
传送装置及系统.pdf

梦影****主a


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
传送装置和传送系统.pdf
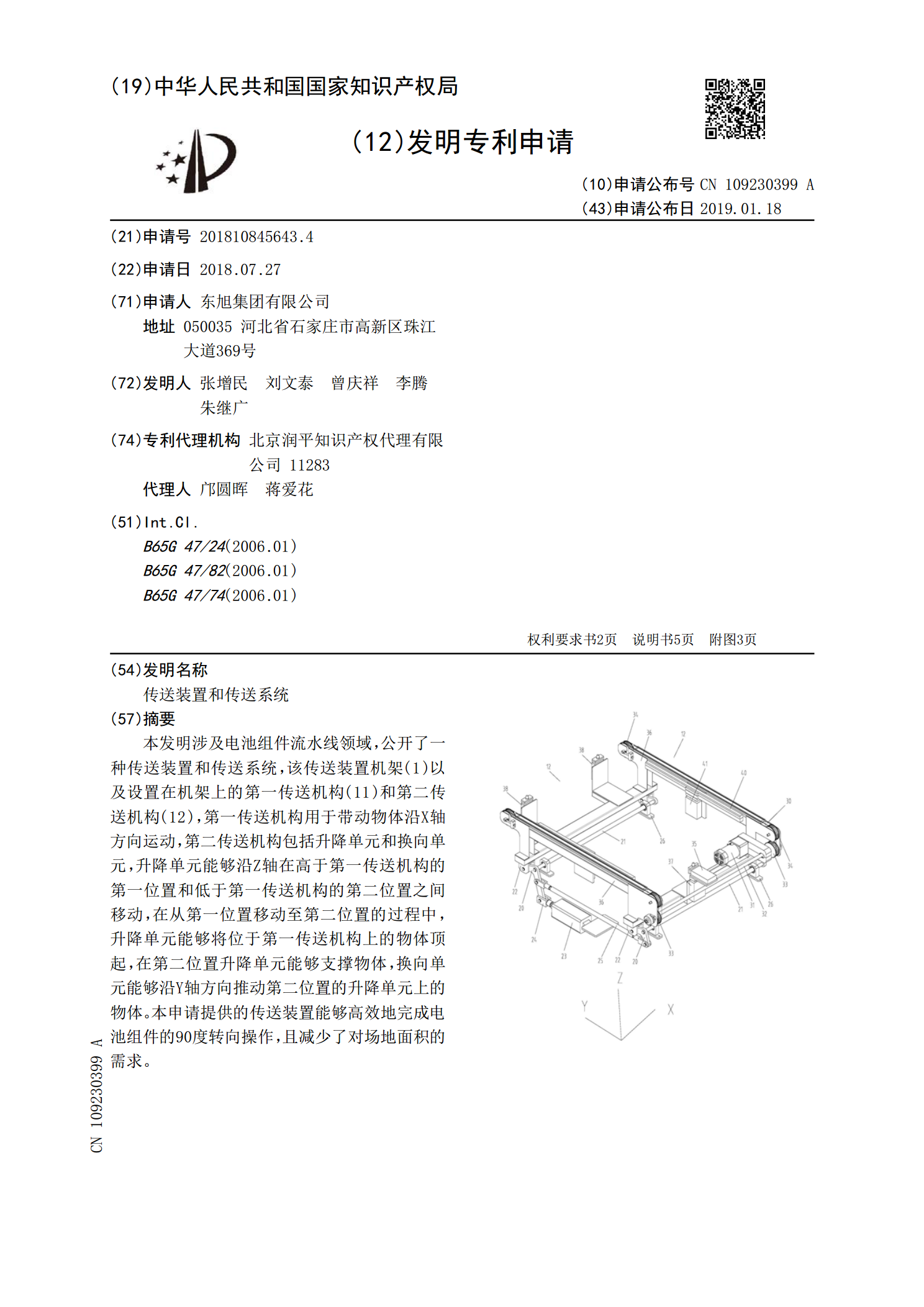
本发明涉及电池组件流水线领域,公开了一种传送装置和传送系统,该传送装置机架(1)以及设置在机架上的第一传送机构(11)和第二传送机构(12),第一传送机构用于带动物体沿X轴方向运动,第二传送机构包括升降单元和换向单元,升降单元能够沿Z轴在高于第一传送机构的第一位置和低于第一传送机构的第二位置之间移动,在从第一位置移动至第二位置的过程中,升降单元能够将位于第一传送机构上的物体顶起,在第二位置升降单元能够支撑物体,换向单元能够沿Y轴方向推动第二位置的升降单元上的物体。本申请提供的传送装置能够高效地完成电池组件

传送装置和传送系统.pdf
本发明提供一种传送装置,该传送装置包括:多个辊,其设置在传送路径上,在所述传送路径上片材沿传送方向被传送并在处理位置处受到处理,并且所述多个辊通过所述多个辊的旋转将与所述多个辊的表面进行接触的片