
六自由度高速并联机构及其三自由度转动机构.pdf

Ke****67

1/9
2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
六自由度高速并联机构及其三自由度转动机构.pdf
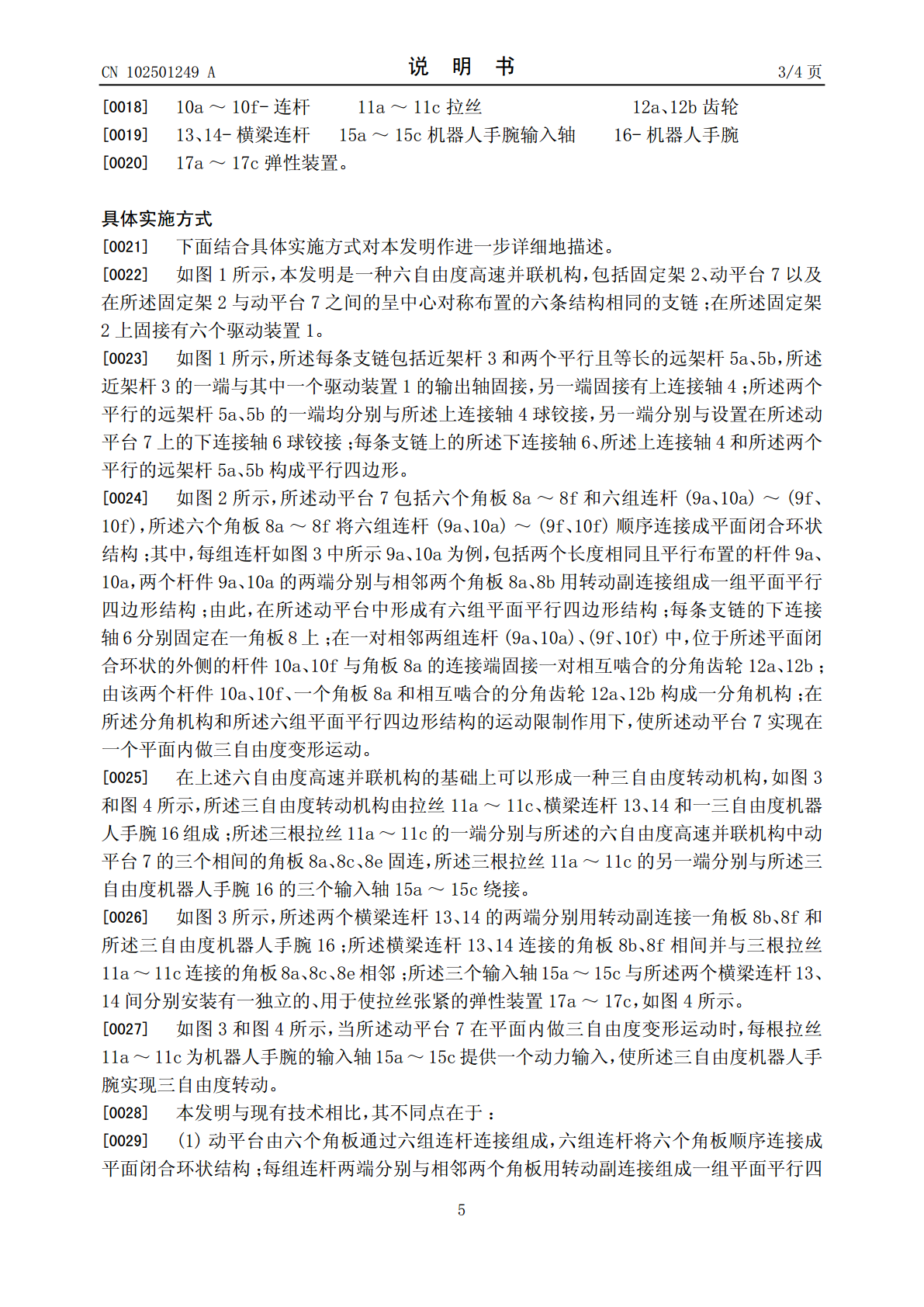
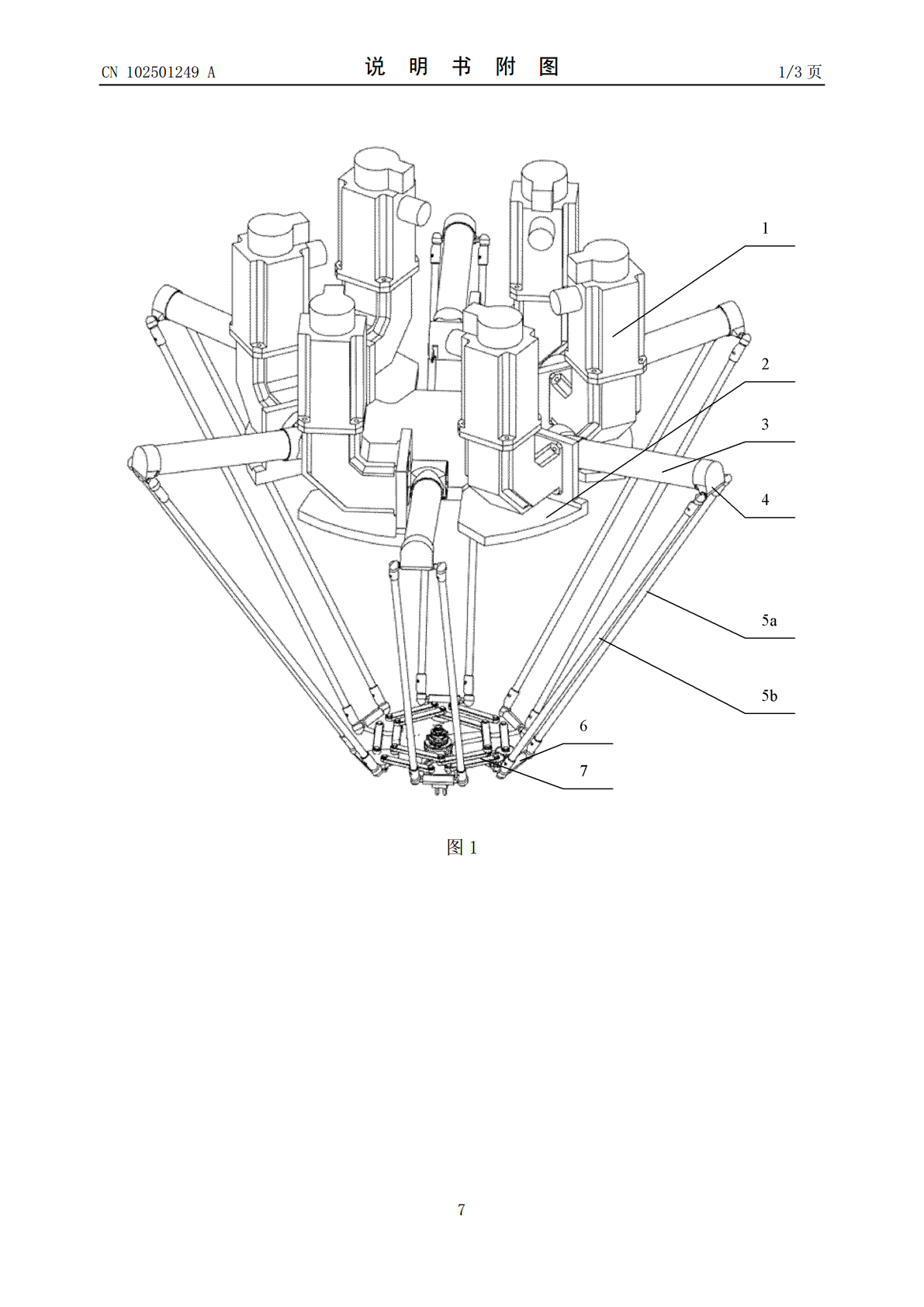
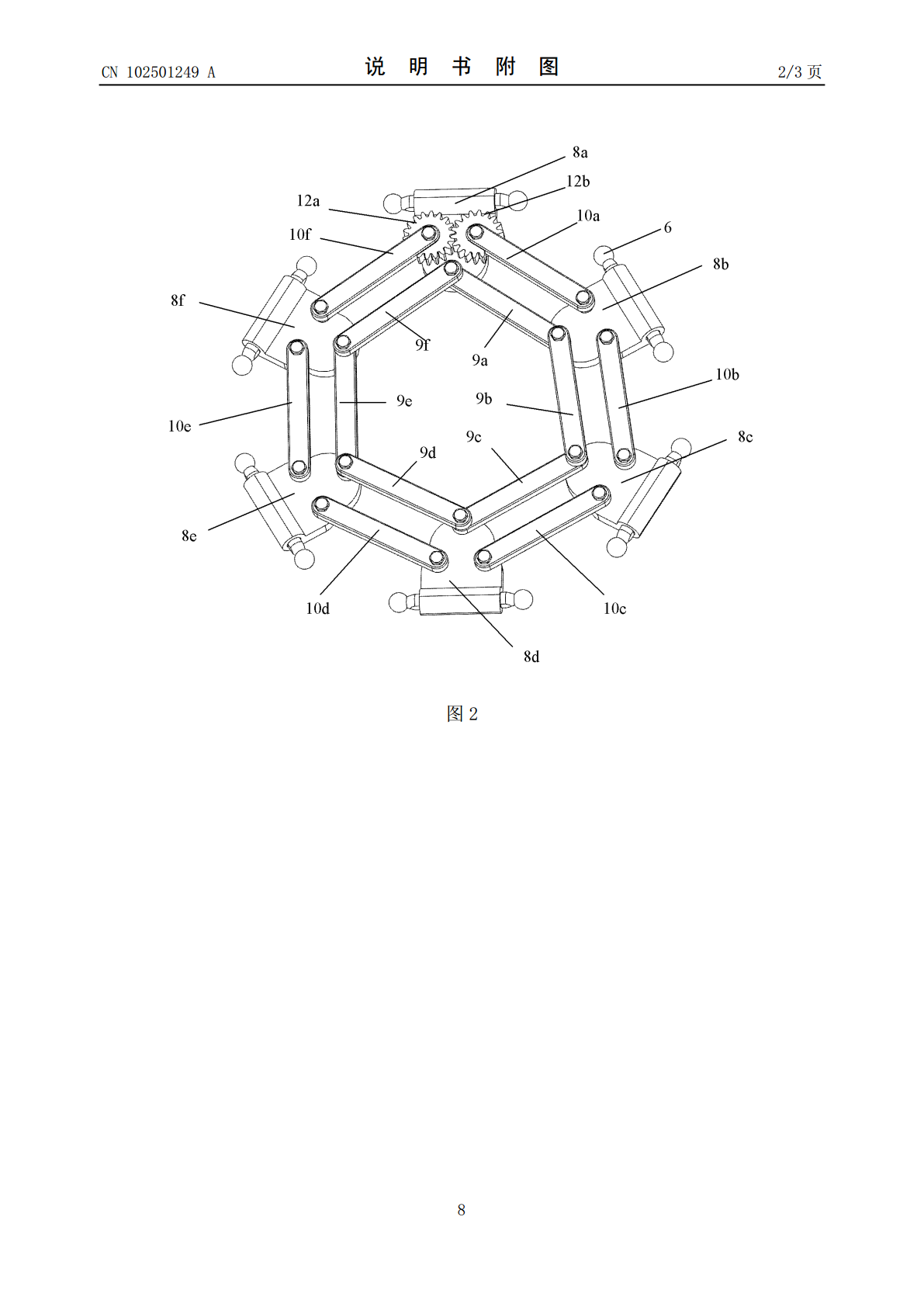
