
粒子滤波算法综述.ppt

YY****。。

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

粒子滤波算法综述.ppt
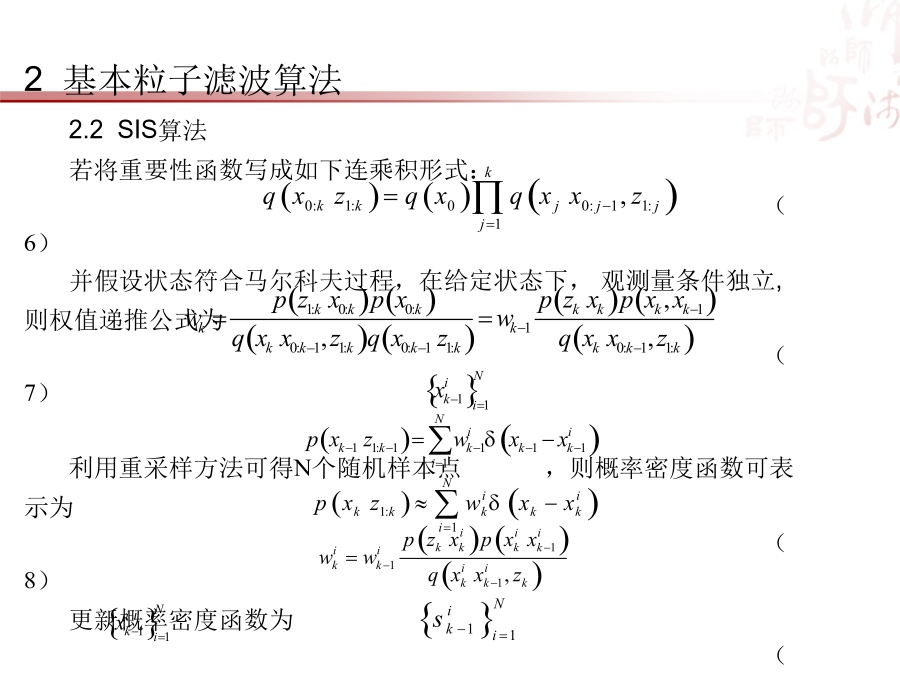
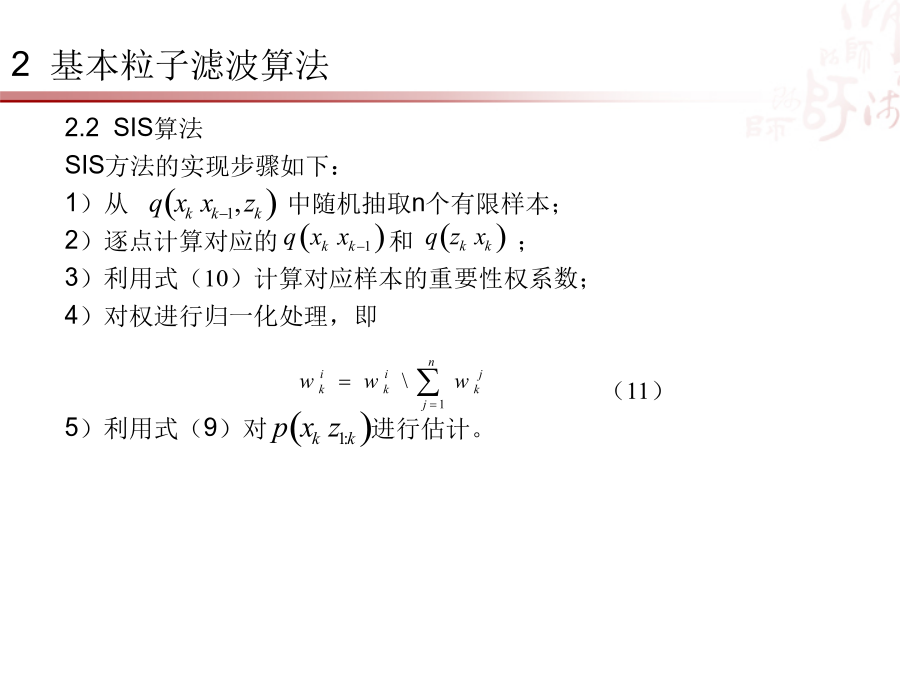
粒子滤波算法综述1引言2基本粒子滤波算法2基本粒子滤波算法2基本粒子滤波算法2基本粒子滤波算法3粒子滤波算法存在的主要问题3.1重要性函数选择选取重要性函数的准则是使重要性权重的方差最小。Liu等证明了最优重要性函数为但采用最优重要性函数需要从采样并计算积分。从应用角度看,多数重要性函数都采用次优算法容易实现的。次优算法为。3.2重采样重采样算法是降低粒子匮乏现象的另一种方法,其思想是通过对粒子和相应权表示的概率密度函数重新采样,加权值较大的粒子数。最常用的重采样方法是随机采样方法。随机采样的过程是:首先

粒子滤波算法综述.pptx

粒子滤波算法综述学习教案.pptx
会计学1引言2基本粒子滤波算法2基本粒子滤波算法2基本粒子滤波算法2基本粒子滤波算法3粒子滤波算法存在的主要问题3.1重要性函数选择选取重要性函数的准则是使重要性权重的方差最小。Liu等证明了最优重要性函数为但采用最优重要性函数需要从采样并计算积分。从应用角度看,多数重要性函数都采用次优算法容易实现的。次优算法为。3.2重采样重采样算法是降低粒子匮乏现象的另一种方法,其思想是通过对粒子和相应权表示的概率密度函数重新采样,加权值较大的粒子数。最常用的重采样方法是随机采样方法。随机采样的过程是:首先产生n个在

粒子滤波跟踪算法研究的综述报告.docx
粒子滤波跟踪算法研究的综述报告随着计算机科学技术的不断发展,粒子滤波跟踪算法被越来越多地应用于图像处理、目标追踪、机器人定位等领域。本文旨在对粒子滤波跟踪算法作出全面的综述,包括算法原理、应用场景、优点和不足等方面的内容。一、算法原理粒子滤波跟踪算法是一种基于概率推断的非线性动态系统状态估计算法。其算法流程主要可分为两个部分:状态预测和状态更新。1.状态预测状态预测是根据系统动态方程(如机器人的运动模型)和当前状态,通过模拟样本进行预测。具体而言,首先从先前测量数据(如传感器数据)中推断出当前状态,之后通

智能优化粒子滤波算法综述研究.docx
智能优化粒子滤波算法综述研究智能优化粒子滤波算法综述研究摘要:粒子滤波算法是一种基于蒙特卡洛方法的贝叶斯滤波算法,广泛应用于目标跟踪、定位等领域。然而,传统的粒子滤波算法在高维状态空间、大样本量等情况下存在着粒子退化、采样效率低等问题。为了解决这些问题,研究者们提出了基于智能优化的粒子滤波算法,通过引入进化算法、神经网络等方法,提高了粒子滤波的采样效率和性能。本文对智能优化粒子滤波算法的研究进行了综述,分析了不同算法的特点及应用情况,并展望了未来的研究方向。关键词:粒子滤波;智能优化算法;采样效率;粒子退