材沿所述传送方向传送;在所述多个辊之中,第一辊设置为与所述处理位置最接近;在所述多个辊之中,第二辊设置为在相对于所述处理位置的相反侧与所述第一辊最接近;以及驱动单元,其驱动所述第一辊和所述第二辊旋转,使得至少在片材穿过所述处理位置时所述第一辊的表面速度比所述第二辊的表面速度快。
传送装置、图像形成装置以及传送系统.pdf
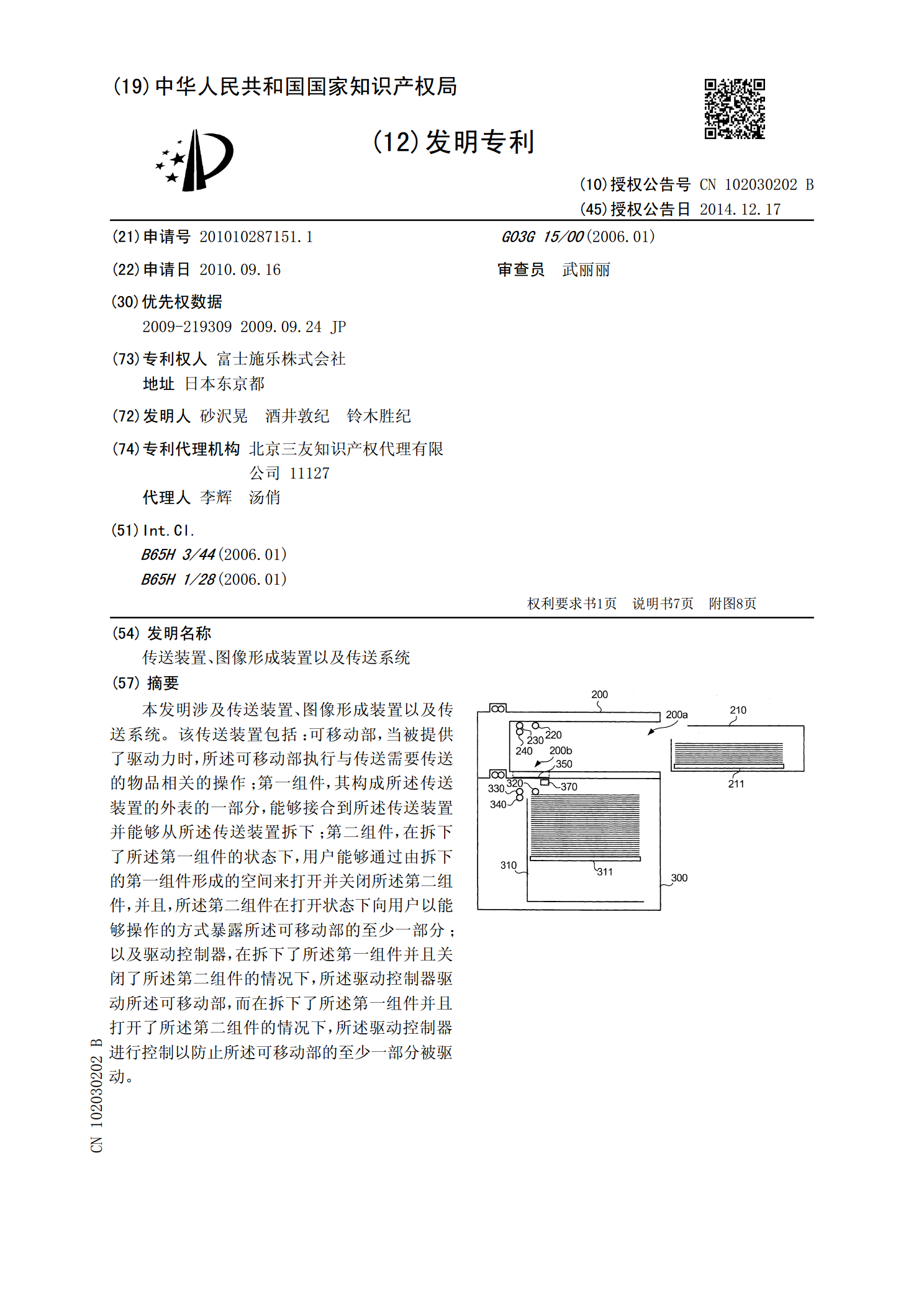
本发明涉及传送装置、图像形成装置以及传送系统。该传送装置包括:可移动部,当被提供了驱动力时,所述可移动部执行与传送需要传送的物品相关的操作;第一组件,其构成所述传送装置的外表的一部分,能够接合到所述传送装置并能够从所述传送装置拆下;第二组件,在拆下了所述第一组件的状态下,用户能够通过由拆下的第一组件形成的空间来打开并关闭所述第二组件,并且,所述第二组件在打开状态下向用户以能够操作的方式暴露所述可移动部的至少一部分;以及驱动控制器,在拆下了所述第一组件并且关闭了所述第二组件的情况下,所述驱动控制器驱动所述可

传送装置及系统.pdf
