
列车轮对踏面和轮缘在线高速检测系统及其检测方法.pdf

一吃****昕靓


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

列车轮对踏面和轮缘在线高速检测系统及其检测方法.pdf
本发明公开了一种列车轮对踏面与轮缘在线高速检测系统及其检测方法,检测系统包括:在轨道的外侧依次排布的目标检测装置、测速装置、位置判断装置、图像采集装置以及图像处理装置和控制装置,图像采集装置包括多组线结构光源和高速面阵相机,光平面与轮对相交所形成的交线位于列车喷砂管/刹车装置与铁轨之间,面阵相机的成像视场含盖并稍大于交线区域;检测步骤包括①利用canny边缘检测的方法判断轮对是否有缺陷;②计算缺陷深度从而获得缺陷的大小;③将每幅图像中的光带部分依次拼接成一幅图像。本发明的有益之处在于:避免了列车喷砂管与刹

高速列车轮对踏面擦伤检测系统及检测方法.docx
高速列车轮对踏面擦伤检测系统及检测方法高速列车是现代交通运输领域的重要组成部分。为了确保高速列车的安全运行,轮对作为关键部件之一,需要定期进行检测和维护。轮对的踏面擦伤是一种常见的磨损形式,如果不及时发现和修复,可能会导致轮对失效,对列车的运行安全产生潜在威胁。因此,研发高速列车轮对踏面擦伤检测系统及检测方法具有重要的实际意义。高速列车轮对踏面擦伤检测系统一般由传感器、数据采集设备、数据处理算法和人机界面等组成。传感器通过接触轮对踏面,实时感知轮面的状态。传感器的选择要考虑到可靠性、精度和适应能力等因素。
一种高速列车轮对踏面擦伤检测系统及检测方法.pdf
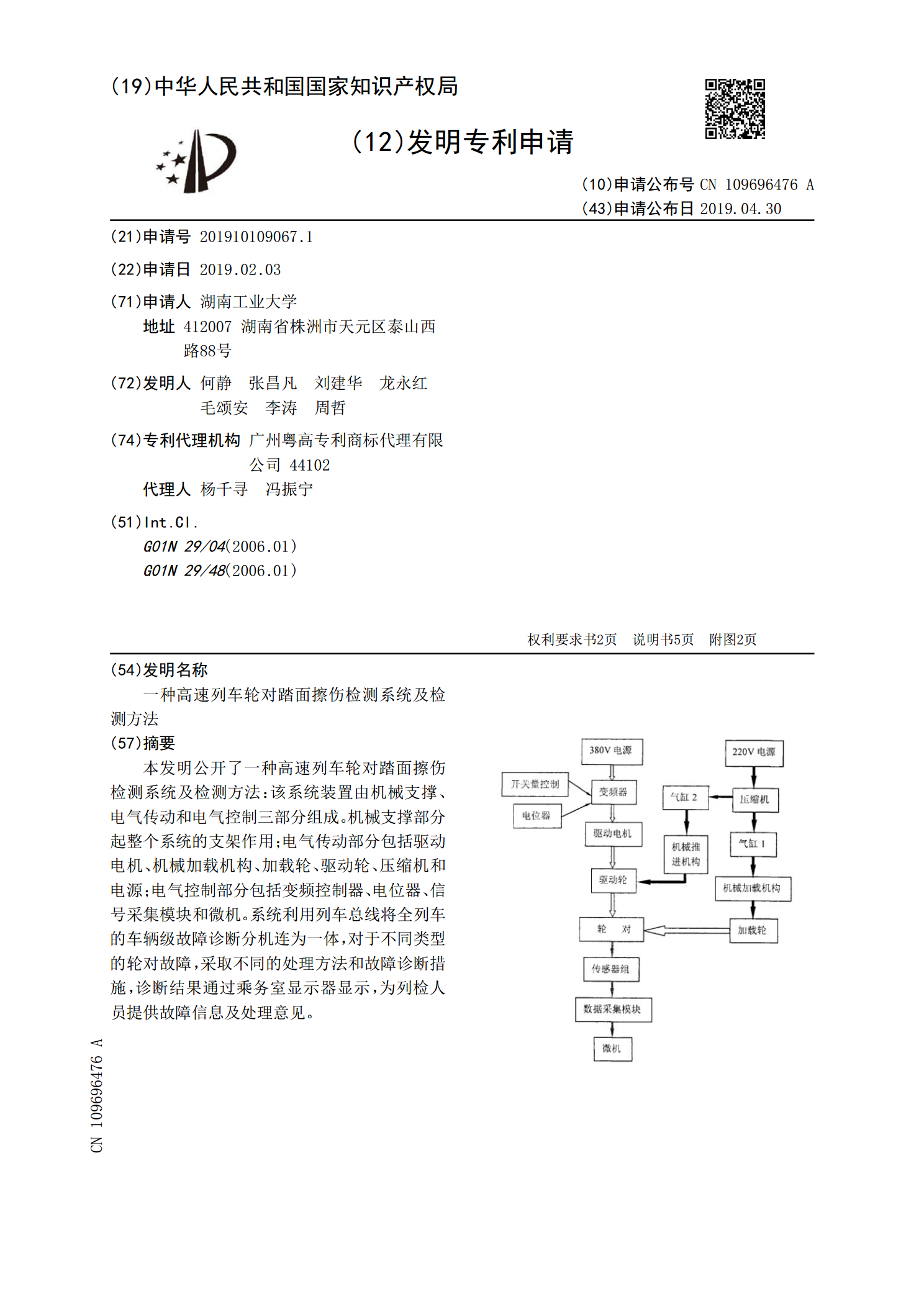