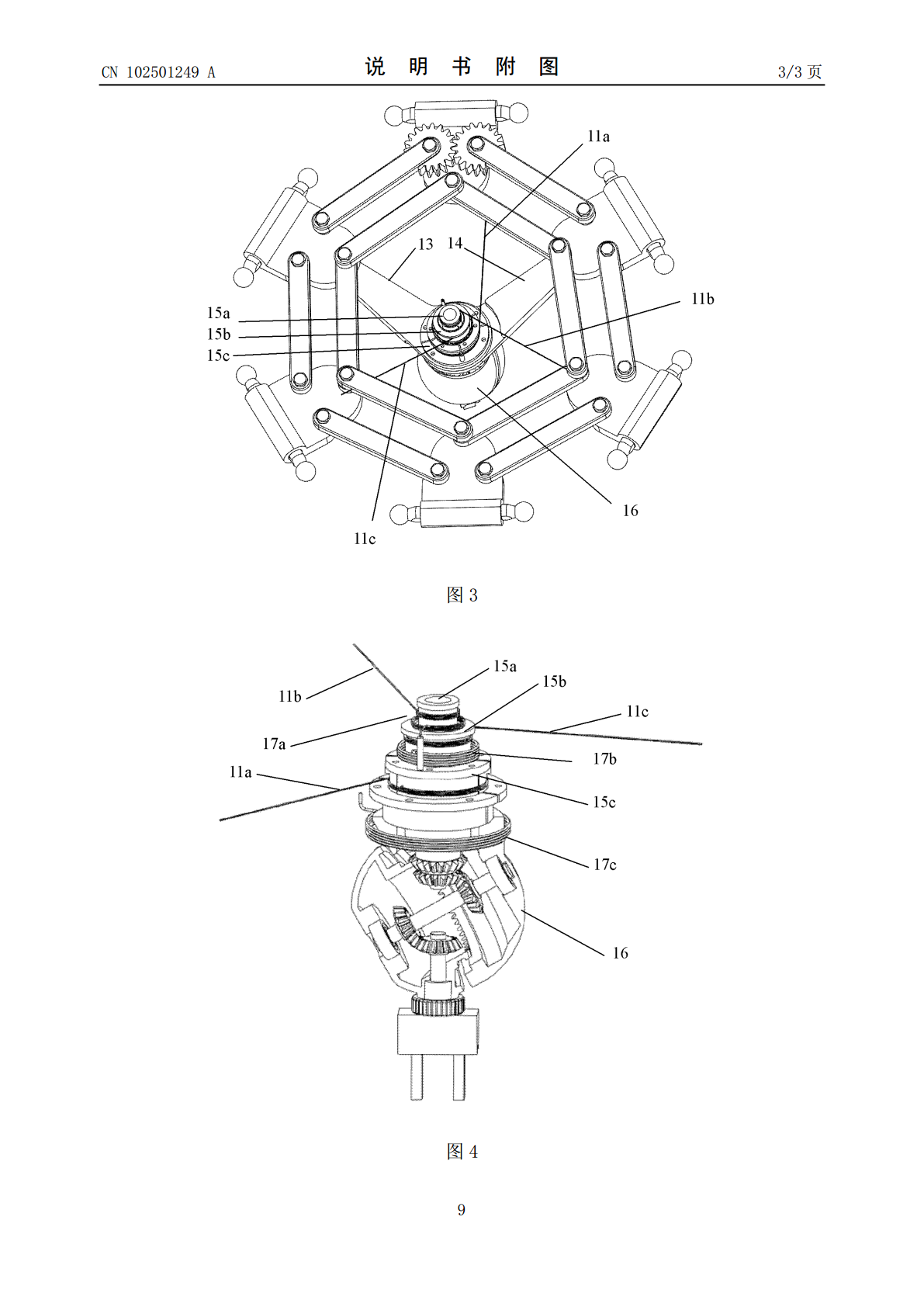
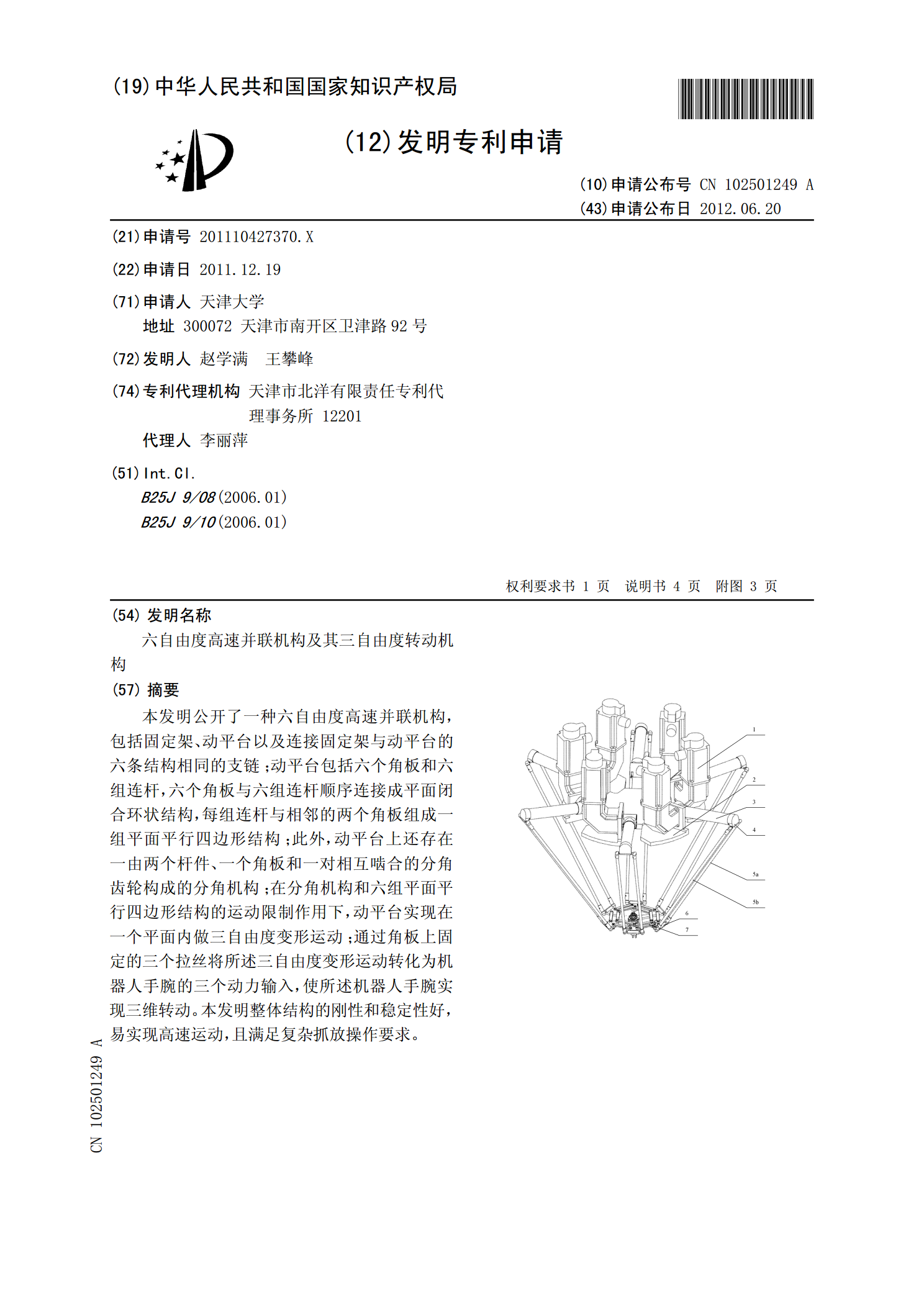
本发明公开了一种六自由度高速并联机构,包括固定架、动平台以及连接固定架与动平台的六条结构相同的支链;动平台包括六个角板和六组连杆,六个角板与六组连杆顺序连接成平面闭合环状结构,每组连杆与相邻的两个角板组成一组平面平行四边形结构;此外,动平台上还存在一