
移动终端的非接触式控制装置及其控制方法.pdf

Ja****20


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动终端的非接触式控制装置及其控制方法.pdf
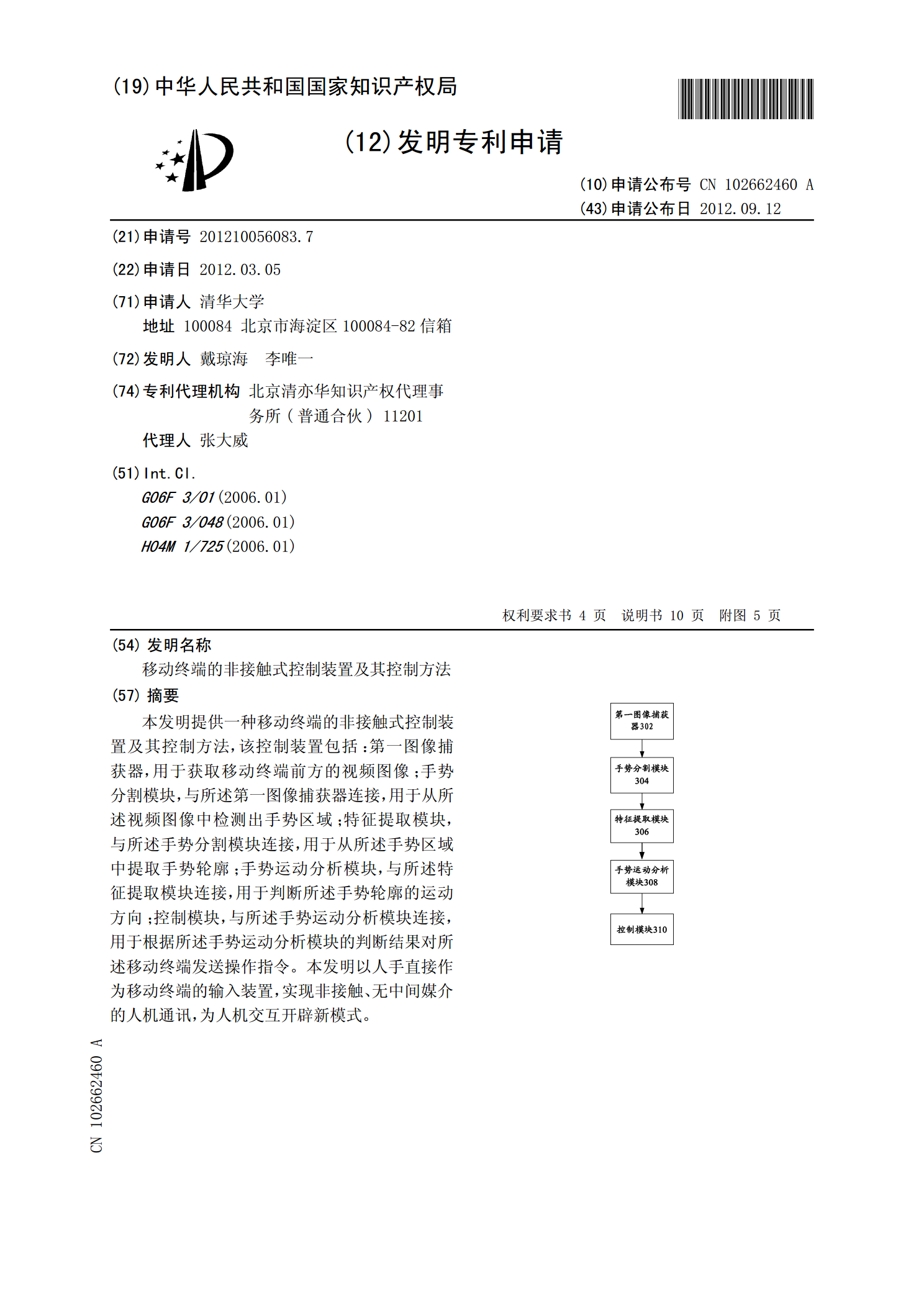
本发明提供一种移动终端的非接触式控制装置及其控制方法,该控制装置包括:第一图像捕获器,用于获取移动终端前方的视频图像;手势分割模块,与所述第一图像捕获器连接,用于从所述视频图像中检测出手势区域;特征提取模块,与所述手势分割模块连接,用于从所述手势区域中提取手势轮廓;手势运动分析模块,与所述特征提取模块连接,用于判断所述手势轮廓的运动方向;控制模块,与所述手势运动分析模块连接,用于根据所述手势运动分析模块的判断结果对所述移动终端发送操作指令。本发明以人手直接作为移动终端的输入装置,实现非接触、无中间媒介的人

手表式移动终端及其控制方法.pdf
本发明涉及一种以在支付时使用的支付卡、优惠券、会员卡等等可以被方便地搜索到的这样的方式控制的手表式移动终端,和控制该移动终端的方法。为了实现上述或其他目的,根据本发明的一个方面,提供一种手表式移动终端,该手表式移动终端包括:显示单元;感测单元;以及控制单元,其中,控制单元感测针对在显示单元上输出的支付信息的第一输入信号,该第一输入信号是触摸输入,其中,在显示单元处感测到的面积和压力中的至少一个超过预定值;根据第一输入信号,在被包括在支付信息中的预定项目上显示指示器;并且根据第二输入信号放大并输出预定项目。

移动终端控制方法、装置及移动终端.pdf
本发明提供一种移动终端控制方法,涉及通信技术领域,包括:响应于当前剩余电量低于当前时刻至预设闹钟时刻的时间段在当前工作模式下所需的电量,获取所述当前剩余电量在各预设工作模式下对应的待机时长;判断各预设工作模式下对应的待机时长是否大于当前时刻与预设闹钟时刻之间的时间差;响应于判断出存在待机时长大于所述时间差的预设工作模式,从所有待机时长大于所述时间差的预设工作模式中确定一个预设工作模式作为目标工作模式;将移动终端的工作模式从当前工作模式切换为所述目标工作模式。本发明还提供一种移动终端控制装置和移动终端。

移动终端天线及其控制方法和装置.pdf
本公开提供一种移动终端天线及其控制方法和装置,涉及天线技术领域。包括移动终端的第一金属边框,第一金属边框与移动终端的第二金属边框和第三金属边框之间分别留有第一缝隙和第二缝隙,第二金属边框和第三金属边框的长度大于第一金属边框的长度,且位于第一金属边框的同侧并分别与第一金属边框垂直;第一金属边框上设置有连接有第一开关的第一接线点和连接有第二开关的第二接线点,第一和第二开关用于将第一和第二接线点与移动终端主板上的接地点或者收发端可切换地连接,以将第一接线点和第二接线点切换作为移动终端天线的地点或者馈电点。本公开

一种非接触式血样采集装置及其控制方法.pdf
本发明提供一种非接触式血样采集装置,包括:支撑板,其水平设置;支撑架,其竖直设置在支撑板上,且能够沿支撑板轴向运动;水平导轨,其水平垂直设置在支撑架上,且能够沿支撑架轴向运动;连接架,其可滑动设置在水平导轨上;采血架,其可旋转设置在连接架上;穿刺臂,其可旋转设置在远离水平导轨的采血架一端;穿刺动力机构,其固定设置在穿刺臂上;采血针夹持装置,其固定设置在穿刺动力机构的输出端,用于夹持采血针;辅助臂,其可旋转设置在靠近水平导轨的采血架一端;第一辅助动力机构,其固定设置在辅助臂上;第二辅助动力机构,其固定设置在