本发明公开了一种高速列车轮对踏面擦伤检测系统及检测方法:该系统装置由机械支撑、电气传动和电气控制三部分组成。机械支撑部分起整个系统的支架作用;电气传动部分包括驱动电机、机械加载机构、加载轮、驱动轮、压缩机和电源;电气控制部分包括变频控制器、电位器、信号采集模块和微机。系统利用列车总线将全列车的车辆级故障诊断分机连为一体,对于不同类型的轮对故障,采取不同的处理方法和故障诊断措施,诊断结果通过乘务室显示器显示,为列检人员提供故障信息及处理意见。
一种轮对踏面在线检测方法.pdf
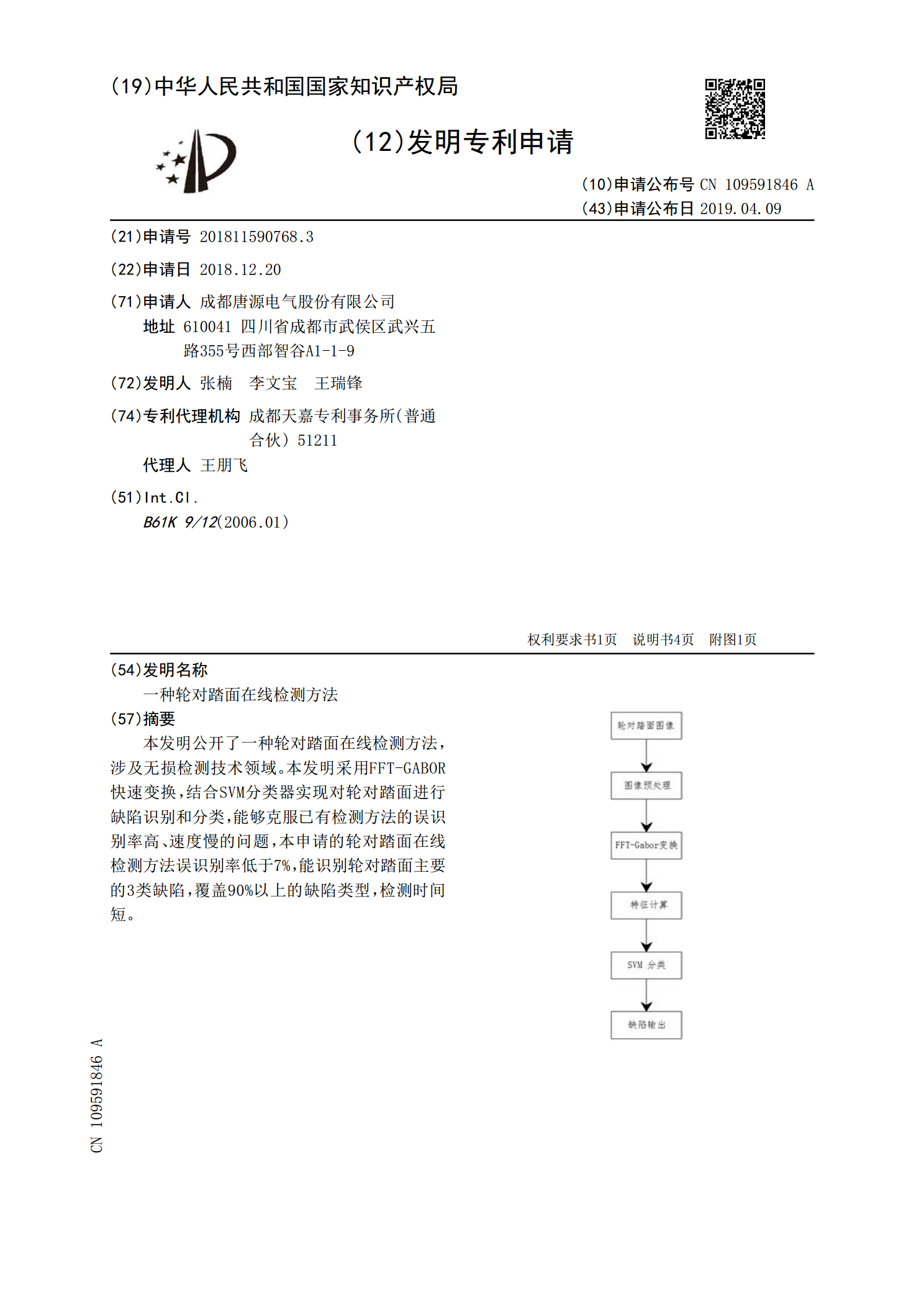
本发明公开了一种轮对踏面在线检测方法,涉及无损检测技术领域。本发明采用FFT‑GABOR快速变换,结合SVM分类器实现对轮对踏面进行缺陷识别和分类,能够克服已有检测方法的误识别率高、速度慢的问题,本申请的轮对踏面在线检测方法误识别率低于7%,能识别轮对踏面主要的3类缺陷,覆盖90%以上的缺陷类型,检测时间短。

基于目标检测算法的列车轮对踏面缺陷检测方法及系统.pdf
本发明公开了一种基于目标检测算法的列车轮对踏面缺陷检测方法,首先通过Cdarknet53主干特征提取网络和Spp对输入样本进行多尺度特征提取;其次提出的多尺度特征融合对底层特征进行一次融合,将特征融合输出不同分辨率大小的一次融合特征,可以包含缺陷更多的语义信息和位置细节;基于这些多尺度融合特征,采用路径聚合网络对不同分辨率大小的特征图进行二次融合;最后辅以改进的损失函数,提高抗干扰性,输出检测结果。本发明通过多尺度特征融合,解决了干扰、噪音背景影响故障特征的有效提取,存在踏面缺陷样本少、缺陷目标小的问题,