
具有三转动一平动自由度并联定位平台.pdf

是笛****加盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

具有三转动一平动自由度并联定位平台.pdf
本发明公开了具有三转动一平动自由度并联定位平台,它包括固定架,从动支链位于固定架的中央开孔内并且通过第一铰链与固定架相连,第一至四主动支链分别通过第三至六铰链与固定架转动相连,从动支链的下端与外壳顶壁固定相连,第一至四主动支链的内管下端分别通过第七至十铰链各自与一个第二滑块相连,第二滑块与第二导轨滑动相连,第二滑块上的螺母与丝杠相连,丝杠上的齿轮与中心齿轮啮合。本结构有利于机械手提升快进能力和动态性能。

一种具有二维平动一维转动自由度的高速并联机械手.pdf
本发明公开了一种具有二维平动一维转动自由度的高速并联机械手,包括固定架、动平台及四个结构相同的运动支链,每个运动支链均包括一个近架杆和两个平行等长的远架杆,其中两个相邻运动支链的近架杆转轴上设有一对啮合的锥齿轮,从而限制动平台仅在该两运动支链的对称面内作二维平动;动平台包括一个主平台和两个副平台,两个副平台通过两组平行等长连杆分别与主平台转动连接;在主平台上转动连接一个小齿轮和两个与之啮合的齿扇,两个齿扇分别与两平行连杆固接,在驱动装置的作用下,主平台与两个副平台发生平行错动,带动平行连杆和齿扇,将运动转

具有两维平动和一维转动的三自由度机械手.pdf
本发明公开了一种具有两维平动和一维转动的三自由度机械手,由移动电机、联轴器、丝杆、摆动电机、升降电机、滑块、底座、中心轴、基座、第四同步轮、第三同步轮、空间凸轮、法兰、机械臂、吸嘴、弹簧、法兰、第二同步轮、第一同步轮、调节螺母及皮带组成;该机械手具有拾取和装载铆柱的功能,即具有两维平动和一维转动的三自由度;其中一维平动实现机械手在铆柱站之间移动,以选择不同的品种的铆柱;另一维平动是垂直运动,以便机械臂上的吸嘴实现拾取和装载铆柱的动作;一维转动使机械臂在铆柱站和旋铆头之间往返,实现铆柱的传送。

