
一种移动式隧道自动水平定位检测臂.pdf

佳晨****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种移动式隧道自动水平定位检测臂.pdf
本发明涉及隧道工程机械,特别涉及隧道自动水平定位检测臂。它由检测仪器、保护架、阻尼臂、刚性伸缩臂、罩壳、横向旋转驱动机构、高度升高控制架、水平目标定位控制架及动力驱动源组成其特征在于:所述的保护架是由4组三角轮、保护壳及连接架组成,以及阻尼臂、横向旋转驱动机构、刚性伸缩臂、高度升高控制架、保证三角轮贴在隧道衬砌面上,使得雷达天线在横向及纵向面始终与隧道衬砌面保持在同一面上,本发明的优点在于,可装在汽车或其它的行走机构,能适应不同的路面,更重要的是它可以在正在施工的路面上对隧道衬砌面进行检测,保证检测质量的

一种可移动式隧道检测臂.pdf
本发明涉及隧道工程机械,特别涉及可移动式隧道检测臂。它由滚轮、雷达托架、二位阻尼方向节、可控伸缩刚性杆、丝杆、丝杆驱动装置、阻尼方向节、横向旋转驱动装置、纵向旋转驱动装置、雷达天线组成,优点在于,结构简单,全自动或遥控操作,使得雷达天线在横向及纵向面始终与隧道衬砌面保持在同一面上,这样保证了雷达天线对隧道衬砌面的检测质量的稳定及提高检测质量。
