
机车转向架自动对位称重系统.pdf

光誉****君哥

1/9
2/9
3/9
4/9

5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机车转向架自动对位称重系统.pdf
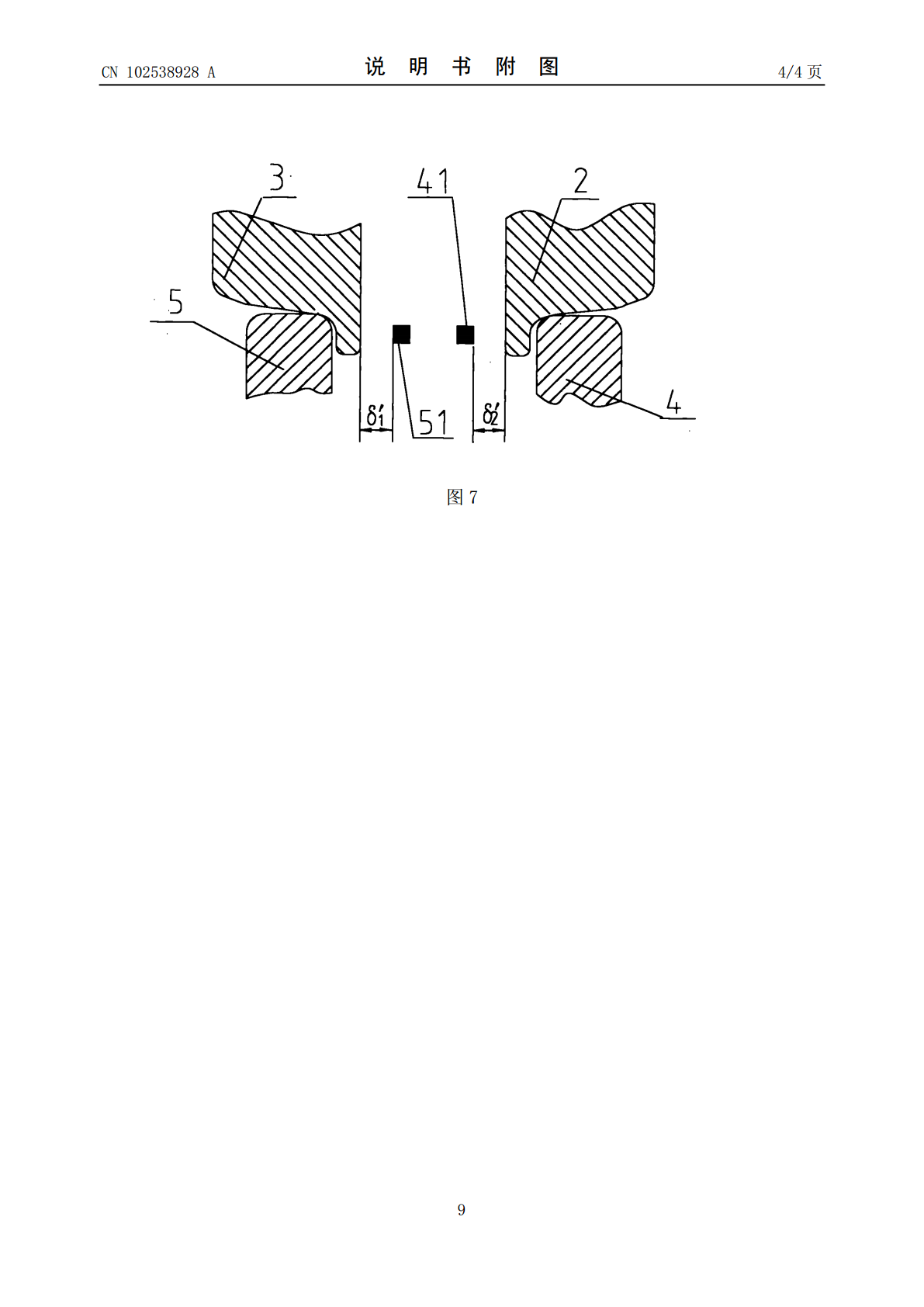
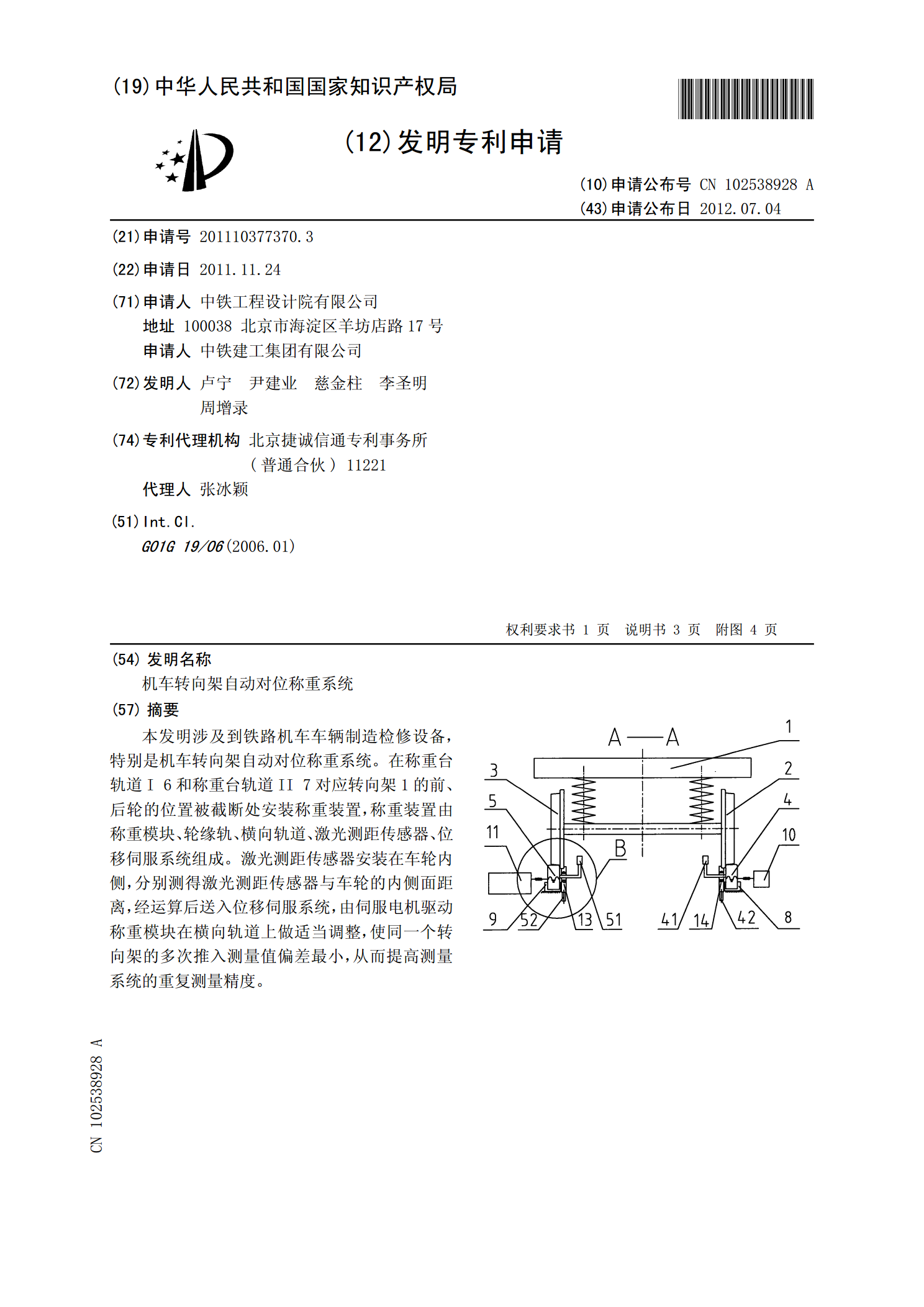
本发明涉及到铁路机车车辆制造检修设备,特别是机车转向架自动对位称重系统。在称重台轨道I?6和称重台轨道II?7对应转向架1的前、后轮的位置被截断处安装称重装置,称重装置由称重模块、轮缘轨、横向轨道、激光测距传感器、位移伺服系统组成。激光测距传感器安装在车轮内侧,分别测得激光测距传感器与车轮的内侧面距离,经运算后送入位移伺服系统,由伺服电机驱动称重模块在横向轨道上做适当调整,使同一个转向架的多次推入测量值偏差最小,从而提高测量系统的重复测量精度。

