
一种水果自动分拣输送装置.pdf

努力****恨风


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种水果自动分拣输送装置.pdf
一种水果自动分拣输送装置,是由支架、筛板I、筛板II、连杆、机械手、传送带、连杆电机、机械手电机、传送带电机、带轮、压力传感器、图像辨别传感器、吸盘、控制箱组成的,其特征是:连杆电机安装在支架内,连杆与连杆电机连接,筛板I和筛板II通过连杆与支架连接,机械手安装在支架一侧,机械手上安装机械手电机、吸盘和图像辨别传感器,在筛板II下方安装带轮和传送带,带轮与传送带电机连接,传送带上附有压力传感器,控制箱安装在支架上。该装置可以完成水果品质好坏的辨别和体积大小的分类并可进行自动输送,实现了水果的自动化分拣和输
一种水果自动分拣装置.pdf
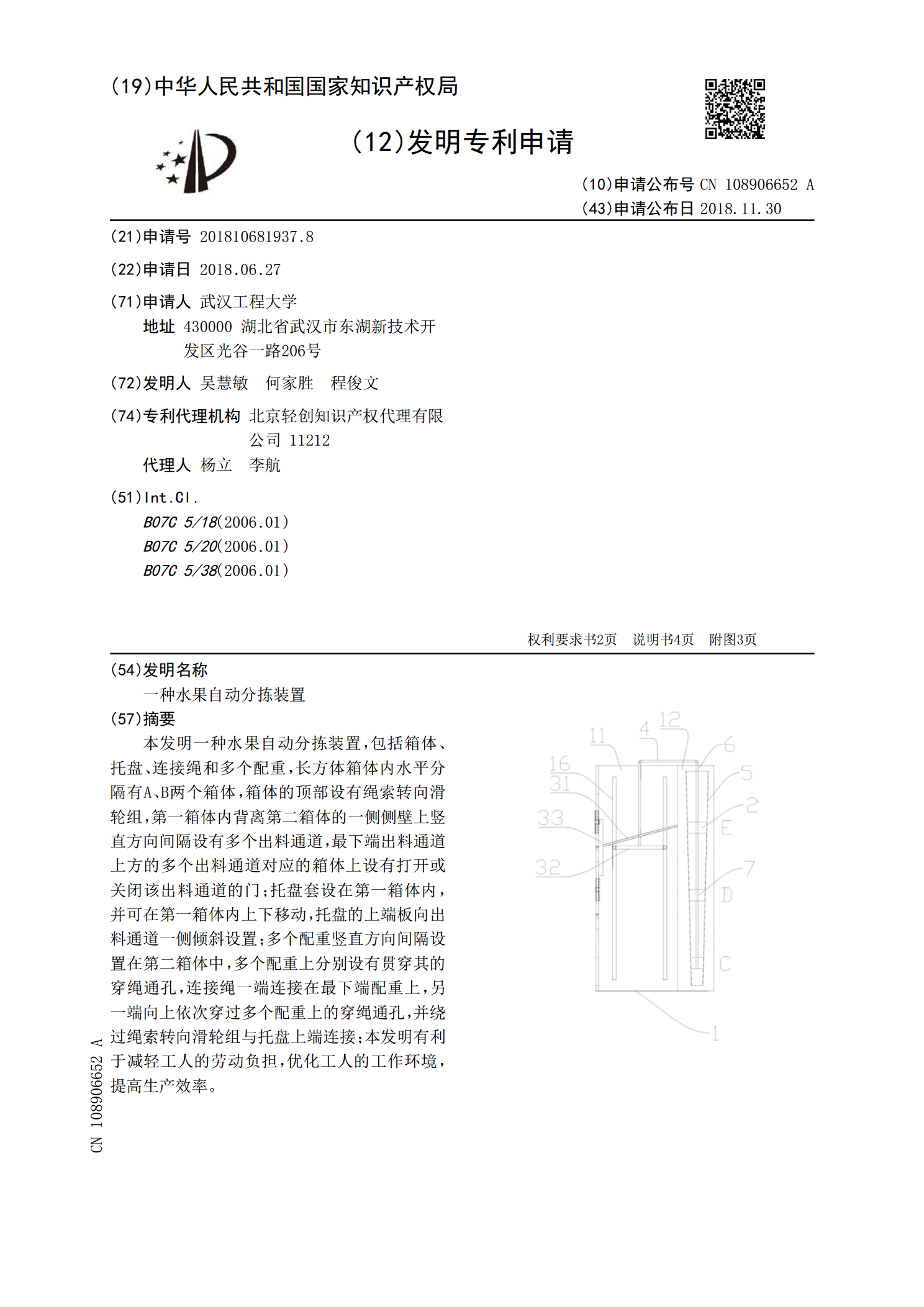
本发明一种水果自动分拣装置,包括箱体、托盘、连接绳和多个配重,长方体箱体内水平分隔有A、B两个箱体,箱体的顶部设有绳索转向滑轮组,第一箱体内背离第二箱体的一侧侧壁上竖直方向间隔设有多个出料通道,最下