本发明提供一种传送装置及系统,其中,传送装置包括机械臂、第一驱动装置、摩擦轮和转动带;所述第一驱动装置的转动轴上固定有摩擦轮,所述摩擦轮通过与所述转动带之间的摩擦力带动所述转动带运动,所述转动带与所述机械臂固定连接。本发明通过驱动摩擦轮带动转动带运动来驱动机械臂进行往复运动,不仅使机械臂的逻辑控制优化简单,而且摩擦轮和转动带之间具有零间隙和重复性能好的特点,更容易精确地控制机械臂的位置及其运动轨迹,当机械臂在取或放晶片时,机械臂、摩擦轮、张力轮和导向轮等部件所受的外力变化不明显,使传送装置具有维护时间间隔
玻璃传送装置和玻璃传送系统.pdf
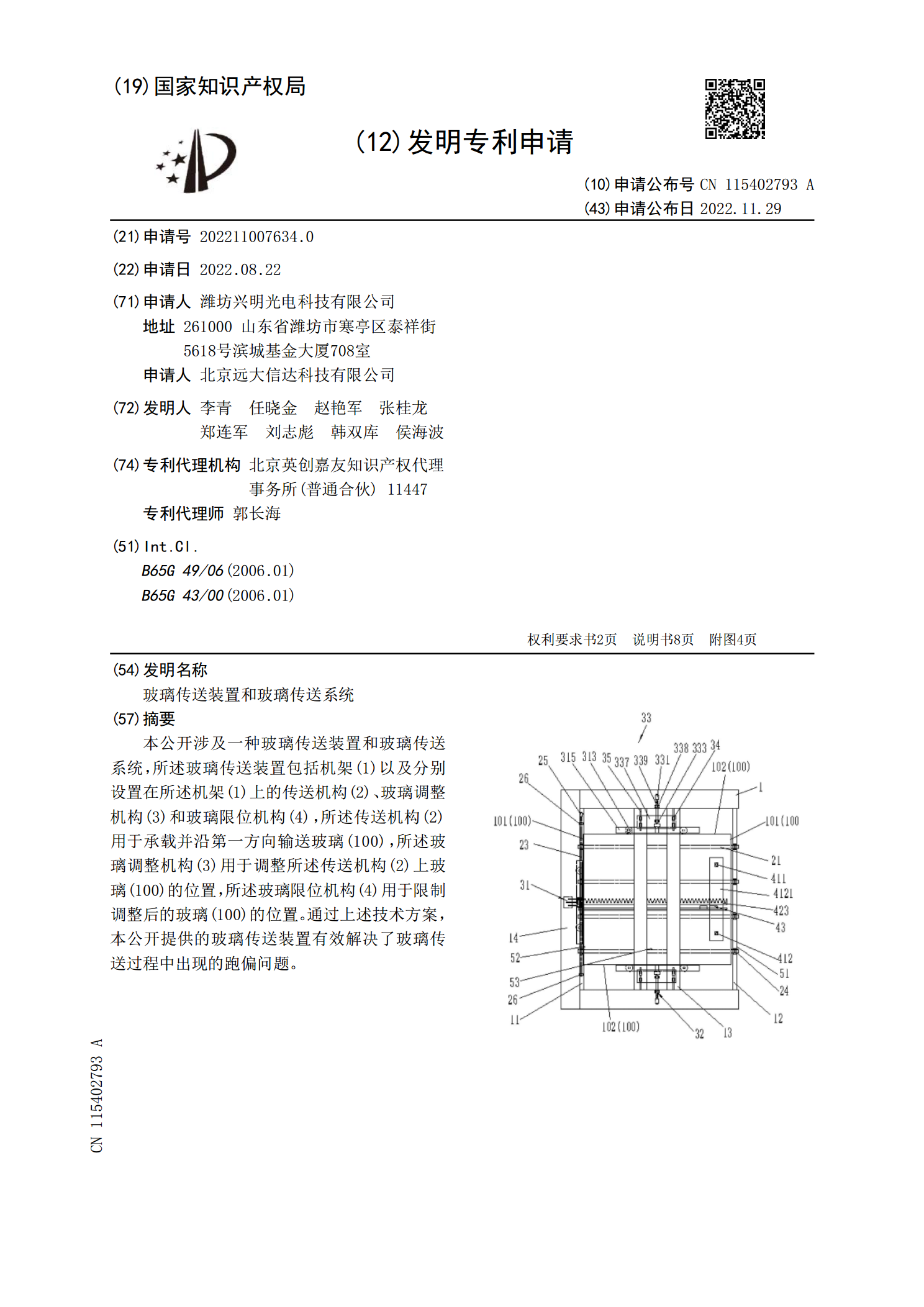
本公开涉及一种玻璃传送装置和玻璃传送系统,所述玻璃传送装置包括机架(1)以及分别设置在所述机架(1)上的传送机构(2)、玻璃调整机构(3)和玻璃限位机构(4),所述传送机构(2)用于承载并沿第一方向输送玻璃(100),所述玻璃调整机构(3)用于调整所述传送机构(2)上玻璃(100)的位置,所述玻璃限位机构(4)用于限制调整后的玻璃(100)的位置。通过上述技术方案,本公开提供的玻璃传送装置有效解决了玻璃传送过程中出现的跑偏问题。