装载机车载自动称重仪系统研究.docx
装载机车载自动称重仪系统研究装载机车载自动称重仪系统研究摘要:装载机车载自动称重仪系统是一种用于测量装载机车载货物重量的装置。本文通过对装载机车载自动称重仪系统的研究,详细介绍了该系统的工作原理、结构组成和应用场景,分析了其在提高工作效率、减少测量误差和保证交通安全方面的优势。通过本文的研究,可以得出装载机车载自动称重仪系统在物流行业中的重要作用,并为相关行业的发展提供参考。关键词:装载机,自动称重仪,系统研究,工作原理,应用场景1.引言现代物流行业的发展对装载机的功能有着更高的要求,其中之一就是精确测量

CCD自动对位系统.pdf
.-CCD自动对位系统CCD自动对位系统详细介绍RV系列产品是一套专门为FA机器设计的高性能视觉实时定位系统。该系统可方便的集成到各种FA机器中,快速实现产品的智能化改造,提高产品技术性能及效率,是FA机器自动化升级的理想选择。■系统构成图.可修编-.-■高精度定位系统核采用了我公司独自开发的EI边缘识别引擎(EI-Engine),可实现亚像素级的快速高精准定位。.可修编-.-通过对定位参照点的识别计算出被测物体在XYθ方向的偏移量,并自动控制移动平台反向移动相应的移动量,纠正被测物体的位置,实现精确自动

双翌自动对位系统.ppt
我们的定位1、提供性能稳定的产品,为客户平台系统稳定运行打下基础2、提供系统集成技术支持服务,为客户平台系统快速集成我们前端系统做好技术支撑3、提供专业的咨询服务,为客户平台系统提供意见建议,供客户参考我们的产品性能平台组成与实现51.平台系统关键点----摄像机稳定性、识别率硬件系统(主控器、语音、显示屏)采用ARM、PIC等AISC主芯片严格管控所有元器件供应商渠道,确保原装正品所有半成品严格经过8小时高温老化,48小时带电老化所有成品严格经过48小时带电老化所有成品出厂前必须联机系统测试软件采用C/

视觉自动对位系统讲义.ppt
讲义要点一.视觉自动对位系统构成一.视觉自动对位系统构成二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型二.视觉自动对位系统选型三.视觉自动对位系统应用2.1曝光機2.2玻璃贴合机2.3点灯检查机2