空间全对称三转动一平动并联机构.pdf
本发明公开了空间全对称三转动一平动并联机构,它包括固定架,一个从动支链位于固定架的中央并通过第一铰链与固定架能够上下移动相连,在固定架上的开孔内通过第二铰链与主动支链相连,从动支链的下端通过第三铰链与壳体顶壁固定相连,四个主动支链外壁下端分别通过第四铰链各自与一个第二滑块相连,第二滑块与第二导轨上下滑动相连,在第二滑块的底部各自固定连接有一个螺母,螺母二丝杠一端螺纹相连,在每一个丝杠上分别连接有一个齿轮,在四个齿轮的中间设置有一个与所述的四个齿轮能够分别啮合配合的中心齿轮,在中心齿轮的齿轮轴下端固定连接有
一种新型三自由度平动并联机构.pdf
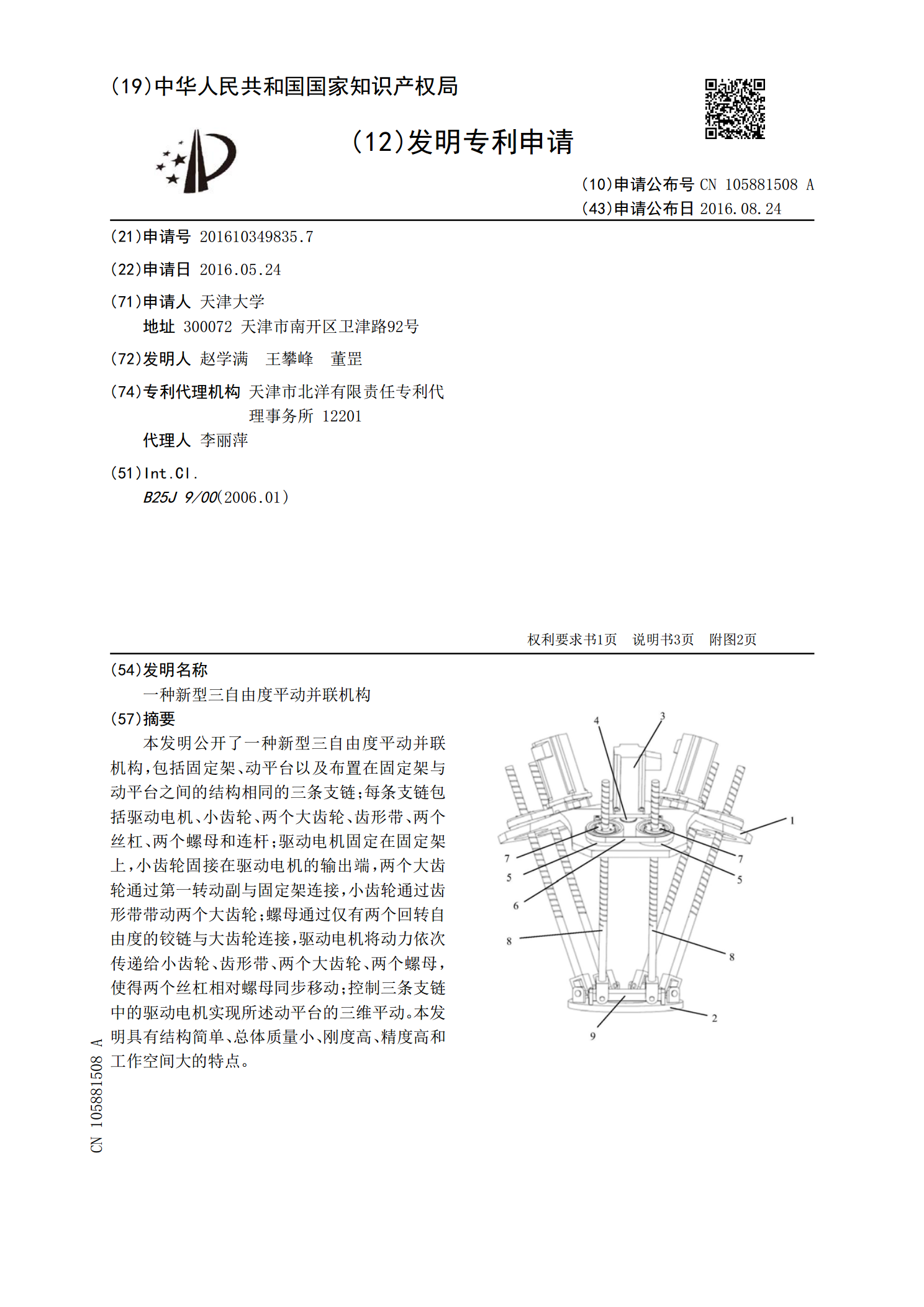
本发明公开了一种新型三自由度平动并联机构,包括固定架、动平台以及布置在固定架与动平台之间的结构相同的三条支链;每条支链包括驱动电机、小齿轮、两个大齿轮、齿形带、两个丝杠、两个螺母和连杆;驱动电机固定在固定架上,小齿轮固接在驱动电机的输出端,两个大齿轮通过第一转动副与固定架连接,小齿轮通过齿形带带动两个大齿轮;螺母通过仅有两个回转自由度的铰链与大齿轮连接,驱动电机将动力依次传递给小齿轮、齿形带、两个大齿轮、两个螺母,使得两个丝杠相对螺母同步移动;控制三条支链中的驱动电机实现所述动平台的三维平动。本发明具有结