器人控制系统的设计焊接机器人控制系统主要有硬件和软件两部分,其中硬件部分包括机器人伺服系统、传感器、控制器、电气系统、气动系统等;软件部分