一种隧道专用臂.pdf
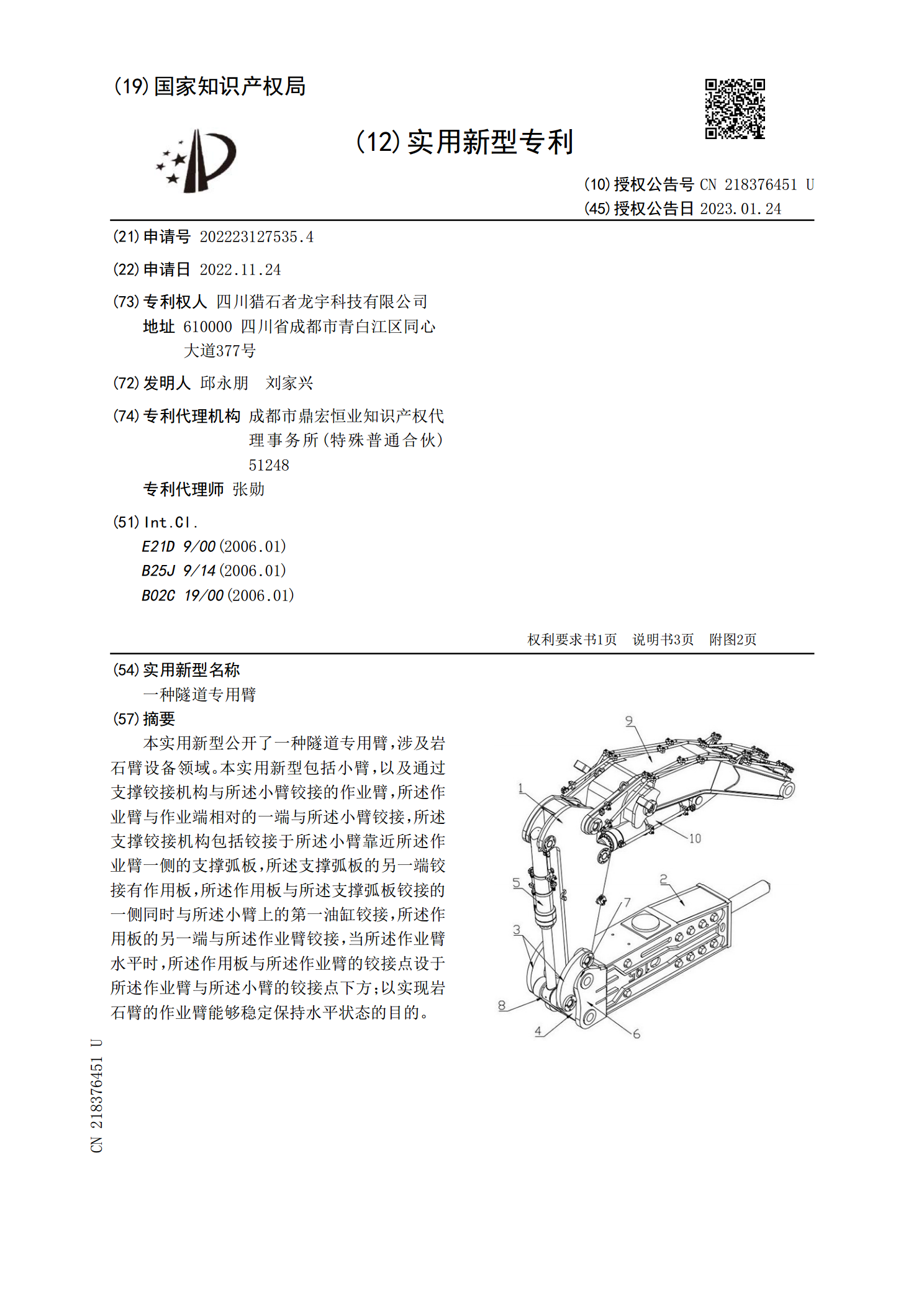
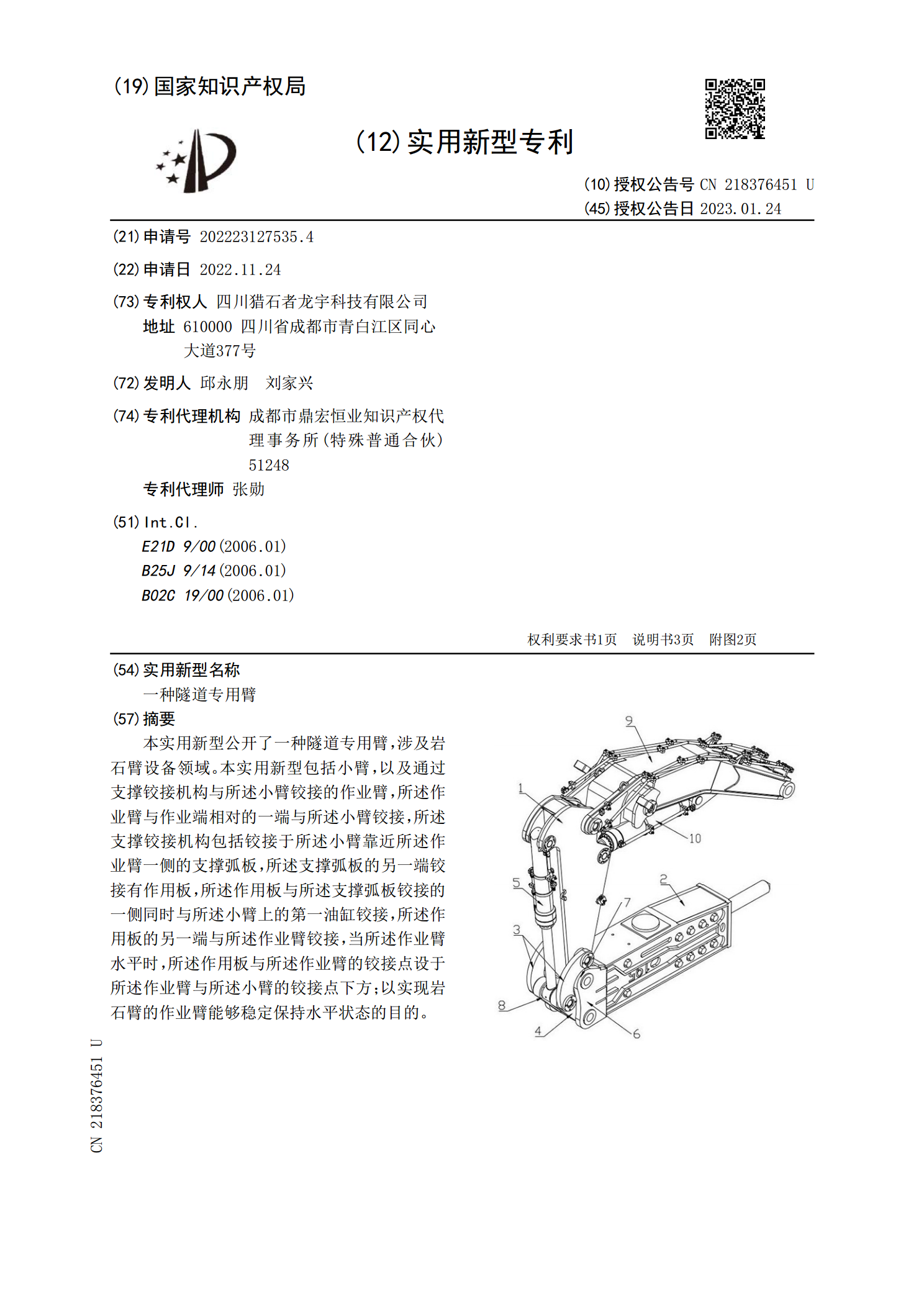
本实用新型公开了一种隧道专用臂,涉及岩石臂设备领域。本实用新型包括小臂,以及通过支撑铰接机构与所述小臂铰接的作业臂,所述作业臂与作业端相对的一端与所述小臂铰接,所述支撑铰接机构包括铰接于所述小臂靠近所述作业臂一侧的支撑弧板,所述支撑弧板的另一端铰接有作用板,所述作用板与所述支撑弧板铰接的一侧同时与所述小臂上的第一油缸铰接,所述作用板的另一端与所述作业臂铰接,当所述作业臂水平时,所述作用板与所述作业臂的铰接点设于所述作业臂与所述小臂的铰接点下方;以实现岩石臂的作业臂能够稳定保持水平状态的目的。
一种隧道专用臂.pdf