由两个杆件、一个角板和一对相互啮合的分角齿轮构成的分角机构;在分角机构和六组平面平行四边形结构的运动限制作用下,动平台实现在一个平面内做三自由度变形运动;通过角板上固定的三个拉丝将所述三自由度变形运动转化为机器人手腕的三个动力输入,使所述机器人手腕实现三维转动

三自由度纯转动并联机构的工作空间分析.docx
三自由度纯转动并联机构的工作空间分析三自由度纯转动并联机构是一种机械系统,可以实现旋转运动,被广泛应用于机器人、航空航天、自动化生产等领域。本文旨在探讨三自由度纯转动并联机构的工作空间分析,希望通过本文的阐述,可以更加深入地了解这种机械系统,并为其应用提供一定的参考。三自由度纯转动并联机构是由三个轴向相互垂直的转动副组成的,通常被称为六杆机构,其中两个转动副用来约束机构的平面运动,第三个转动副用来控制机构板的转动。三自由度的机构有很多种不同的结构形式,本文将以一个经典的转臂机构为例来分析其工作空间。转臂机
二转动自由度绳索驱动式并联机构.pdf
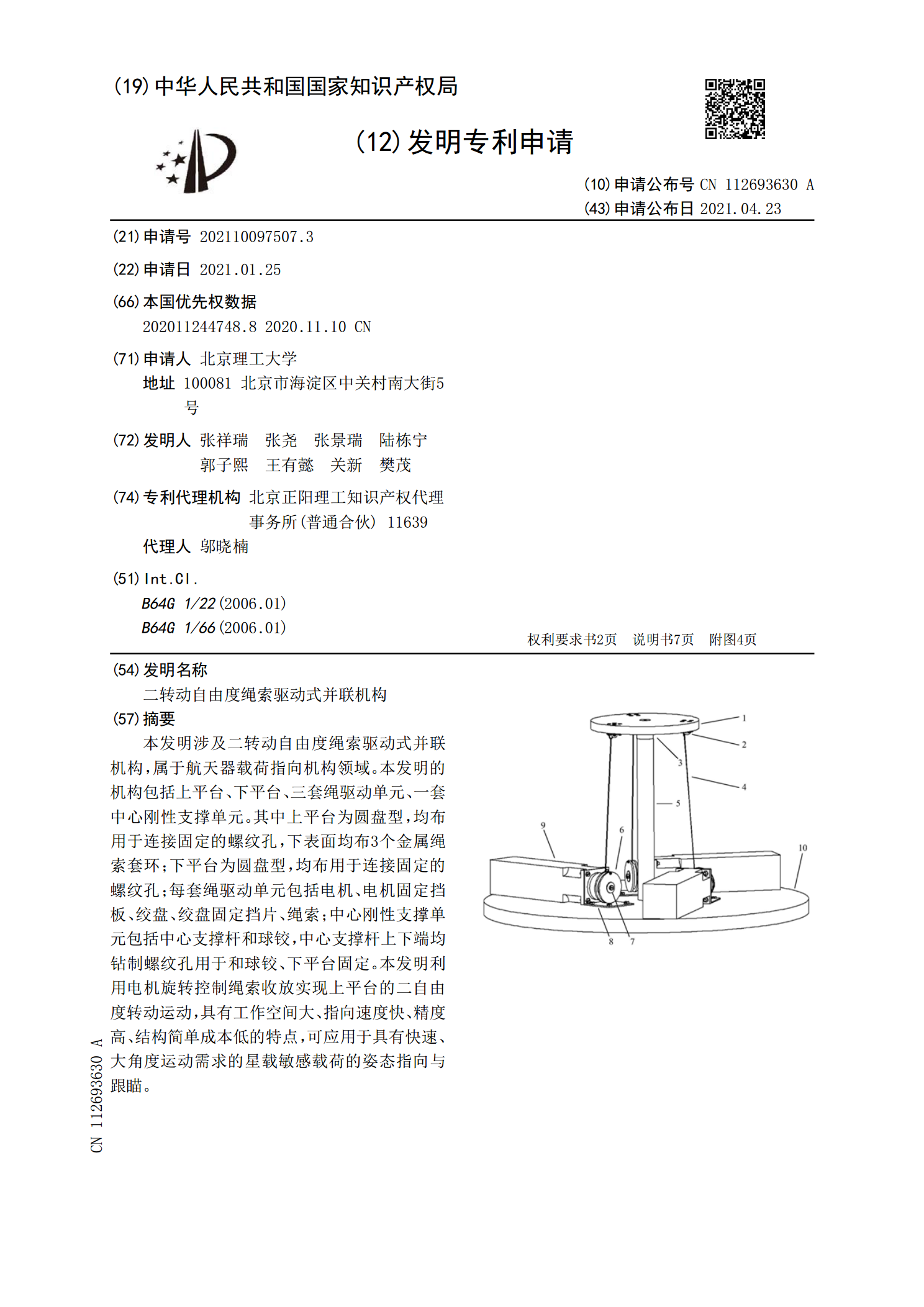
本发明涉及二转动自由度绳索驱动式并联机构,属于航天器载荷指向机构领域。本发明的机构包括上平台、下平台、三套绳驱动单元、一套中心刚性支撑单元。其中上平台为圆盘型,均布用于连接固定的螺纹孔,下表面均布3个金属绳索套环;下平台为圆盘型,均布用于连接固定的螺纹孔;每套绳驱动单元包括电机、电机固定挡板、绞盘、绞盘固定挡片、绳索;中心刚性支撑单元包括中心支撑杆和球铰,中心支撑杆上下端均钻制螺纹孔用于和球铰、下平台固定。