端出料通道上方的多个出料通道对应的箱体上设有打开或关闭该出料通道的门;托盘套设在第一箱体内,并可在第一箱体内上下移动,托盘的上端板向出料通道一侧倾斜设置;多个配重竖直方向间隔设置在第二箱体中,多个配重上分别设有贯穿其的穿绳通孔,连接绳一端连接在最下端配重上,另一端向上依次穿过多个配重上的穿绳通孔,并绕过绳索转向

一种自动水果分拣装置.pdf
本实用新型涉及分拣设备技术领域,具体为一种自动水果分拣装置。本实用新型,包括支撑架,所述支撑架的上表面安装有传送杆,所述支撑架的上表面安装有检测器,所述支撑架的表面固定连接有若干个盒体,所述支撑架的内壁固定连接有出料板,所述支撑架的表面设有收集装置,所述收集装置包括两个固定板,两个所述固定板均与支撑架的表面固定连接,所述固定板的表面转动连接有转块,所述转块的一端固定连接有支撑框,所述支撑框的表面套有收集袋,所述转块的表面滑动连接有插销,所述固定板的表面开设有两个孔洞,所述插销与固定板表面孔洞相卡接,所述支

一种服装自动分拣输送装置.pdf
一种服装自动分拣输送装置,属于服装加工辅助设备技术领域,结构上依次由上架机构、导向机构和下架机构组成;生产车间的服装连同衣架从上架杆的尾部置入,由于上架杆与主导轨带有倾斜的角度,通过第一气缸和第二气缸的交替启闭,使气缸既可满足衣架的拦截,又可满足衣架的放行,使衣服依次有序的进入到主导轨下方的挂架上;通过导向机构导向,使标签过渡板能够正对读卡器,可有效识别服装上的电子标签,杜绝了漏读缺陷,为后续工序提供了基础;而下架机构则通过前期的读卡识别后控制下架气缸发生动作,可使服装直接进入到与当前下架杆相连的仓储车间
一种用于自动分拣系统的输送装置.pdf
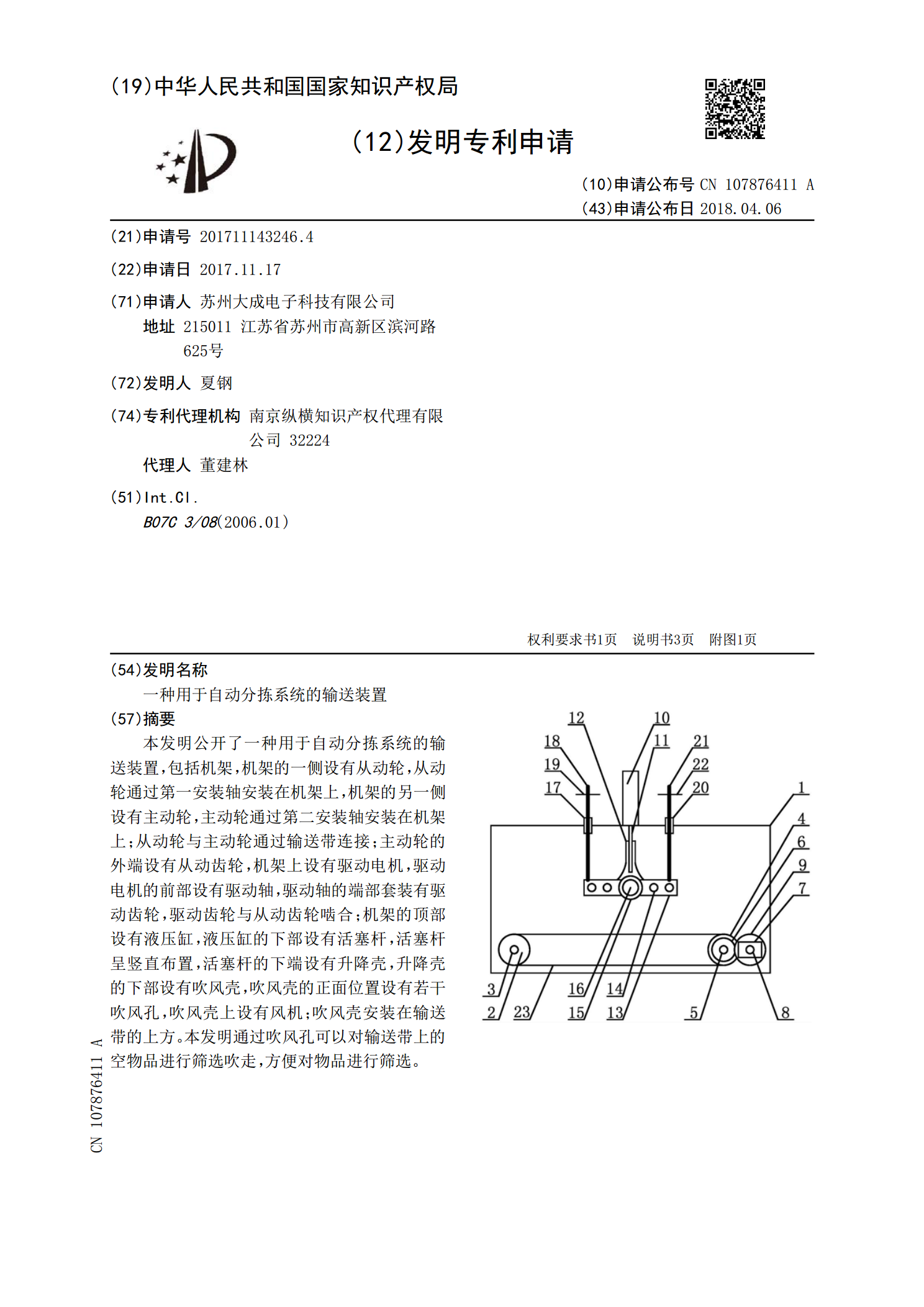
本发明公开了一种用于自动分拣系统的输送装置,包括机架,机架的一侧设有从动轮,从动轮通过第一安装轴安装在机架上,机架的另一侧设有主动轮,主动轮通过第二安装轴安装在机架上;从动轮与主动轮通过输送带连接;主动轮的外端设有从动齿轮,机架上设有驱动电机,驱动电机的前部设有驱动轴,驱动轴的端部套装有驱动齿轮,驱动齿轮与从动齿轮啮合;机架的顶部设有液压缸,液压缸的下部设有活塞杆,活塞杆呈竖直布置,活塞杆的下端设有升降壳,升降壳的下部设有吹风壳,吹风壳的正面位置设有若干吹风孔,吹风壳上设有风机;吹风壳安装在输送带的上方。