本实用新型公开了一种隧道专用臂,涉及岩石臂设备领域。本实用新型包括小臂,以及通过支撑铰接机构与所述小臂铰接的作业臂,所述作业臂与作业端相对的一端与所述小臂铰接,所述支撑铰接机构包括铰接于所述小臂靠近所述作业臂一侧的支撑弧板,所述支撑弧板的另一端铰接有作用板,所述作用板与所述支撑弧板铰接的一侧同时与所述小臂上的第一油缸铰接,所述作用板的另一端与所述作业臂铰接,当所述作业臂水平时,所述作用板与所述作业臂的铰接点设于所述作业臂与所述小臂的铰接点下方;以实现岩石臂的作业臂能够稳定保持水平状态的目的。

一种新型可自动定位锁死的手动调整臂.pdf
一种新型可自动定位锁死的手动调整臂,包括壳体、装设于壳体内的蜗轮、与蜗轮啮合的蜗杆、以及调整轴,壳体上对应开设有与蜗杆内孔相贯通的上安装孔及下安装孔,下安装孔内设有一弹性复位装置,位于上安装孔内的调整轴设有一台阶圆柱体,该台阶圆柱体外圆圆周上开设有复数个上端具有开口的齿槽,壳体上至少扩有一与上安装孔相通且与齿槽对应的径向通孔,径向通孔内固定一末端卡入或退出齿槽的定位轴。本结构调整臂的定位轴末端卡入齿槽中,调整轴无法径向转动,达到防松定位的目的;调整时只需将调整轴推进使定位轴脱离齿槽,即可进行刹车间隙调整,