本发明利用电机旋转控制绳索收放实现上平台的二自由度转动运动,具有工作空间大、指向速度快、精度高、结构
自由度的Delta并联机构.ppt
2024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/142024/9/14
多自由度并联机构.pdf
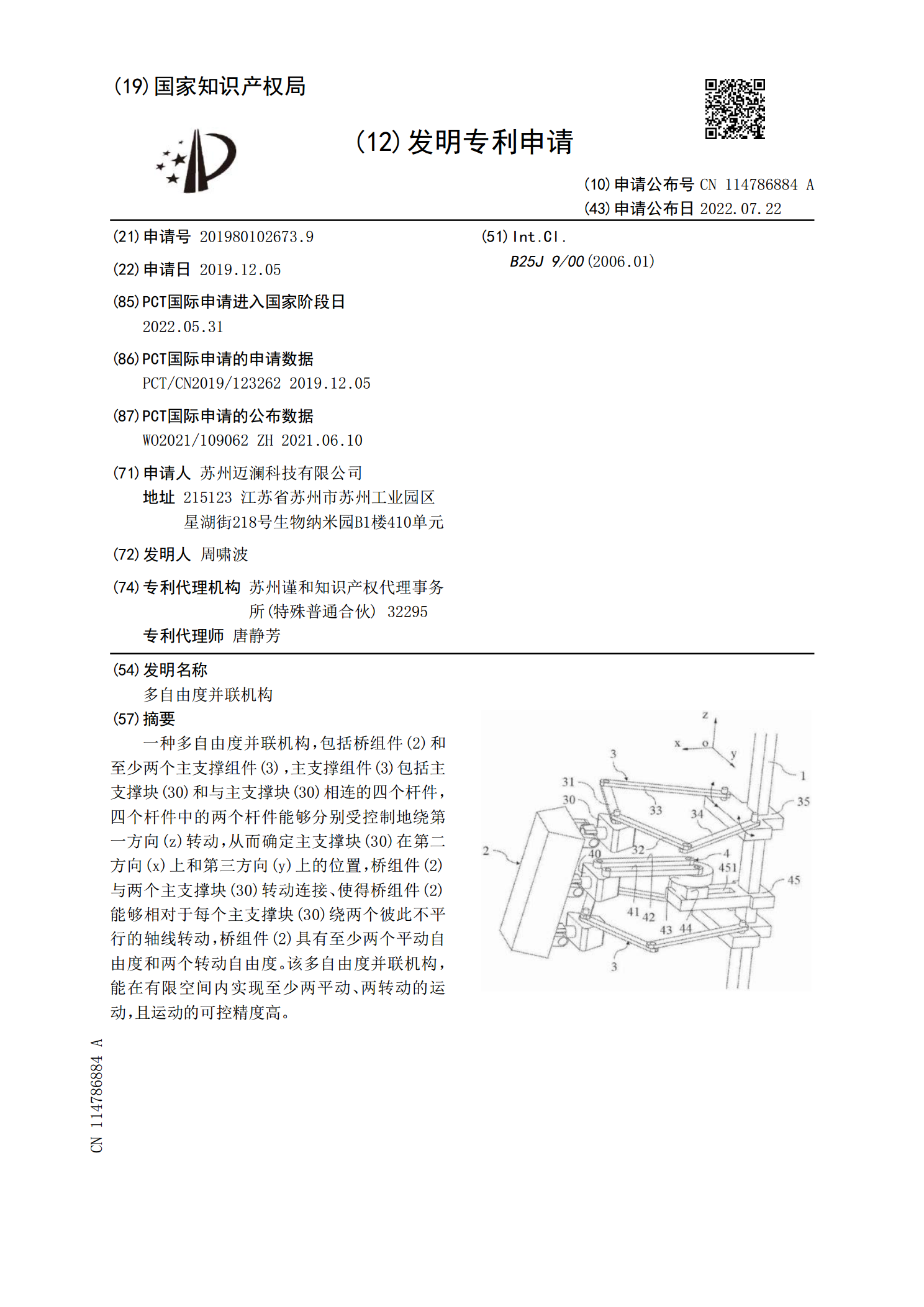
一种多自由度并联机构,包括桥组件(2)和至少两个主支撑组件(3),主支撑组件(3)包括主支撑块(30)和与主支撑块(30)相连的四个杆件,四个杆件中的两个杆件能够分别受控制地绕第一方向(z)转动,从而确定主支撑块(30)在第二方向(x)上和第三方向(y)上的位置,桥组件(2)与两个主支撑块(30)转动连接、使得桥组件(2)能够相对于每个主支撑块(30)绕两个彼此不平行的轴线转动,桥组件(2)具有至少两个平动自由度和两个转动自由度。该多自由度并联机构,能在有限空间内实现至少两平动、两转动的运动,且运动的可控